Das könnte Ihnen auch gefallen
- 5 B-H Curve PDFDokument9 Seiten5 B-H Curve PDFSanjib Baglari100% (1)
- Magnetic Hysteresis Tutorial: 4 of 6 (MHHTT46Dokument5 SeitenMagnetic Hysteresis Tutorial: 4 of 6 (MHHTT46atchyutakiran428Noch keine Bewertungen
- Magnetic HysteresisDokument5 SeitenMagnetic HysteresisMeita SukmaNoch keine Bewertungen
- B H CURVEDokument20 SeitenB H CURVEramshankar7038Noch keine Bewertungen
- HysteresisDokument24 SeitenHysteresisMohamedIsmailMohamedNoch keine Bewertungen
- Magnetic HysteresisDokument6 SeitenMagnetic Hysteresissameerpatel15770Noch keine Bewertungen
- Elmachi1 - Lecture2 (Review of Electromagnetics - Part 2)Dokument19 SeitenElmachi1 - Lecture2 (Review of Electromagnetics - Part 2)Trisha SARMIENTONoch keine Bewertungen
- Magnetic Intensity (H) :: Magnetic Flux Density (B)Dokument4 SeitenMagnetic Intensity (H) :: Magnetic Flux Density (B)KiranNoch keine Bewertungen
- FluctHydro HandoutDokument5 SeitenFluctHydro HandoutSayantik DalalNoch keine Bewertungen
- Lab Experiment - 3: Solid State Physics LabDokument12 SeitenLab Experiment - 3: Solid State Physics LabAman bansalNoch keine Bewertungen
- 10 GB Dongle Data @rs 350: Magnetic HysteresisDokument8 Seiten10 GB Dongle Data @rs 350: Magnetic Hysteresisrambabu_09cp037Noch keine Bewertungen
- Manual of B H CURVE 1 PDFDokument5 SeitenManual of B H CURVE 1 PDFRUDRA PRASAD MAHANANoch keine Bewertungen
- L5 Unit 1 Electrical TechnologyDokument5 SeitenL5 Unit 1 Electrical TechnologyDr G VijayakumarNoch keine Bewertungen
- Energy Conversion 1Dokument16 SeitenEnergy Conversion 1ramazan ÇelikelNoch keine Bewertungen
- Em4 Magnetic HysteresisDokument12 SeitenEm4 Magnetic HysteresisahumairNoch keine Bewertungen
- Helmholtz CalDokument7 SeitenHelmholtz CalSamir PatilNoch keine Bewertungen
- Ee201 Notes1 HoleyDokument47 SeitenEe201 Notes1 HoleyUmamaheswar ReddyNoch keine Bewertungen
- Magnetic Materials and Circuits: Describe, Explain and Calculate Fundamental of Electricity, Magnetism and CircuitsDokument56 SeitenMagnetic Materials and Circuits: Describe, Explain and Calculate Fundamental of Electricity, Magnetism and Circuitscarlos beltranNoch keine Bewertungen
- Magnetic CircuitDokument30 SeitenMagnetic CircuitSritaran BalakrishnanNoch keine Bewertungen
- 1 - Introduction To Magnetic CircuitsDokument26 Seiten1 - Introduction To Magnetic Circuitsxenohjb100% (1)
- Electrical MachinesDokument13 SeitenElectrical MachinesKim BalcuebaNoch keine Bewertungen
- Energy Conversion 3Dokument9 SeitenEnergy Conversion 3ramazan ÇelikelNoch keine Bewertungen
- Hysteresis Loop Reveals Magnetic PropertiesDokument4 SeitenHysteresis Loop Reveals Magnetic PropertiesAmit KapoorNoch keine Bewertungen
- Magnetism Uss PDFDokument12 SeitenMagnetism Uss PDFLashu ThierryNoch keine Bewertungen
- Introduction to Magnetochemistry in Transition Metal ComplexesDokument4 SeitenIntroduction to Magnetochemistry in Transition Metal Complexespeoples1231697Noch keine Bewertungen
- SSP Les: Hysteresis Loop TracerDokument16 SeitenSSP Les: Hysteresis Loop TracerRájéñdråChâry MåñthøjûNoch keine Bewertungen
- Magnetic PenetratingDokument100 SeitenMagnetic PenetratingjairajNoch keine Bewertungen
- Magnetic CircuitsDokument52 SeitenMagnetic Circuitsgopi_905100% (1)
- Mimay, Noeh M. Bsee - 2B Electromagnetics Tutorial Problem 62Dokument6 SeitenMimay, Noeh M. Bsee - 2B Electromagnetics Tutorial Problem 62Glorilie PazNoch keine Bewertungen
- DC MachinesDokument34 SeitenDC MachinesCristele Mae GarciaNoch keine Bewertungen
- Magnetochemistry Principles for Transition Metal ComplexesDokument7 SeitenMagnetochemistry Principles for Transition Metal ComplexesYousuf Raza100% (1)
- Magnetic Hysteresis: Experiment-164 SDokument13 SeitenMagnetic Hysteresis: Experiment-164 SChandra Prakash JainNoch keine Bewertungen
