Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
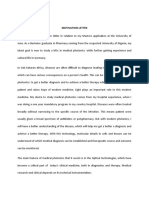
- Medical PhotonicsDokument2 SeitenMedical PhotonicsZikoraNoch keine Bewertungen
- Chimney SolvedDokument2 SeitenChimney SolvedJasem Abdurahman50% (4)
- Seismic Fragilities For Reinforced Concrete Buildings With Consideration of IrregularitiesDokument13 SeitenSeismic Fragilities For Reinforced Concrete Buildings With Consideration of IrregularitiesmohamedNoch keine Bewertungen
- MCQ Nano Science and FEDokument6 SeitenMCQ Nano Science and FEJamilur Rahman100% (1)
- TCC TR 9 P4 Q1 M Lu EF8 WAHHDokument13 SeitenTCC TR 9 P4 Q1 M Lu EF8 WAHHspbarathrajNoch keine Bewertungen
- MID 039 - CID 1846 - FMI 09: Pantalla AnteriorDokument6 SeitenMID 039 - CID 1846 - FMI 09: Pantalla AnteriorWalterNoch keine Bewertungen
- Ch06-Deflection of Beams - LectureDokument24 SeitenCh06-Deflection of Beams - LectureLeo Wong100% (1)
- How Is It That Everything Is Made of Star Dust?Dokument9 SeitenHow Is It That Everything Is Made of Star Dust?GeorgeNoch keine Bewertungen
- Fiitjee: Solutions To JEE (Main) - 2021Dokument45 SeitenFiitjee: Solutions To JEE (Main) - 2021ik62299Noch keine Bewertungen
- ASTM C506-08a Reinforced Concrete Arch Culvert, Storm Drain, and Sewer PipeDokument7 SeitenASTM C506-08a Reinforced Concrete Arch Culvert, Storm Drain, and Sewer PipeLiu ZhenguoNoch keine Bewertungen
- Technical Data Sheet "Infinity 3100": 10 15 20 kVA 3Ph - 1PhDokument7 SeitenTechnical Data Sheet "Infinity 3100": 10 15 20 kVA 3Ph - 1PhFlorin MNoch keine Bewertungen
- Cox Et Al - 2019 - Articulated Concrete Block Stability Assessment For Channelized FlowDokument8 SeitenCox Et Al - 2019 - Articulated Concrete Block Stability Assessment For Channelized FlowRiccardo ZabattaNoch keine Bewertungen
- General Knowledge For PPSC, FPSC, SPSC, KPPSC, NTS, Ots, Pts Tests-Part2Dokument25 SeitenGeneral Knowledge For PPSC, FPSC, SPSC, KPPSC, NTS, Ots, Pts Tests-Part2Muhammad SiddiqueNoch keine Bewertungen
- Choosing A Scale Worksheet: Length: 36 Inches Height 81 Inches Width: 18 InchesDokument3 SeitenChoosing A Scale Worksheet: Length: 36 Inches Height 81 Inches Width: 18 InchesAbdullah ShahidNoch keine Bewertungen
- 30g120asw Transistor Canal NDokument4 Seiten30g120asw Transistor Canal NCaat 1021Noch keine Bewertungen
- Objectives:: Aerodynamics of BobsleighDokument1 SeiteObjectives:: Aerodynamics of BobsleighChirag JainNoch keine Bewertungen
- F325 Acids, Bases and Buffers HWDokument22 SeitenF325 Acids, Bases and Buffers HWSigourney MarshNoch keine Bewertungen
- Particle Technology Che Calculations Separation Processes Heat and Mass TransferDokument1 SeiteParticle Technology Che Calculations Separation Processes Heat and Mass TransferAduchelab AdamsonuniversityNoch keine Bewertungen
- LTA320HN02 W SamsungDokument28 SeitenLTA320HN02 W SamsungRavi SharmaNoch keine Bewertungen
- Welding Consumables Product Catalogue 09 10Dokument698 SeitenWelding Consumables Product Catalogue 09 10stkm100% (2)
- Handelling ProblemsDokument2 SeitenHandelling ProblemsAkash NandiNoch keine Bewertungen
- Trial 18 P 3Dokument11 SeitenTrial 18 P 3Zalini AbdullahNoch keine Bewertungen
- DVP32SM SN Instruction enDokument2 SeitenDVP32SM SN Instruction enخطاب الشاميNoch keine Bewertungen
- KSB Etabloc Jelleggorbe 50hzDokument172 SeitenKSB Etabloc Jelleggorbe 50hzUmar MajeedNoch keine Bewertungen
- Physics GR 11 and GR 12 Energy ReviewDokument19 SeitenPhysics GR 11 and GR 12 Energy ReviewAN - 12BM 795510 Harold M Brathwaite SSNoch keine Bewertungen
- Grounding & Lighting Prot-Grounding BarDokument2 SeitenGrounding & Lighting Prot-Grounding BarAlifia AiniNoch keine Bewertungen
- PHY166Dokument142 SeitenPHY166اااتتتNoch keine Bewertungen
- Chemical Reactions and Chemical EquationsDokument34 SeitenChemical Reactions and Chemical EquationsIvy Joyce BuanNoch keine Bewertungen
- FineLIFT OutputSampleDokument43 SeitenFineLIFT OutputSampleparagbholeNoch keine Bewertungen
- sc21cl 104l2322 R404a-R507 220v 50hz 05-2016 cnsd460x302Dokument2 Seitensc21cl 104l2322 R404a-R507 220v 50hz 05-2016 cnsd460x302TarekNoch keine Bewertungen