Das könnte Ihnen auch gefallen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Binary Code Vulnerability Detection Based On Multi-Level Feature FusionDokument12 SeitenBinary Code Vulnerability Detection Based On Multi-Level Feature FusionRADHAKRISHNA SASTRY PUDIPEDDINoch keine Bewertungen
- 93C66 PDFDokument22 Seiten93C66 PDFCristian Esteban TamashiroNoch keine Bewertungen
- Addressing Modes 8051Dokument37 SeitenAddressing Modes 80514SI21EC037 MONOJ S BNoch keine Bewertungen
- ATmega 328 PDokument17 SeitenATmega 328 PEduardo SantosNoch keine Bewertungen
- COA KCS-302 Model Question Paper: Computer Organization & Architecture (Dr. A.P.J. Abdul Kalam Technical University)Dokument3 SeitenCOA KCS-302 Model Question Paper: Computer Organization & Architecture (Dr. A.P.J. Abdul Kalam Technical University)Piyush GuptaNoch keine Bewertungen
- COA GTU Study Material Presentations Unit-2 15012020080815AMDokument65 SeitenCOA GTU Study Material Presentations Unit-2 15012020080815AMJanvi PatelNoch keine Bewertungen
- PIC 16f877a Bit Control InstructionsDokument14 SeitenPIC 16f877a Bit Control InstructionssjaradatNoch keine Bewertungen
- Chapter - 04 Mips Assembly Data PathDokument137 SeitenChapter - 04 Mips Assembly Data PathAbubakar sabirNoch keine Bewertungen
- Dlca - 1Dokument20 SeitenDlca - 1Department of IT, AITSNoch keine Bewertungen
- Assembly First ExamDokument4 SeitenAssembly First ExamDu B TramNoch keine Bewertungen
- Arch Module Final-1Dokument148 SeitenArch Module Final-1Elijah IbsaNoch keine Bewertungen
- Visualmotion 6.0: RexrothDokument216 SeitenVisualmotion 6.0: RexrothDavid SalaNoch keine Bewertungen
- Parallel and Distributed IR: Eric BrownDokument24 SeitenParallel and Distributed IR: Eric BrownSuvetha SenguttuvanNoch keine Bewertungen
- ArbitrumDokument18 SeitenArbitrumAbhay MalikNoch keine Bewertungen
- GOL 8 DocumentationDokument6 SeitenGOL 8 Documentationniklas shethNoch keine Bewertungen
- dm00516256 stm32mp151x3x7x Device Errata StmicroelectronicsDokument45 Seitendm00516256 stm32mp151x3x7x Device Errata StmicroelectronicsBenyamin Farzaneh AghajarieNoch keine Bewertungen
- (NagpurStudents - Org) Computer Architecture and Organization 1Dokument4 Seiten(NagpurStudents - Org) Computer Architecture and Organization 1Saurabh GhuteNoch keine Bewertungen
- Code Optimization Sept. 25, 2003: "The Course That Gives CMU Its Zip!"Dokument57 SeitenCode Optimization Sept. 25, 2003: "The Course That Gives CMU Its Zip!"abesalok123Noch keine Bewertungen
- ACE-ACADEMY-EE-SET-A-2020 (Gate2016.info)Dokument38 SeitenACE-ACADEMY-EE-SET-A-2020 (Gate2016.info)Ajay GoelNoch keine Bewertungen
- Chapter - 2: Basic Computer Organization and DesignDokument74 SeitenChapter - 2: Basic Computer Organization and Designketulmp0% (1)
- F Computer Architecture and Organization CSE205 F1-2Dokument4 SeitenF Computer Architecture and Organization CSE205 F1-2Akash SharmaNoch keine Bewertungen
- Superscalar and Super Pipelined ProcessorsDokument3 SeitenSuperscalar and Super Pipelined ProcessorsSharathMenonNoch keine Bewertungen
- Module 01 Introduction To MicroprocessorsDokument26 SeitenModule 01 Introduction To MicroprocessorsJASPER PAYAPAYANoch keine Bewertungen
- Adekunle Ajasin Univeristy Akungba AkokoDokument25 SeitenAdekunle Ajasin Univeristy Akungba AkokoDaniel EmekaNoch keine Bewertungen
- Chapter2 MicroprocessorDokument95 SeitenChapter2 MicroprocessorsagarNoch keine Bewertungen
- MPMC Print PDFDokument185 SeitenMPMC Print PDFvictor kNoch keine Bewertungen
- Assignment ESDokument4 SeitenAssignment ESBhavana H NNoch keine Bewertungen
- Architecture and Programming of 8051 MCU's: 1.1 What Are Microcontrollers and What Are They Used For?Dokument11 SeitenArchitecture and Programming of 8051 MCU's: 1.1 What Are Microcontrollers and What Are They Used For?JosephPaulNoch keine Bewertungen
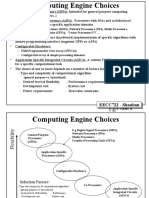
- EECC722 - ShaabanDokument101 SeitenEECC722 - ShaabanAditya JagtapNoch keine Bewertungen
- HCS12 Controller-2Dokument20 SeitenHCS12 Controller-2HaxfNoch keine Bewertungen