Das könnte Ihnen auch gefallen
- Classical Kinematis CHP 1-14Dokument95 SeitenClassical Kinematis CHP 1-14kullayot suwantarojNoch keine Bewertungen
- Guide to Load Analysis for Durability in Vehicle EngineeringVon EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonBewertung: 4 von 5 Sternen4/5 (1)
- Chapter 7 - FEMDokument34 SeitenChapter 7 - FEMpaivensolidsnake100% (1)
- Limit and Fit Data BooDokument18 SeitenLimit and Fit Data Booविशाल पुडासैनीNoch keine Bewertungen
- Fabrication Hollow Fiber MembraneDokument5 SeitenFabrication Hollow Fiber MembraneDodi AfandiNoch keine Bewertungen
- Design and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainVon EverandDesign and Analysis of Composite Structures for Automotive Applications: Chassis and DrivetrainNoch keine Bewertungen
- Advances in Engineering Plasticity and its ApplicationsVon EverandAdvances in Engineering Plasticity and its ApplicationsW.B. LeeNoch keine Bewertungen
- Introduction To GDDokument8 SeitenIntroduction To GDCatalin FinkelsteinNoch keine Bewertungen
- Modeling and Analysis of Passive Vibration Isolation SystemsVon EverandModeling and Analysis of Passive Vibration Isolation SystemsNoch keine Bewertungen
- Kinematics of Machinery Unit 1Dokument100 SeitenKinematics of Machinery Unit 1Harinath GowdNoch keine Bewertungen
- ME8492 Important Questions and AnswersDokument123 SeitenME8492 Important Questions and Answersyuvaraj gopalNoch keine Bewertungen
- A Parametric Study of The Dynamics of The Shudderlesss Tripode JointDokument9 SeitenA Parametric Study of The Dynamics of The Shudderlesss Tripode Jointbee140676Noch keine Bewertungen
- 234 DesignDokument6 Seiten234 DesignCardo dalisayNoch keine Bewertungen
- Methods of Functional Analysis for Application in Solid MechanicsVon EverandMethods of Functional Analysis for Application in Solid MechanicsNoch keine Bewertungen
- Friction Clutches mmc1 April 20 2011Dokument24 SeitenFriction Clutches mmc1 April 20 2011Shyam GupthaNoch keine Bewertungen
- Advanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994Von EverandAdvanced Computational and Design Techniques in Applied Electromagnetic Systems: Proceedings of the International ISEM Symposium on Advanced Computational and Design Techniques in Applied Electromagnetic Systems, Seoul, Korea, 22-24 June, 1994Noch keine Bewertungen
- Unit 2 and 3 Mechanics of MachinesDokument21 SeitenUnit 2 and 3 Mechanics of MachinesYogaraja JeyarajNoch keine Bewertungen
- 9A14402 Theory of MachinesDokument8 Seiten9A14402 Theory of MachinessivabharathamurthyNoch keine Bewertungen
- Mechanisms: Kinematic Analysis and Applications in RoboticsVon EverandMechanisms: Kinematic Analysis and Applications in RoboticsNoch keine Bewertungen
- Slider Crank Mechanism (AutoRecovered)Dokument6 SeitenSlider Crank Mechanism (AutoRecovered)Jàwád QûreShïNoch keine Bewertungen
- DOM Full Notes PDFDokument263 SeitenDOM Full Notes PDFCHAMAN R100% (1)
- Mechanisms of Machinery: Contents and ChaptersDokument394 SeitenMechanisms of Machinery: Contents and ChaptersMatiyas JoteNoch keine Bewertungen
- Analysis of Rotor Blades Using FEMDokument19 SeitenAnalysis of Rotor Blades Using FEMLakshman ReddyNoch keine Bewertungen
- Adaptive Design of Machine Tool GearboxesDokument9 SeitenAdaptive Design of Machine Tool Gearboxesأحمد دعبسNoch keine Bewertungen