- FEE MicroprojectDokument10 SeitenFEE MicroprojectTushar MoreNoch keine Bewertungen
- Geophysical Techniques Lab Report:: HysteresisDokument7 SeitenGeophysical Techniques Lab Report:: HysteresisDeniz AkoumNoch keine Bewertungen
- AC/DC MACHINERY CHAPTER COMPILATIONDokument42 SeitenAC/DC MACHINERY CHAPTER COMPILATIONJohn A. CenizaNoch keine Bewertungen
- Magnetic Circuit AnalysisDokument61 SeitenMagnetic Circuit AnalysisFaqrie AziziNoch keine Bewertungen
- MagneticDokument14 SeitenMagneticNurulazmi Bin Abd RahmanNoch keine Bewertungen
- BEEE (Magnetic Circuits)Dokument7 SeitenBEEE (Magnetic Circuits)Vedu KadamNoch keine Bewertungen
- MagnetismDokument29 SeitenMagnetismkaviNoch keine Bewertungen
- Magnetic Hysteresis LoopDokument11 SeitenMagnetic Hysteresis Loopอัมพะวะผะลิน ตุ่นน้อย กินมะม่วงNoch keine Bewertungen
- Det1013 - Electrical Technology: Magnetic Circuit, Electromagnetism & Electromagnetic InductionDokument41 SeitenDet1013 - Electrical Technology: Magnetic Circuit, Electromagnetism & Electromagnetic InductionfaizNoch keine Bewertungen
- Magnetic Hysteresis Loop Theory & ExperimentDokument9 SeitenMagnetic Hysteresis Loop Theory & ExperimentFarazNoch keine Bewertungen
- Magnetic Flux Density and PermeabilityDokument10 SeitenMagnetic Flux Density and PermeabilityAlvaro De La CruzNoch keine Bewertungen
- Unit I (Magnetic Field and Circuits - Electromagnetic Force and Torque)Dokument43 SeitenUnit I (Magnetic Field and Circuits - Electromagnetic Force and Torque)UpasnaNoch keine Bewertungen
- Magnetism PHY 1101Dokument34 SeitenMagnetism PHY 1101Sakif IrtizaNoch keine Bewertungen
- MEKELLE UNIVERSITY ELECTRICAL ENGINEERING THESISDokument37 SeitenMEKELLE UNIVERSITY ELECTRICAL ENGINEERING THESISffffff100% (6)
- Magneto Transport MeasurementsDokument10 SeitenMagneto Transport MeasurementsB ToureNoch keine Bewertungen
- Magnetic Circuit PDFDokument41 SeitenMagnetic Circuit PDFAli Al-dulaimyNoch keine Bewertungen
- Magnetic Properties Using A Univ B-H Curve Tracer ExptDokument5 SeitenMagnetic Properties Using A Univ B-H Curve Tracer ExptLuyanda MnisiNoch keine Bewertungen
- Single Phase Transformer B-H LoopDokument9 SeitenSingle Phase Transformer B-H LoopSiddharth KumarNoch keine Bewertungen
- Complain Letter To DarazDokument4 SeitenComplain Letter To DarazasifNoch keine Bewertungen
- Lecture 3 Magnetic CircuitsDokument10 SeitenLecture 3 Magnetic CircuitsJojo KawayNoch keine Bewertungen
- Hall EffectDokument10 SeitenHall EffecttaruniisermNoch keine Bewertungen
- Det1013 - Electrical Technology: Magnetic Circuit, Electromagnetism & Electromagnetic InductionDokument46 SeitenDet1013 - Electrical Technology: Magnetic Circuit, Electromagnetism & Electromagnetic InductionSuhaila SharifNoch keine Bewertungen
- Magnetic Effect Full ChapterDokument17 SeitenMagnetic Effect Full ChaptervasanthiNoch keine Bewertungen
- Magnetic Fields, Special Relativity and Potential Theory: Elementary Electromagnetic TheoryVon EverandMagnetic Fields, Special Relativity and Potential Theory: Elementary Electromagnetic TheoryBewertung: 5 von 5 Sternen5/5 (1)
- Principles of Electric Methods in Surface and Borehole GeophysicsVon EverandPrinciples of Electric Methods in Surface and Borehole GeophysicsBewertung: 3 von 5 Sternen3/5 (1)
- Geophysical Field Theory and Method, Part B: Electromagnetic Fields IVon EverandGeophysical Field Theory and Method, Part B: Electromagnetic Fields INoch keine Bewertungen
- Principles and Practices of Molecular Properties: Theory, Modeling, and SimulationsVon EverandPrinciples and Practices of Molecular Properties: Theory, Modeling, and SimulationsNoch keine Bewertungen
- Principles of the Magnetic Methods in GeophysicsVon EverandPrinciples of the Magnetic Methods in GeophysicsBewertung: 2 von 5 Sternen2/5 (1)
- Tesla CarDokument24 SeitenTesla Carelptrek100% (8)
