Das könnte Ihnen auch gefallen
- Coleccion de Plantillas de Excel Donde Se Muestra Excel Avanzado VBADokument23 SeitenColeccion de Plantillas de Excel Donde Se Muestra Excel Avanzado VBAAlfonso Aguilar100% (1)
- SAP ISU CCS - Mapa de Relacionamento de Tabelas StandardDokument1 SeiteSAP ISU CCS - Mapa de Relacionamento de Tabelas StandardNor Moampaio0% (2)
- Capacitación Seguridad de Informació-PNPDokument83 SeitenCapacitación Seguridad de Informació-PNPRafael Antonio Pérez LlorcaNoch keine Bewertungen
- Ins-m2-Xxxx Liberacion de MaquinasDokument4 SeitenIns-m2-Xxxx Liberacion de MaquinasFrankMartinezNoch keine Bewertungen
- Asignacion 9Dokument3 SeitenAsignacion 9DANIELNoch keine Bewertungen
- GFP - Notas de Clase - MÓDULO2 (2021!07!29)Dokument53 SeitenGFP - Notas de Clase - MÓDULO2 (2021!07!29)DANIELNoch keine Bewertungen
- Asignacion 10Dokument18 SeitenAsignacion 10DANIELNoch keine Bewertungen
- 20171212110005Dokument131 Seiten20171212110005Fernando QuirozNoch keine Bewertungen
- Brazo RoboticoDokument20 SeitenBrazo RoboticoDANIELNoch keine Bewertungen
- Figura 1 CNCDokument1 SeiteFigura 1 CNCDANIELNoch keine Bewertungen
- Hoja Datos Figura 1Dokument3 SeitenHoja Datos Figura 1DANIELNoch keine Bewertungen
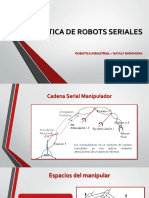
- Cinemática de Robots SerialesDokument40 SeitenCinemática de Robots SerialesDANIELNoch keine Bewertungen
- Taller de Repaso Robotica IndustrialDokument2 SeitenTaller de Repaso Robotica IndustrialDANIELNoch keine Bewertungen
- Lab 3Dokument13 SeitenLab 3DANIELNoch keine Bewertungen
- Documento 180209035723Dokument20 SeitenDocumento 180209035723DANIELNoch keine Bewertungen
- Documento 180209035723Dokument20 SeitenDocumento 180209035723DANIELNoch keine Bewertungen
- Figura 1 CNCDokument1 SeiteFigura 1 CNCDANIELNoch keine Bewertungen
- Figura 1 CNCDokument8 SeitenFigura 1 CNCDANIELNoch keine Bewertungen
- Traducir AnyDokument4 SeitenTraducir AnyDANIELNoch keine Bewertungen
- Pocket Segunda HoraDokument1 SeitePocket Segunda HoraDANIELNoch keine Bewertungen
- Diseño Mecatronico OkDokument11 SeitenDiseño Mecatronico OkDANIELNoch keine Bewertungen
- Actividad 8 A 10Dokument10 SeitenActividad 8 A 10DANIELNoch keine Bewertungen
- Diseño Mecatronico OkDokument11 SeitenDiseño Mecatronico OkDANIELNoch keine Bewertungen
- Exposicion Investigacion LeerDokument5 SeitenExposicion Investigacion LeerDANIELNoch keine Bewertungen
- Actividad 8 A 10Dokument1 SeiteActividad 8 A 10DANIELNoch keine Bewertungen
- Actividad 8 A 10 PDFDokument1 SeiteActividad 8 A 10 PDFDANIELNoch keine Bewertungen
- Pocket Primera HoraDokument1 SeitePocket Primera HoraDANIELNoch keine Bewertungen
- Explicacion 6 A 8Dokument1 SeiteExplicacion 6 A 8DANIELNoch keine Bewertungen
- Taladrado MCXDokument1 SeiteTaladrado MCXDANIELNoch keine Bewertungen
- Figura 1 CNCDokument1 SeiteFigura 1 CNCDANIELNoch keine Bewertungen
- RimDokument2 SeitenRimDANIELNoch keine Bewertungen
- COMO configurar un servidor espejo usando rsyncDokument10 SeitenCOMO configurar un servidor espejo usando rsyncJaime GarciaNoch keine Bewertungen
