Das könnte Ihnen auch gefallen
- Motor Sincrno de Imanes PermanentesDokument8 SeitenMotor Sincrno de Imanes PermanentesJuan Salvador CastañedaNoch keine Bewertungen
- Unidad 6-1Dokument12 SeitenUnidad 6-1Ediquio Gonzalez0% (1)
- Acciona 3Dokument33 SeitenAcciona 3Roberto CanqueNoch keine Bewertungen
- EP-Pauta Prueba Parcial 1Dokument5 SeitenEP-Pauta Prueba Parcial 1jaimeNoch keine Bewertungen
- Presentación - LAB. N2Dokument27 SeitenPresentación - LAB. N2Rensso D'LuisNoch keine Bewertungen
- Acciona 7Dokument29 SeitenAcciona 7Roberto CanqueNoch keine Bewertungen
- Circuito PPMDokument3 SeitenCircuito PPMRobert Cerda Luengo100% (1)
- KOSA EspDokument376 SeitenKOSA EspInma GIL100% (4)
- Informe Motores BrushlessDokument3 SeitenInforme Motores BrushlessJohny Danilo Zhizhingo HugoNoch keine Bewertungen
- Practica 5 Ruben Yagual PDFDokument20 SeitenPractica 5 Ruben Yagual PDFreysNoch keine Bewertungen
- LABORATORIO MAQUINAS - Máquina SíncronaDokument11 SeitenLABORATORIO MAQUINAS - Máquina SíncronaJon BrownNoch keine Bewertungen
- IPD416 - Tarea 3 - 4 - Mario LDokument39 SeitenIPD416 - Tarea 3 - 4 - Mario LMarioNoch keine Bewertungen
- Informe Medicion de TiemposDokument4 SeitenInforme Medicion de TiemposAlejandro MontoyaNoch keine Bewertungen
- Lab-3 N Equ-2 PreinformeDokument2 SeitenLab-3 N Equ-2 PreinformeJohn Huertas MontesNoch keine Bewertungen
- PLC Nivel 1Dokument26 SeitenPLC Nivel 1FedeNoch keine Bewertungen
- Máquina de InducciónDokument20 SeitenMáquina de InducciónFrancisco SonnenburgNoch keine Bewertungen
- Elo384 Capitulo3aDokument39 SeitenElo384 Capitulo3aJonathan D. PortaNoch keine Bewertungen
- Unidad 2 Cálculo de FallasDokument95 SeitenUnidad 2 Cálculo de FallasFreddy Jonathan Condori TurpoNoch keine Bewertungen
- Elo381 Capitulo 05 InversoresDokument45 SeitenElo381 Capitulo 05 InversoresFalquian De EleniumNoch keine Bewertungen
- Informe Previo 7 ElectronicaDokument5 SeitenInforme Previo 7 ElectronicaAnthony Hbk JerichoNoch keine Bewertungen
- Taller Analisis de Cortocircuito Trifasico CorreccionDokument14 SeitenTaller Analisis de Cortocircuito Trifasico CorreccionAndrea Gutierrez AguilarNoch keine Bewertungen
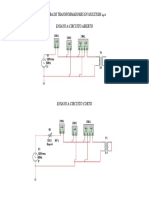
- Prueba de Transformadores en Multisim 14Dokument1 SeitePrueba de Transformadores en Multisim 14Joglupe0% (1)
- Rectificadores Controlados TrifasicosDokument7 SeitenRectificadores Controlados TrifasicosjejvargasroNoch keine Bewertungen
- Modelado de Un SEPDokument4 SeitenModelado de Un SEPMarcoValdez0% (1)
- 5 2labep2017-IiDokument12 Seiten5 2labep2017-IiHenry Valencia0% (1)
- Previo 2 - 2018 FIEE Lab. Circuitos ElectronicosDokument4 SeitenPrevio 2 - 2018 FIEE Lab. Circuitos ElectronicosSergioLopezCornejoNoch keine Bewertungen
- Práctica 3 - Encendido y Apagado de Un TiristorDokument11 SeitenPráctica 3 - Encendido y Apagado de Un TiristorBrandon VallejoNoch keine Bewertungen
- Jack JK-8558Dokument10 SeitenJack JK-8558Jose Antonio Rojas BautistaNoch keine Bewertungen
- Informe 1 Maquinas IiiDokument10 SeitenInforme 1 Maquinas IiiCésar PérezNoch keine Bewertungen
- Practica 13 - Pulsos Sincronizados Con La RedDokument4 SeitenPractica 13 - Pulsos Sincronizados Con La RedYilmarNoch keine Bewertungen