- Scheduling and Control of FmsDokument22 SeitenScheduling and Control of FmsAbhishek ChadagaNoch keine Bewertungen
- Matrix Completions, Moments, and Sums of Hermitian SquaresVon EverandMatrix Completions, Moments, and Sums of Hermitian SquaresBewertung: 5 von 5 Sternen5/5 (1)
- Unit 1Dokument54 SeitenUnit 1Anbu Selvan0% (1)
- Matrix Methods Applied to Engineering Rigid Body MechanicsVon EverandMatrix Methods Applied to Engineering Rigid Body MechanicsNoch keine Bewertungen
- Kinematics and Dynamics of Machinery Lab ManualDokument63 SeitenKinematics and Dynamics of Machinery Lab ManualsaranNoch keine Bewertungen
- Me 6603 - Finite Element Analysis: Part A Questions With Answers Unit 1Dokument14 SeitenMe 6603 - Finite Element Analysis: Part A Questions With Answers Unit 1Karthik SubramaniNoch keine Bewertungen
- Machine Element II Chapter SummaryDokument39 SeitenMachine Element II Chapter SummaryAbiy Aliye100% (1)
- Chosen Problems and Their Final Solutions of Chap. 1 (Waldron)Dokument7 SeitenChosen Problems and Their Final Solutions of Chap. 1 (Waldron)Fuu HouHouNoch keine Bewertungen
- Finite Element Solution of Boundary Value Problems: Theory and ComputationVon EverandFinite Element Solution of Boundary Value Problems: Theory and ComputationNoch keine Bewertungen
- Machine design philosophy and procedure considerationsDokument20 SeitenMachine design philosophy and procedure considerationsS VNoch keine Bewertungen
- Lecture 4 - Design For Variable LoadingDokument37 SeitenLecture 4 - Design For Variable LoadingHafiz AbdulRehmanNoch keine Bewertungen
- Machine Tool Engineering DesignDokument34 SeitenMachine Tool Engineering DesignAshok Kumar UppariNoch keine Bewertungen
- Nonlinear Ordinary Differential Equations in Transport ProcessesVon EverandNonlinear Ordinary Differential Equations in Transport ProcessesNoch keine Bewertungen
- Mechanics of Machines - VibrationDokument34 SeitenMechanics of Machines - VibrationGiovani Carpin100% (1)
- Kinematics Lab Manual GuideDokument18 SeitenKinematics Lab Manual Guideshailendra_236Noch keine Bewertungen
- @front MatterDokument9 Seiten@front Matterjacket64Noch keine Bewertungen
- Strength of Material - Torsion of Round BarsDokument7 SeitenStrength of Material - Torsion of Round Barsfangyingtee25Noch keine Bewertungen
- Report On Four Bar Mechanism of Sewing MachineDokument8 SeitenReport On Four Bar Mechanism of Sewing MachineshazedislamNoch keine Bewertungen
- 02 Design of Clutch and BrakesDokument29 Seiten02 Design of Clutch and BrakesCholan PillaiNoch keine Bewertungen
- Differential Transformation Method for Mechanical Engineering ProblemsVon EverandDifferential Transformation Method for Mechanical Engineering ProblemsNoch keine Bewertungen
- ANSYS Workbench 2023 R2: A Tutorial Approach, 6th EditionVon EverandANSYS Workbench 2023 R2: A Tutorial Approach, 6th EditionNoch keine Bewertungen
- Design and Analysis of Single Plate ClutchDokument3 SeitenDesign and Analysis of Single Plate ClutchChandra Sekar100% (1)
- Static Analysis of A Bycycle FrameDokument24 SeitenStatic Analysis of A Bycycle FrameADARSH SINGHNoch keine Bewertungen
- Untitled 22Dokument2 SeitenUntitled 22duraiprakash83Noch keine Bewertungen
- Math Competition Winners Grade 1 To 3Dokument2 SeitenMath Competition Winners Grade 1 To 3duraiprakash83Noch keine Bewertungen