- Sistema Gestor de Base de Datos PostgreSQLDokument3 SeitenSistema Gestor de Base de Datos PostgreSQLboyprimeravez2Noch keine Bewertungen
- Silabo Metodos Computacionales de La Fisica 2019BDokument6 SeitenSilabo Metodos Computacionales de La Fisica 2019BGONZALES SALAZAR DIEGO ALONZONoch keine Bewertungen
- Transformación DigitalDokument1 SeiteTransformación DigitalProdujav AlamorNoch keine Bewertungen
- Informe de Tipos de Bases de DatosDokument5 SeitenInforme de Tipos de Bases de DatosCALEB KISEL TABOADANoch keine Bewertungen
- 5 programas Office más importantes y su utilidadDokument2 Seiten5 programas Office más importantes y su utilidadErica PuelloNoch keine Bewertungen
- Trabajo tr1 de RED HATDokument16 SeitenTrabajo tr1 de RED HATArmando Salvador SolisNoch keine Bewertungen
- Mar 1 MicroarrangerDokument244 SeitenMar 1 Microarrangerhernan001Noch keine Bewertungen
- Cuestionario de CiberseguridadDokument22 SeitenCuestionario de CiberseguridadCamilo CaucayoNoch keine Bewertungen
- SistemasOperativos-ComunicaciónProcesosDokument19 SeitenSistemasOperativos-ComunicaciónProcesosaaron reinosoNoch keine Bewertungen
- CVJJODDokument1 SeiteCVJJODJuvence Jaramillo OlveraNoch keine Bewertungen
- GereDokument36 SeitenGereGuillermo VillalonNoch keine Bewertungen
- Conceptos Básicos Del Flujo de TrabajoDokument6 SeitenConceptos Básicos Del Flujo de Trabajojperez3kNoch keine Bewertungen
- Pasos de Instalacion CorrectaDokument19 SeitenPasos de Instalacion CorrectaDaniel HerreraNoch keine Bewertungen
- Renta PC LtdaDokument2 SeitenRenta PC LtdaPARA ESTUDIAR100% (1)
- Operaciones Que Se Pueden Realizar en Virtual BoxDokument19 SeitenOperaciones Que Se Pueden Realizar en Virtual BoxLuz Adriana Garrido LopezNoch keine Bewertungen
- Software y Servicios de InternetDokument1 SeiteSoftware y Servicios de InternetMarcos Gutierrez ColonNoch keine Bewertungen
- S11P Analisis Estadistico en StatgraphicsDokument42 SeitenS11P Analisis Estadistico en StatgraphicscarlosNoch keine Bewertungen
- Tipos de Licenciamiento de SoftwareDokument2 SeitenTipos de Licenciamiento de SoftwareErickNoch keine Bewertungen
- Revision C MerinoDokument26 SeitenRevision C MerinoAnonymous 41DhRdNoch keine Bewertungen
- Asesoria Nacional CNCDokument53 SeitenAsesoria Nacional CNCGREGORIO HERNANDEZNoch keine Bewertungen
- Distribuidor especializado en material fotovoltaicoDokument44 SeitenDistribuidor especializado en material fotovoltaicoDavidCirianoNoch keine Bewertungen
- Notebook ASUS Expertbook B1500CEAEDokument2 SeitenNotebook ASUS Expertbook B1500CEAERobert Anderson Ordóñez BautistaNoch keine Bewertungen
- Manual Win ISISDokument447 SeitenManual Win ISISEl Gato Con BotasNoch keine Bewertungen
- Luz 112Dokument2 SeitenLuz 112Fabiana DelgadoNoch keine Bewertungen
- Gta Setimo 7° Les Matériels Scolaires Et La Salle de ClasseDokument6 SeitenGta Setimo 7° Les Matériels Scolaires Et La Salle de Classethomasankama113Noch keine Bewertungen