- Principales Características de La Corriente Inrush en Transformadores de PotenciaDokument6 SeitenPrincipales Características de La Corriente Inrush en Transformadores de PotenciaEduardo Francisco Briceño CasanaNoch keine Bewertungen
- Laboratorio 3Dokument12 SeitenLaboratorio 3Jhon UZ100% (1)
- Troceadores Tipo BDokument6 SeitenTroceadores Tipo BNey Raul Benji JoaquinNoch keine Bewertungen
- Practica 3 de MaquinasDokument12 SeitenPractica 3 de MaquinasGeo MolinaNoch keine Bewertungen
- Tarea 1 ELO 386Dokument8 SeitenTarea 1 ELO 386Germán Sandoval AndradeNoch keine Bewertungen
- Copia de Copia de FormatoDokument5 SeitenCopia de Copia de FormatoLaura V A. AriasNoch keine Bewertungen
- Amplidina FinalDokument12 SeitenAmplidina FinalJhon Quito0% (1)
- Pruebas de Núcleos A Motores ElectricosDokument2 SeitenPruebas de Núcleos A Motores ElectricosYOMAR PARRANoch keine Bewertungen
- Capitulo 4 ManiobrabilidadDokument6 SeitenCapitulo 4 ManiobrabilidadDavid Alejandro DelgadoNoch keine Bewertungen
- Generador de Disparo Por Circuito Divisor de Frecuencia.Dokument17 SeitenGenerador de Disparo Por Circuito Divisor de Frecuencia.madura123Noch keine Bewertungen
- Convertidores Cc-Ca Multinivel PDFDokument16 SeitenConvertidores Cc-Ca Multinivel PDFedwin quinonezNoch keine Bewertungen
- Informe MaquinasDokument5 SeitenInforme MaquinasMarisol Medina100% (1)
- Comparativo Parametros MM440 Vs ABB PID DormirDokument5 SeitenComparativo Parametros MM440 Vs ABB PID Dormirbenditasea3352Noch keine Bewertungen
- Preinforme UJTDokument4 SeitenPreinforme UJTGabriel CanoNoch keine Bewertungen
- Selección de MotoresDokument9 SeitenSelección de MotoresLuis GodoyNoch keine Bewertungen
- Transform AdoresDokument48 SeitenTransform AdoresElizabeth parraNoch keine Bewertungen
- Control Vectorial Maquinas EléctricasDokument11 SeitenControl Vectorial Maquinas EléctricasChristiaNdrés CarvajalNoch keine Bewertungen
- Arranque SHUNTDokument10 SeitenArranque SHUNTAlexander Valencia100% (1)
- Nuevas Soluciones de Calidad de Energia Especialmente Diseñadas para Aplicaciones IndustrialesDokument1 SeiteNuevas Soluciones de Calidad de Energia Especialmente Diseñadas para Aplicaciones IndustrialesHector Morales BadilloNoch keine Bewertungen
- Maquina Generalizada de Anillos RozantesDokument73 SeitenMaquina Generalizada de Anillos RozantesJosé Luis García CubasNoch keine Bewertungen
- Proteccion Lineas Transmision Cortas en Red Sub Transmision ElectropazDokument92 SeitenProteccion Lineas Transmision Cortas en Red Sub Transmision ElectropazhectorNoch keine Bewertungen
- Introd. Campos - Dev - Ms. PDFDokument32 SeitenIntrod. Campos - Dev - Ms. PDFJason SuxeNoch keine Bewertungen
- Electrónica de PotenciaDokument214 SeitenElectrónica de PotenciaAndrew VargasNoch keine Bewertungen
- Ensayo Electronica de PotenciaDokument4 SeitenEnsayo Electronica de PotenciaAlfonso Aguilar FuentesNoch keine Bewertungen
- PC2 Ee532 - Fiee UniDokument12 SeitenPC2 Ee532 - Fiee UniDavidNoch keine Bewertungen
- ELO386 Tarea 3 Comportamiento Dinamico Maquina InduccionDokument6 SeitenELO386 Tarea 3 Comportamiento Dinamico Maquina InduccionЕстеьан АрриагадаNoch keine Bewertungen
- Modelado de Un Motor DCDokument5 SeitenModelado de Un Motor DCDiego Armando VelasquezNoch keine Bewertungen
- R Rectificacion Diodos Practicas para Imprimir-2-21Dokument9 SeitenR Rectificacion Diodos Practicas para Imprimir-2-21Cristhian EspinosaNoch keine Bewertungen