- FEM Handout Chapter 3Dokument21 SeitenFEM Handout Chapter 3duraiprakash83Noch keine Bewertungen
- OptimizationDokument11 SeitenOptimizationduraiprakash83Noch keine Bewertungen
- Advanced Fluid Power Systems CourseDokument4 SeitenAdvanced Fluid Power Systems Courseduraiprakash83Noch keine Bewertungen
- Optimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsDokument10 SeitenOptimality Conditions: Unconstrained Optimization: 1.1 Differentiable ProblemsmaryNoch keine Bewertungen
- Hindawi Template guide for authorsDokument5 SeitenHindawi Template guide for authorsFarah Farhana MarenNoch keine Bewertungen
- Lecture 3Dokument48 SeitenLecture 3duraiprakash83Noch keine Bewertungen
- Labyrinth Chaos: Department of Physics, University of Wisconsin, 1150 University Avenue, Madison, WI 53706, USADokument32 SeitenLabyrinth Chaos: Department of Physics, University of Wisconsin, 1150 University Avenue, Madison, WI 53706, USAduraiprakash83Noch keine Bewertungen
- Facinating WordsDokument2 SeitenFacinating Wordsduraiprakash83Noch keine Bewertungen
- Chapter 1 - Fundamental of OptimizationDokument23 SeitenChapter 1 - Fundamental of Optimizationduraiprakash83Noch keine Bewertungen
- Chapter 2 SummaryDokument17 SeitenChapter 2 Summaryduraiprakash83Noch keine Bewertungen
- 01 Introduction 2nd Order Systems PDFDokument31 Seiten01 Introduction 2nd Order Systems PDFAmit KumarNoch keine Bewertungen
- 1 Strange AttractorsDokument28 Seiten1 Strange Attractorsduraiprakash83Noch keine Bewertungen
- Theory of Mechanism Lecture DECDokument51 SeitenTheory of Mechanism Lecture DECduraiprakash83Noch keine Bewertungen
- Worksheet 323Dokument5 SeitenWorksheet 323duraiprakash83Noch keine Bewertungen
- Advanced Vibrations Theory As Per Text Book - COURSE OUTLINEDokument6 SeitenAdvanced Vibrations Theory As Per Text Book - COURSE OUTLINEduraiprakash83Noch keine Bewertungen
- AUE Tech Report 2017Dokument11 SeitenAUE Tech Report 2017duraiprakash83Noch keine Bewertungen
- LabView CourseDokument35 SeitenLabView Courseduraiprakash83Noch keine Bewertungen
- Understanding Complex Issues Through Careful AnalysisDokument2 SeitenUnderstanding Complex Issues Through Careful Analysisduraiprakash83Noch keine Bewertungen
- Continuous Random Variables and Their PropertiesDokument91 SeitenContinuous Random Variables and Their PropertiesJeff HardyNoch keine Bewertungen
- Experimental Facilities For Research ScholarDokument8 SeitenExperimental Facilities For Research Scholarduraiprakash83Noch keine Bewertungen
- Mech Vibration LabDokument18 SeitenMech Vibration LabAbhinavTiwariNoch keine Bewertungen
- Mechanical Vibration Worksheet SolutionDokument11 SeitenMechanical Vibration Worksheet Solutionduraiprakash83Noch keine Bewertungen
- Vibration Mid ExamDokument10 SeitenVibration Mid Examduraiprakash83Noch keine Bewertungen
- Reliability Case StudyDokument14 SeitenReliability Case Studyduraiprakash83Noch keine Bewertungen
- Mechanical Vibration WorksheetDokument6 SeitenMechanical Vibration Worksheetduraiprakash83Noch keine Bewertungen
- Worksheet 1Dokument1 SeiteWorksheet 1duraiprakash83Noch keine Bewertungen
- Fantastic TripDokument68 SeitenFantastic Tripabiramikdevi100% (17)
- Sensor de Flujo Referencia System Sensor A05-0180Dokument2 SeitenSensor de Flujo Referencia System Sensor A05-0180mono2072Noch keine Bewertungen
