Das könnte Ihnen auch gefallen
- Detección de Posición A Partir de La Medición de Un Campo MagnéticoDokument15 SeitenDetección de Posición A Partir de La Medición de Un Campo MagnéticoFlavio Agusto SanchezNoch keine Bewertungen
- Problemas Propuestos de Capacitancia y DielectricosDokument5 SeitenProblemas Propuestos de Capacitancia y DielectricosFlavio Agusto SanchezNoch keine Bewertungen
- EelectricaDokument8 SeitenEelectricaFlavio Agusto SanchezNoch keine Bewertungen
- Universidad Nacional de San Agustín de ArequipaDokument1 SeiteUniversidad Nacional de San Agustín de ArequipaFlavio Agusto SanchezNoch keine Bewertungen
- La Guia MetAs 10 02 Factor de PotenciaDokument7 SeitenLa Guia MetAs 10 02 Factor de PotenciaGerardo PonceNoch keine Bewertungen
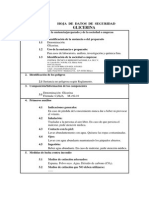
- Glice RinaDokument9 SeitenGlice RinaJ Cristopher CGNoch keine Bewertungen
- Detección de Posición A Partir de La Medición de Un Campo MagnéticoDokument15 SeitenDetección de Posición A Partir de La Medición de Un Campo MagnéticoFlavio Agusto SanchezNoch keine Bewertungen
- IntroducciónDokument15 SeitenIntroducciónFlavio Agusto SanchezNoch keine Bewertungen
- Detección de Una Posición A Partir de La Medición Del Campo MagnéticoDokument1 SeiteDetección de Una Posición A Partir de La Medición Del Campo MagnéticoFlavio Agusto SanchezNoch keine Bewertungen
- II EXAMEN PARCIAL Revision Del IntentoDokument5 SeitenII EXAMEN PARCIAL Revision Del IntentoFlavio Agusto SanchezNoch keine Bewertungen
- Fehling Solucion B - LabboxDokument10 SeitenFehling Solucion B - LabboxIsabelita NenaNoch keine Bewertungen
- GlicerinaDokument5 SeitenGlicerinaCarlosCurseGutierrezNoch keine Bewertungen
- FENOLDokument2 SeitenFENOL'Jose Alberto AlbornozNoch keine Bewertungen
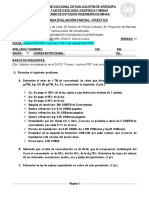
- Segunda Evaluación Parcial DPMS - PrácticaDokument3 SeitenSegunda Evaluación Parcial DPMS - PrácticaFlavio Agusto SanchezNoch keine Bewertungen
- Capítulo 5 - Conceptos Fundamentales de La Seguridad y Salud en El TrabajoDokument17 SeitenCapítulo 5 - Conceptos Fundamentales de La Seguridad y Salud en El TrabajoFlavio Agusto SanchezNoch keine Bewertungen
- 2do Examen Parcial - Revisión Del IntentoDokument5 Seiten2do Examen Parcial - Revisión Del IntentoFlavio Agusto SanchezNoch keine Bewertungen
- Capítulo 6 - Marco Normativo Vigente de Seguridad y Salud en El TrabajoDokument34 SeitenCapítulo 6 - Marco Normativo Vigente de Seguridad y Salud en El TrabajoFlavio Agusto SanchezNoch keine Bewertungen
- Formato IPER para evaluación de riesgos en operación de scoop mineroDokument4 SeitenFormato IPER para evaluación de riesgos en operación de scoop mineroFlavio Agusto SanchezNoch keine Bewertungen
- Presentacion #2 Introducción Al Procesamiento de Minerales.Dokument50 SeitenPresentacion #2 Introducción Al Procesamiento de Minerales.Flavio Agusto SanchezNoch keine Bewertungen
- Pregunta 6Dokument1 SeitePregunta 6Flavio Agusto SanchezNoch keine Bewertungen
- Iperc Cimbras MetalicasDokument14 SeitenIperc Cimbras MetalicasFlavio Agusto SanchezNoch keine Bewertungen
- Presentacion #5 Concesión Minera PDFDokument22 SeitenPresentacion #5 Concesión Minera PDFMicky PerNoch keine Bewertungen
- 04 ComentariosDokument3 Seiten04 ComentariosFlavio Agusto SanchezNoch keine Bewertungen
- Presentacion #1 Actividad Minera ActualizadoDokument54 SeitenPresentacion #1 Actividad Minera ActualizadoFlavio Agusto SanchezNoch keine Bewertungen
- PracticaDokument10 SeitenPracticaFlavio Agusto SanchezNoch keine Bewertungen
- 01 Inmovilizar PanelesDokument29 Seiten01 Inmovilizar PanelesFlavio Agusto SanchezNoch keine Bewertungen
- Resumen de VideosDokument4 SeitenResumen de VideosFlavio Agusto SanchezNoch keine Bewertungen
- 05 FormatoDokument8 Seiten05 FormatoFlavio Agusto SanchezNoch keine Bewertungen
- 02 Ingreso Datos - ListadoDokument3 Seiten02 Ingreso Datos - ListadoFlavio Agusto SanchezNoch keine Bewertungen
- 05 FormatoDokument8 Seiten05 FormatoFlavio Agusto SanchezNoch keine Bewertungen