- Informe Previo 2Dokument5 SeitenInforme Previo 2Kevin Torres OblitasNoch keine Bewertungen
- Mae 2019 Laboratorio6 Arranque Accionamientos MTI PDFDokument11 SeitenMae 2019 Laboratorio6 Arranque Accionamientos MTI PDFguFi69Noch keine Bewertungen
- Acciona 5Dokument31 SeitenAcciona 5Roberto CanqueNoch keine Bewertungen
- Sesion1 Nociones de Estabilidad SEPsDokument35 SeitenSesion1 Nociones de Estabilidad SEPsAngy Bravo OrtegaNoch keine Bewertungen
- Mat 121 MF Documento Base U1 Online PDFDokument37 SeitenMat 121 MF Documento Base U1 Online PDFpruebaprueba124Noch keine Bewertungen
- Modulación PWM Aplicada A Inversores TrifásicoDokument24 SeitenModulación PWM Aplicada A Inversores Trifásicoelarcito007100% (1)
- 1º Bachillerato PDFDokument4 Seiten1º Bachillerato PDFEnzo Karol VelásquezNoch keine Bewertungen
- Apuntes de Maquinas Electric AsDokument139 SeitenApuntes de Maquinas Electric AsalberheryahooNoch keine Bewertungen
- Clase 02 Maquinas DC PDFDokument19 SeitenClase 02 Maquinas DC PDFEnzo Karol VelásquezNoch keine Bewertungen
- Tema 8 Amortización PDFDokument4 SeitenTema 8 Amortización PDFEnzo Karol VelásquezNoch keine Bewertungen
- Clase 00 InformacionDokument7 SeitenClase 00 InformacionEnzo Karol VelásquezNoch keine Bewertungen
- GuíaDokument51 SeitenGuíaEnzo Karol VelásquezNoch keine Bewertungen
- Detroit ChileDivisión Motores - Detroit ChileDokument6 SeitenDetroit ChileDivisión Motores - Detroit ChileEnzo Karol VelásquezNoch keine Bewertungen
- GuíaDokument51 SeitenGuíaEnzo Karol VelásquezNoch keine Bewertungen
- Circuitos Con Realimentacion Negativa Amp OpDokument30 SeitenCircuitos Con Realimentacion Negativa Amp OpelectroliticoNoch keine Bewertungen
- Tabla Propiedades y T de LaplaceDokument41 SeitenTabla Propiedades y T de LaplaceEnzo Karol VelásquezNoch keine Bewertungen
- Tabla de TransformadaDokument1 SeiteTabla de TransformadaRonald Orellano MNoch keine Bewertungen
- Willkommen in Deutschland EsDokument131 SeitenWillkommen in Deutschland EsjaNoch keine Bewertungen
- L6019022dstbai808597 PDFDokument154 SeitenL6019022dstbai808597 PDFEnzo Karol VelásquezNoch keine Bewertungen
- Willkommen in Deutschland EsDokument131 SeitenWillkommen in Deutschland EsjaNoch keine Bewertungen
- GuíaDokument51 SeitenGuíaEnzo Karol VelásquezNoch keine Bewertungen
- Tarea3 ELO386 2011Dokument1 SeiteTarea3 ELO386 2011Enzo Karol VelásquezNoch keine Bewertungen
- GuíaDokument51 SeitenGuíaEnzo Karol VelásquezNoch keine Bewertungen
- Elo384 - Capitulo 7bDokument25 SeitenElo384 - Capitulo 7bEnzo Karol VelásquezNoch keine Bewertungen
- Control VectorialDokument62 SeitenControl VectorialEnzo Karol VelásquezNoch keine Bewertungen
- Apuntes de Maquinas Electric AsDokument139 SeitenApuntes de Maquinas Electric AsalberheryahooNoch keine Bewertungen
- Tarea 6 FMF 023Dokument5 SeitenTarea 6 FMF 023Enzo Karol VelásquezNoch keine Bewertungen
- Ipd 416Dokument1 SeiteIpd 416Enzo Karol VelásquezNoch keine Bewertungen
- Clase 02 Maquinas DCDokument19 SeitenClase 02 Maquinas DCEnzo Karol VelásquezNoch keine Bewertungen
- Clase 00 InformacionDokument7 SeitenClase 00 InformacionEnzo Karol VelásquezNoch keine Bewertungen
- Six SigmaDokument12 SeitenSix SigmalavisitantemisteriosaNoch keine Bewertungen
- Modelo de Estilos de Aprendizaje de Felder y SilvermanDokument7 SeitenModelo de Estilos de Aprendizaje de Felder y SilvermanJeannette CañutaNoch keine Bewertungen