- Marinediesel Duramax 300 HP 500 HPDokument2 SeitenMarinediesel Duramax 300 HP 500 HPMaurizio BernasconiNoch keine Bewertungen
- HHF-1600L Drilling Pump (Main Body) User ManualDokument61 SeitenHHF-1600L Drilling Pump (Main Body) User ManualAhmed Saeed100% (2)
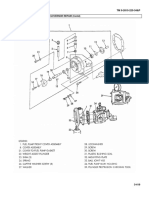
- 3-61. Fuel Pump Front Cover and Governor Repair (Contd)Dokument54 Seiten3-61. Fuel Pump Front Cover and Governor Repair (Contd)Влад БеломестновNoch keine Bewertungen
- Catalogo Rodamiento Axial Crapodina NSKDokument18 SeitenCatalogo Rodamiento Axial Crapodina NSKMiguel Angel AguirreNoch keine Bewertungen
- 04-Coupling 304 Motor-Gear PDFDokument12 Seiten04-Coupling 304 Motor-Gear PDFManuel Díaz VilloutaNoch keine Bewertungen
- Manual Del Motor Aeronautico LycomingDokument80 SeitenManual Del Motor Aeronautico LycomingWalter Gutierrez100% (2)
- Critical engineering watch informationDokument100 SeitenCritical engineering watch informationRj DeciertoNoch keine Bewertungen
- Caterpilar C175-16 - Project Guide - LEBW0010-00 PDFDokument83 SeitenCaterpilar C175-16 - Project Guide - LEBW0010-00 PDFsfdsdfsf50% (2)
- 8127280a002 GBDokument129 Seiten8127280a002 GBLuci Lucian100% (3)
- Valbia Actuator SetupDokument1 SeiteValbia Actuator SetupkikinNoch keine Bewertungen
- MAPÚA UNIVERSITY LABORATORIES AND THEIR FUNCTIONSDokument21 SeitenMAPÚA UNIVERSITY LABORATORIES AND THEIR FUNCTIONSnet fliNoch keine Bewertungen
- ABB Motor (IE4)Dokument1 SeiteABB Motor (IE4)Lee DerekNoch keine Bewertungen
- Camless Two Stroke Main Propulsion engine-B&W ME - CDokument21 SeitenCamless Two Stroke Main Propulsion engine-B&W ME - CNarayana Prakash96% (52)
- Troubleshooting Rub Marks in A Centrifugal PumpDokument4 SeitenTroubleshooting Rub Marks in A Centrifugal Pumpابو المعالي الهمامNoch keine Bewertungen
- Honda Project ReportDokument35 SeitenHonda Project ReportSube Singh Insan100% (1)
- Ducati WiringDokument7 SeitenDucati WiringRyan LeisNoch keine Bewertungen
- Ecomat Opertors ManualDokument36 SeitenEcomat Opertors Manualryanswj50% (2)
- Operating & Maintenance manual-RM-290AC'J'Dokument33 SeitenOperating & Maintenance manual-RM-290AC'J'faqdaniNoch keine Bewertungen
- TM9-1765A Ordnance Maintenance Axles Etc. Bomb Truck M6 PDFDokument128 SeitenTM9-1765A Ordnance Maintenance Axles Etc. Bomb Truck M6 PDFdieudecafeNoch keine Bewertungen
- NGS Ipg 0001 PDFDokument16 SeitenNGS Ipg 0001 PDFRoderick WineNoch keine Bewertungen
- Asco Series 300 Ats Operators ManualDokument20 SeitenAsco Series 300 Ats Operators ManualGera Ortiz Martinez100% (1)
- Flanged Ball Bearing Catalog PDFDokument3 SeitenFlanged Ball Bearing Catalog PDFFreddy Enrique Torres OrtizNoch keine Bewertungen
- Hyster S40CPDokument247 SeitenHyster S40CPAlessandro de Oliveira100% (1)
- Seal Gas SystemsDokument2 SeitenSeal Gas Systemsdonald sinananNoch keine Bewertungen
- Sebm013001 PDFDokument140 SeitenSebm013001 PDFZT350100% (1)
- Product Recommendation Terex Access and Personel Platforms TA30ADokument1 SeiteProduct Recommendation Terex Access and Personel Platforms TA30AValmaq Prestação Serviço LdaNoch keine Bewertungen
- Jastram Model H Helm Pumps: Engineered For Life at SeaDokument2 SeitenJastram Model H Helm Pumps: Engineered For Life at SeaingdanilocfNoch keine Bewertungen
- BacklashDokument6 SeitenBacklashvishnuNoch keine Bewertungen
- Aexj0118 01Dokument2 SeitenAexj0118 01fatos_sejdajNoch keine Bewertungen