Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Manual de Servicio y Reparacion IR Blaw Knox PF6110Dokument756 SeitenManual de Servicio y Reparacion IR Blaw Knox PF6110Ruben Raygosa100% (4)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Hyster G006 (H135XL H155XL) Forklift Parts ManualDokument15 SeitenHyster G006 (H135XL H155XL) Forklift Parts ManualManuals CE & Ag0% (1)
- 4r70w 1-2 Accumulator Spring ChartDokument3 Seiten4r70w 1-2 Accumulator Spring ChartDarrinNoch keine Bewertungen
- 558 Servo Pneumatic Universal Testing Machine For Resilient ModulusDokument6 Seiten558 Servo Pneumatic Universal Testing Machine For Resilient ModulusRajesh KumarNoch keine Bewertungen
- Pefy P15nmsu eDokument10 SeitenPefy P15nmsu eAcero StahlNoch keine Bewertungen
- Lab Report 2: BTM 2243 Fluid Power TechnologyDokument5 SeitenLab Report 2: BTM 2243 Fluid Power TechnologyIbrahim AdhamNoch keine Bewertungen
- BAH Series 6000 Manguard - 113534-91Dokument40 SeitenBAH Series 6000 Manguard - 113534-91AhmedNoch keine Bewertungen
- Mechanical Properties of Solids - NotesDokument15 SeitenMechanical Properties of Solids - NotesNyra HillsNoch keine Bewertungen
- Car Park Ventilation SystemDokument16 SeitenCar Park Ventilation Systemtariq.s8261Noch keine Bewertungen
- Stresses in Thin, Thick, Spherical PVsDokument22 SeitenStresses in Thin, Thick, Spherical PVsSuresh SjNoch keine Bewertungen
- E1002-11 Standard Practice For Leaks Using UltrasonicDokument4 SeitenE1002-11 Standard Practice For Leaks Using UltrasonicudomNoch keine Bewertungen
- Quick Start Guide: Operating & Maintenance InstructionsDokument20 SeitenQuick Start Guide: Operating & Maintenance InstructionsEnrique CaboNoch keine Bewertungen
- WEBM005500 - SK714 - SK815 - SK815-5 Turbo PDFDokument258 SeitenWEBM005500 - SK714 - SK815 - SK815-5 Turbo PDFdrmasster100% (3)
- Asme B31.8-2016Dokument1 SeiteAsme B31.8-2016buihoangphuong100% (1)
- Humidifier Servo and Non Servo Mode of Delivery PDFDokument2 SeitenHumidifier Servo and Non Servo Mode of Delivery PDFAnne Stephany ZambranoNoch keine Bewertungen
- 4we6 Series 6xDokument12 Seiten4we6 Series 6xJas SumNoch keine Bewertungen
- F-CD-19 Pipe and Weld Book 26-Abr-19Dokument84 SeitenF-CD-19 Pipe and Weld Book 26-Abr-19Jorge Isaac Lara RamosNoch keine Bewertungen
- Pages From 0625 - w15 - QP - 33-03Dokument2 SeitenPages From 0625 - w15 - QP - 33-03lelon ongNoch keine Bewertungen
- 1 s2.0 S1270963820308646 MainDokument12 Seiten1 s2.0 S1270963820308646 MainSrushtiNoch keine Bewertungen
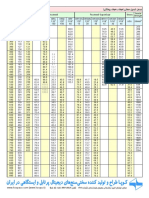
- Hardness Conversion Table: Tensile StrengthDokument1 SeiteHardness Conversion Table: Tensile StrengthMehdy HosseiniNoch keine Bewertungen
- Heat Flux Simulation On ABAQUSDokument10 SeitenHeat Flux Simulation On ABAQUSMuhammad WaqasNoch keine Bewertungen
- Astm D 412-87Dokument12 SeitenAstm D 412-87chaivatNoch keine Bewertungen
- Bearing Failure Analysys ChartDokument2 SeitenBearing Failure Analysys Chartpepe_lube0% (1)
- 9th Physics Quiz QueDokument9 Seiten9th Physics Quiz QueNisha PatidarNoch keine Bewertungen
- 2-Basics Electronics TwoDokument42 Seiten2-Basics Electronics TwoOmar EzzNoch keine Bewertungen
- Transmissions - A - T Circuit (E4OD) (Transmission and Drivetrain) - ALLDATA RepairDokument1 SeiteTransmissions - A - T Circuit (E4OD) (Transmission and Drivetrain) - ALLDATA RepairManzanitas AsosNoch keine Bewertungen
- Multiple Box MotionsDokument10 SeitenMultiple Box MotionsSambit Mohapatra33% (3)
- 06 Transmission and AxlesDokument33 Seiten06 Transmission and AxlesOsvaldo Donoso TorresNoch keine Bewertungen
- Simulink Exercise PDFDokument8 SeitenSimulink Exercise PDFNurshazwani syuhada bt al- badriNoch keine Bewertungen