- Decibeles, Filtro Pasa Bajas, EtcDokument5 SeitenDecibeles, Filtro Pasa Bajas, EtcRonald PazNoch keine Bewertungen
- Documento Sin TítuloDokument9 SeitenDocumento Sin TítuloDaniela RodriguezNoch keine Bewertungen
- Codigos de Falla Obd 1 y 2Dokument80 SeitenCodigos de Falla Obd 1 y 2Hamlet Esau Toledo100% (1)
- Botonera de cabina precableadaDokument31 SeitenBotonera de cabina precableadaryr6ascensores100% (1)
- Termómetro Digital Basado en ArduinoDokument17 SeitenTermómetro Digital Basado en ArduinoLy Fotoestudio DigitalcaNoch keine Bewertungen
- Final 3 Control y Automatizacion - MalcaDokument13 SeitenFinal 3 Control y Automatizacion - MalcaLuis Fernando Osorio SanchezNoch keine Bewertungen
- Expediente Luz Del Sur (Inicio de Obra) Revisión 01Dokument36 SeitenExpediente Luz Del Sur (Inicio de Obra) Revisión 01Erick Lasteros Manzaneda100% (1)
- Evaluación - Ene Tci202 Circuitos Electrónicos Análogos ...Dokument3 SeitenEvaluación - Ene Tci202 Circuitos Electrónicos Análogos ...Richard Hipólito0% (1)
- Practica 1 F IV 2023Dokument7 SeitenPractica 1 F IV 2023rafa marquezNoch keine Bewertungen
- Clases Pro 2Dokument73 SeitenClases Pro 2Vicente AriasNoch keine Bewertungen
- Fundamentos Tecnicos Argenta eDokument49 SeitenFundamentos Tecnicos Argenta eNoelia BallestínNoch keine Bewertungen
- Laboratorio 2-Te1Dokument9 SeitenLaboratorio 2-Te1Exon PingoNoch keine Bewertungen
- Empalmes y Tecnica de Empalmes en Lineas de DistribucionDokument3 SeitenEmpalmes y Tecnica de Empalmes en Lineas de DistribucionStalin MazaNoch keine Bewertungen
- Divisor de Voltaje y Divisor de CorrienteDokument7 SeitenDivisor de Voltaje y Divisor de CorrienteJosé David Pérez BetancourtNoch keine Bewertungen
- Análisis de Circuitos de CD v2 PDFDokument8 SeitenAnálisis de Circuitos de CD v2 PDFSuishyNoch keine Bewertungen
- Exposicion Parcial 1Dokument137 SeitenExposicion Parcial 1Jose CastilloNoch keine Bewertungen
- Temario Automatización IndustrialDokument2 SeitenTemario Automatización IndustrialPercy Escudero CamposNoch keine Bewertungen
- Cálculo de cortocircuitos con métodos ANSI/IEEE e IECDokument7 SeitenCálculo de cortocircuitos con métodos ANSI/IEEE e IECJose RomeroNoch keine Bewertungen
- Ejercicios 07 TimersDokument15 SeitenEjercicios 07 TimersIvan YeroviNoch keine Bewertungen
- Mitsubishi Electric Europe Robots de Brazo Articulado Robots de Brazo Articulado Melfa Serie RV 2sdb 632568 PDFDokument4 SeitenMitsubishi Electric Europe Robots de Brazo Articulado Robots de Brazo Articulado Melfa Serie RV 2sdb 632568 PDFMaría Belén ParedesNoch keine Bewertungen
- Practica Final de Cargas Eléctricas Y La Ley de Coulomb Marca La Respuesta Correcta de Las Siguientes Interrogantes y EnunciadosDokument3 SeitenPractica Final de Cargas Eléctricas Y La Ley de Coulomb Marca La Respuesta Correcta de Las Siguientes Interrogantes y EnunciadosAriana CalcinaNoch keine Bewertungen
- Especificaciones de La Sony Vaio VGN-FZ190 FEDokument1 SeiteEspecificaciones de La Sony Vaio VGN-FZ190 FEHugo MalpartidaNoch keine Bewertungen
- Calculo de Potencias DWDM PDFDokument27 SeitenCalculo de Potencias DWDM PDFGermán AtachoNoch keine Bewertungen
- Medina Cabana Alex GonzaloDokument3 SeitenMedina Cabana Alex GonzaloAlex MedinaNoch keine Bewertungen
- Valleylab Force 2 Electrobisturi Manual Español PDFDokument74 SeitenValleylab Force 2 Electrobisturi Manual Español PDFJeffer PuentesNoch keine Bewertungen
- Cap8 DiagramasDokument35 SeitenCap8 DiagramasDaniel ParedesNoch keine Bewertungen
- Circuito RL en serie: Relaciones de voltaje y ángulo de faseDokument3 SeitenCircuito RL en serie: Relaciones de voltaje y ángulo de faseDavid GanánNoch keine Bewertungen
- Clase 2.4 Solicitaciones Térmicas y Físicas y Trabajo en ClasesDokument4 SeitenClase 2.4 Solicitaciones Térmicas y Físicas y Trabajo en ClasesCarlos Moraga CopierNoch keine Bewertungen
- Tarea 1 - Diodos SemiconductoresDokument2 SeitenTarea 1 - Diodos SemiconductoresPame GomezNoch keine Bewertungen