Das könnte Ihnen auch gefallen
- FEA Based Comparative Analysis of Tube Drawing ProcessDokument11 SeitenFEA Based Comparative Analysis of Tube Drawing ProcessIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Review On Extraction and Isolation of Cashew Nut Shell LiquidDokument8 SeitenReview On Extraction and Isolation of Cashew Nut Shell LiquidIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Zero Voltage Switching ConvertersDokument8 SeitenZero Voltage Switching ConvertersIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Control of Grid Connected Inverter System For Sinusoidal Current Injection With Improved PerformanceDokument10 SeitenControl of Grid Connected Inverter System For Sinusoidal Current Injection With Improved PerformanceIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Failure Analysis of Buttress, Acme and Modified Square Threaded Mild Steel (Is2062) Tie RodsDokument7 SeitenFailure Analysis of Buttress, Acme and Modified Square Threaded Mild Steel (Is2062) Tie RodsIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Offline Handwritten Signature Verification Using Neural NetworkDokument5 SeitenOffline Handwritten Signature Verification Using Neural NetworkIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Health Monitoring KIOSK: An Effective System For Rural Health ManagementDokument4 SeitenHealth Monitoring KIOSK: An Effective System For Rural Health ManagementIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Effect of Adding Oxygen Containing Additives To Unleaded Gasoline On Exhaust EmissionDokument9 SeitenEffect of Adding Oxygen Containing Additives To Unleaded Gasoline On Exhaust EmissionIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Intelligent Vehicle Using Embedded SystemDokument5 SeitenIntelligent Vehicle Using Embedded SystemIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Design of Carry Save Adder Using Transmission Gate LogicDokument5 SeitenDesign of Carry Save Adder Using Transmission Gate LogicIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Manually Operated Rotary Lawn MowerDokument4 SeitenManually Operated Rotary Lawn MowerIJIERT-International Journal of Innovations in Engineering Research and TechnologyNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- 2nd Year PHYSICS Full Book Solved MCQs by Bismillah Academy 0300-7980055Dokument68 Seiten2nd Year PHYSICS Full Book Solved MCQs by Bismillah Academy 0300-7980055AFTABNoch keine Bewertungen
- Partial DischargeDokument6 SeitenPartial Dischargebrockwell4960% (1)
- Bearing Embedment RTD: Features / BenefitsDokument1 SeiteBearing Embedment RTD: Features / BenefitscaseyNoch keine Bewertungen
- TOXFREE ZH ROZ1-K (AS) VFD EMC 0,6 1 KVDokument3 SeitenTOXFREE ZH ROZ1-K (AS) VFD EMC 0,6 1 KVPatricia SorianoNoch keine Bewertungen
- Chapter 1: Basic Concepts: Today's ObjectivesDokument16 SeitenChapter 1: Basic Concepts: Today's ObjectivesWan RodieNoch keine Bewertungen
- Schneider Clipsal ESM32D20NADokument3 SeitenSchneider Clipsal ESM32D20NAUmer Farooq100% (1)
- 2016 Bio Logic VSP VMP3Dokument3 Seiten2016 Bio Logic VSP VMP3Carlos GonzalezNoch keine Bewertungen
- Electrostatic 1 (Mcq. For Board)Dokument9 SeitenElectrostatic 1 (Mcq. For Board)Sheetal meenaNoch keine Bewertungen
- FireNET Plus Install Manual V1.075 1127Dokument156 SeitenFireNET Plus Install Manual V1.075 1127Amada Barrera100% (1)
- Training Progress Report - Comms (14May-29June)Dokument47 SeitenTraining Progress Report - Comms (14May-29June)Tawanda Daniel DenguNoch keine Bewertungen
- 3 DAD-N-103 Relay SettingsDokument24 Seiten3 DAD-N-103 Relay SettingsEagle AgilityNoch keine Bewertungen
- TN-101 SER System ArchitecturesDokument6 SeitenTN-101 SER System ArchitecturesTARAKESHWARIRNoch keine Bewertungen
- Ia Ha 2Dokument4 SeitenIa Ha 2Er Shubham RaksheNoch keine Bewertungen
- 48 TMSS 04 R0Dokument0 Seiten48 TMSS 04 R0renjithas2005100% (1)
- Foot Impulse Sealer ManualDokument6 SeitenFoot Impulse Sealer ManualMike PandeyNoch keine Bewertungen
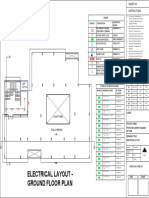
- Electrical Layout - Ground Floor Plan: Sheet No. InstructionsDokument1 SeiteElectrical Layout - Ground Floor Plan: Sheet No. InstructionsAbhishek AjayNoch keine Bewertungen
- Podcast Recording StudioDokument9 SeitenPodcast Recording StudioAgus Nawir100% (1)
- Aviat E-Band Wireless Technology V1.0 PDFDokument11 SeitenAviat E-Band Wireless Technology V1.0 PDFtarreroNoch keine Bewertungen
- خطوات عمل جداول الحسابات Panel SchedulesDokument6 Seitenخطوات عمل جداول الحسابات Panel SchedulesMOAZ ASHRAFNoch keine Bewertungen
- Antena DatasheetDokument2 SeitenAntena DatasheetDeyaniraOjedaNoch keine Bewertungen
- NX200Dokument102 SeitenNX200FABIANNoch keine Bewertungen
- Paper - 062 - INTEGRATION OF SOLAR PHOTOVOLTAIC DISTRIBUTED GENERATION IN NIGERIAN POWER SYSTEM NETWORKDokument6 SeitenPaper - 062 - INTEGRATION OF SOLAR PHOTOVOLTAIC DISTRIBUTED GENERATION IN NIGERIAN POWER SYSTEM NETWORKabera alemayehuNoch keine Bewertungen
- Convertizor de Frecventa Delta ManualDokument25 SeitenConvertizor de Frecventa Delta ManualdanimihalcaNoch keine Bewertungen
- IEC Asea Siemens Sprecher MeidenDokument9 SeitenIEC Asea Siemens Sprecher MeidenEspidan68Noch keine Bewertungen
- Noblex 14TC659Dokument26 SeitenNoblex 14TC659Alberto SolanNoch keine Bewertungen
- LPBDokument6 SeitenLPBalbertoNoch keine Bewertungen
- Kokm For Gis - 1vlc000609 Rev.4, enDokument24 SeitenKokm For Gis - 1vlc000609 Rev.4, enTetianaNoch keine Bewertungen
- 99.automatic Auditorium ControllingDokument3 Seiten99.automatic Auditorium ControllingDinesh DspNoch keine Bewertungen
- References: Received 23 July 2013 Revised 21 March 2014Dokument1 SeiteReferences: Received 23 July 2013 Revised 21 March 2014ab__ismNoch keine Bewertungen
- MAIN (5) MAIN (1) MAIN (2) Function (5) : Block DiagramDokument1 SeiteMAIN (5) MAIN (1) MAIN (2) Function (5) : Block DiagramCarlos GonçalvesNoch keine Bewertungen