- Working Principle of An AlternatorDokument31 SeitenWorking Principle of An AlternatorDerrick Reyes0% (1)
- Wireless power transfer technologies and applicationsDokument189 SeitenWireless power transfer technologies and applicationsSubha DoloiNoch keine Bewertungen
- SGM3756 38V High Efficiency, Boost White LED Driver With PWM Dimming ControlDokument15 SeitenSGM3756 38V High Efficiency, Boost White LED Driver With PWM Dimming ControlCer CerNoch keine Bewertungen
- Question - Bank - Ee201Dokument16 SeitenQuestion - Bank - Ee201joydeep12Noch keine Bewertungen
- Measure Magnetic Fields Using a CoilDokument3 SeitenMeasure Magnetic Fields Using a CoilJashuva Reddy KalvaplliNoch keine Bewertungen
- APEC 2011 Seminar ACDC ACAC Final Inclusive Swiss Rectifier As Sent 010211Dokument268 SeitenAPEC 2011 Seminar ACDC ACAC Final Inclusive Swiss Rectifier As Sent 010211Cristian BandilaNoch keine Bewertungen
- An Introduction To Crystal FiltersDokument8 SeitenAn Introduction To Crystal FiltersmathurashwaniNoch keine Bewertungen
- Transformer Failure Due To Circuit-Breaker-Induced Switching TransientsDokument12 SeitenTransformer Failure Due To Circuit-Breaker-Induced Switching TransientsTaner ErtürkNoch keine Bewertungen
- Inductor DesignDokument10 SeitenInductor DesignMuthuRajNoch keine Bewertungen
- Drum BrakesDokument7 SeitenDrum BrakesZahir KhiraNoch keine Bewertungen
- A Technique For Improving Input Current Zero-Crossing Distortion of Boost PFC Converters For Airborne SystemDokument7 SeitenA Technique For Improving Input Current Zero-Crossing Distortion of Boost PFC Converters For Airborne SystemInternational Journal of Research in Engineering and ScienceNoch keine Bewertungen
- Physics 2 Vsaq 1Dokument15 SeitenPhysics 2 Vsaq 1Shiva ShivaNoch keine Bewertungen
- Integrator Information V2.8.2-131-Gf324cd6e2, 2022-05-28Dokument17 SeitenIntegrator Information V2.8.2-131-Gf324cd6e2, 2022-05-28Juan Carlos LesmasNoch keine Bewertungen
- Advanced Physics ReviewDokument3 SeitenAdvanced Physics ReviewalNoch keine Bewertungen
- McCoy VFO PDFDokument17 SeitenMcCoy VFO PDFFrancisco J. Aguilera HiguereyNoch keine Bewertungen
- SSC Physsmaple MCQ and CQDokument22 SeitenSSC Physsmaple MCQ and CQMohammad AnisuzzamanNoch keine Bewertungen
- Proton Precession MagnetometersDokument52 SeitenProton Precession MagnetometersAzmie RisyadNoch keine Bewertungen
- Module 4 B2Dokument24 SeitenModule 4 B2ozankacmazNoch keine Bewertungen
- Eddy Current Brake (PDFDrive)Dokument146 SeitenEddy Current Brake (PDFDrive)AlejandroNoch keine Bewertungen
- Making A Speaker From Homemade ObjectsDokument3 SeitenMaking A Speaker From Homemade ObjectsKoustav PalNoch keine Bewertungen
- Chater-2 Transformers PDFDokument59 SeitenChater-2 Transformers PDFTofiqe AdamNoch keine Bewertungen
- ElectronicDokument66 SeitenElectronicdamith galagedaraNoch keine Bewertungen
- Pacific Antenna 20 and 40M Lightweight Dipole Kit: Diagram Showing Configuration and Approximate LengthsDokument6 SeitenPacific Antenna 20 and 40M Lightweight Dipole Kit: Diagram Showing Configuration and Approximate LengthsedosviracNoch keine Bewertungen
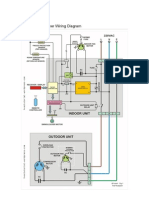
- Split Air Conditioner Wiring Diagram ContactorsDokument8 SeitenSplit Air Conditioner Wiring Diagram ContactorsVicente Rossi80% (5)
- Circuits 2 LaboratoryDokument22 SeitenCircuits 2 Laboratorypabloaguirre4293Noch keine Bewertungen
- Measurement (Ques - Ch2 - Electromechanical Instruments) PDFDokument56 SeitenMeasurement (Ques - Ch2 - Electromechanical Instruments) PDFmadivala nagarajaNoch keine Bewertungen
- Unity Secondary School Physics Chapter 22: Electromagnetic Induction AnswersDokument20 SeitenUnity Secondary School Physics Chapter 22: Electromagnetic Induction AnswersFrancis Ho HoNoch keine Bewertungen