- Compendiocompleto 160628000335Dokument401 SeitenCompendiocompleto 160628000335Micaela Flores LanzaNoch keine Bewertungen
- SINONIMIADokument4 SeitenSINONIMIAAldahir Alexis Mendoza CastilloNoch keine Bewertungen
- Packet Tracer - Configurar Una Red Inalámbrica: ObjetivosDokument8 SeitenPacket Tracer - Configurar Una Red Inalámbrica: ObjetivosNICOL BRIGIETH RIOS HOYOSNoch keine Bewertungen
- Replicación ViralDokument6 SeitenReplicación ViralAna VázquezNoch keine Bewertungen
- Relación IntraarcadaDokument20 SeitenRelación Intraarcadacamila0% (1)
- DABOTEWBPD2WDokument14 SeitenDABOTEWBPD2Wvideoric8867Noch keine Bewertungen
- Unidad 1. La Actividad Comercial de Las EmpresasDokument4 SeitenUnidad 1. La Actividad Comercial de Las EmpresasbeatriztalaNoch keine Bewertungen
- Tarea Lección 2 Resumen AnaliticoDokument10 SeitenTarea Lección 2 Resumen Analiticojaime perezNoch keine Bewertungen
- Hay Me Duele El Buen Dr.Dokument20 SeitenHay Me Duele El Buen Dr.Fredy TintayaNoch keine Bewertungen
- Instruction Manual Weighing Indicator Ti-500 E.en - EsDokument19 SeitenInstruction Manual Weighing Indicator Ti-500 E.en - EsEDUARDO HERNANDEZ100% (2)
- CharlaeEgresado UNALMDokument22 SeitenCharlaeEgresado UNALMRoxana DíazNoch keine Bewertungen
- Examen de Recursos Humanos FinalDokument13 SeitenExamen de Recursos Humanos FinalLeda Mora Bogantes0% (1)
- PR301-01A3 Manual de Instrucciones v01Dokument42 SeitenPR301-01A3 Manual de Instrucciones v01Jay Cee RizoNoch keine Bewertungen
- Definición de La RedundanciaDokument2 SeitenDefinición de La RedundanciaNissi LagoNoch keine Bewertungen
- Niif Seccion 22Dokument4 SeitenNiif Seccion 22Gloria Milena DIAZ ROZO50% (2)
- Recetario Ensaladas de Verano PDFDokument21 SeitenRecetario Ensaladas de Verano PDFLaurasanzgarcia23Noch keine Bewertungen
- UsbFix ReportDokument6 SeitenUsbFix ReportRoss Mery CMNoch keine Bewertungen
- Potencial ElectricoDokument15 SeitenPotencial ElectricoVictor Castro :vNoch keine Bewertungen
- MAPA MENTAL Sociologia y PsicologiaDokument1 SeiteMAPA MENTAL Sociologia y PsicologiaAlejandra QuinteroNoch keine Bewertungen
- La HormesisDokument7 SeitenLa HormesisKanmen QingNoch keine Bewertungen
- Cómo Aplicamos La Antropología en La Experiencia de UsuarioDokument5 SeitenCómo Aplicamos La Antropología en La Experiencia de UsuarioKirvis MendezNoch keine Bewertungen
- Módulo #7. Tabla Periódica y Propiedades Periódicas.Dokument20 SeitenMódulo #7. Tabla Periódica y Propiedades Periódicas.Consultores LegalesNoch keine Bewertungen
- Caracteristicas de La Industria QuimicaDokument22 SeitenCaracteristicas de La Industria Quimicaprincesslove521_4165Noch keine Bewertungen
- Taller Mecanico Informe CascoDokument14 SeitenTaller Mecanico Informe CascoAriel ChafuelanNoch keine Bewertungen
- Tesis Doctoral Valoracion de La Satisfaccion, El Desempeño y La Imagen Del Destino Por Los Guias de TurismoDokument255 SeitenTesis Doctoral Valoracion de La Satisfaccion, El Desempeño y La Imagen Del Destino Por Los Guias de TurismomidumeNoch keine Bewertungen
- Historia de La Contabilidad-Lucy HernandezDokument2 SeitenHistoria de La Contabilidad-Lucy HernandezLUCY CRISTINA HERNANDEZ URIASNoch keine Bewertungen
- RD 091 2020 Minem DgaamDokument3 SeitenRD 091 2020 Minem DgaamManuel MirandaNoch keine Bewertungen