Das könnte Ihnen auch gefallen
- Beams and Framed Structures: Structures and Solid Body MechanicsVon EverandBeams and Framed Structures: Structures and Solid Body MechanicsBewertung: 3 von 5 Sternen3/5 (2)
- 04 - Analysis of Beams Using Matrix Stiffness MethodDokument43 Seiten04 - Analysis of Beams Using Matrix Stiffness MethodRyiehmNoch keine Bewertungen
- Design of Concrete Structure Mini ProjectDokument22 SeitenDesign of Concrete Structure Mini ProjectDipankar NathNoch keine Bewertungen
- Cie 136Dokument151 SeitenCie 136Sancho BilogNoch keine Bewertungen
- Straight-Element Grid Analysis of Horizontally Curved Beam SystemsDokument10 SeitenStraight-Element Grid Analysis of Horizontally Curved Beam SystemsfostbarrNoch keine Bewertungen
- Frames Shear and Bending Moment PDFDokument9 SeitenFrames Shear and Bending Moment PDFCHA CHANoch keine Bewertungen
- Lesson 6 3D Framed StructuresDokument25 SeitenLesson 6 3D Framed Structurescriscab12345Noch keine Bewertungen
- Structural Analysis R19 - UNIT-1 (Ref-2)Dokument56 SeitenStructural Analysis R19 - UNIT-1 (Ref-2)SushNoch keine Bewertungen
- Structural Dynamic Analysis of Cyclic Symmetric Structures: Senior Systems Engineer, SAIC, Huntsville, AL 35806Dokument26 SeitenStructural Dynamic Analysis of Cyclic Symmetric Structures: Senior Systems Engineer, SAIC, Huntsville, AL 35806Sanjeev BiradarNoch keine Bewertungen
- Mechanics of Materials I: Dr. Mian Ashfaq AliDokument21 SeitenMechanics of Materials I: Dr. Mian Ashfaq AliNabeel EhsanNoch keine Bewertungen
- Module 3 - Analysis of Plane Trusses Using Matrix Stiffness MethodDokument39 SeitenModule 3 - Analysis of Plane Trusses Using Matrix Stiffness MethodVon Tiosing100% (1)
- 1501ENG Review Questions 2011Dokument11 Seiten1501ENG Review Questions 2011Brendan BartelNoch keine Bewertungen
- LECTURE 3 - StructuresDokument31 SeitenLECTURE 3 - StructuresALBERT MALIRONoch keine Bewertungen
- Ceg Lab 202Dokument73 SeitenCeg Lab 202Peace AdetunmibiNoch keine Bewertungen
- Statical IndeterminancyDokument25 SeitenStatical IndeterminancySougata DasNoch keine Bewertungen
- Plates and Shells - Chapter - Encyclopedia of Aerospace Engineering - 2010 PDFDokument10 SeitenPlates and Shells - Chapter - Encyclopedia of Aerospace Engineering - 2010 PDFOSCARDELTANoch keine Bewertungen
- Quimno - ST PitDokument51 SeitenQuimno - ST PitPrince QuimnoNoch keine Bewertungen
- Inertia MomentsDokument2 SeitenInertia Moments20-08702Noch keine Bewertungen
- Cross Sectional Properties of Thin-Walled Composite Beams: 16 International Conference On Composite MaterialsDokument7 SeitenCross Sectional Properties of Thin-Walled Composite Beams: 16 International Conference On Composite MaterialsAndras ZajNoch keine Bewertungen
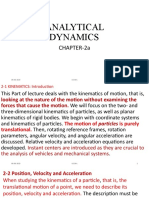
- ANALYTICAL DYNAMICS CHAPTER - 2aDokument87 SeitenANALYTICAL DYNAMICS CHAPTER - 2aAsım TutmazNoch keine Bewertungen
- Self EvaluationDokument19 SeitenSelf EvaluationRheanna SalutanNoch keine Bewertungen
- Module 4 - Analysis of Beams Using Matrix Stiffness MethodDokument34 SeitenModule 4 - Analysis of Beams Using Matrix Stiffness MethodVon TiosingNoch keine Bewertungen
- Beam DeflectionDokument10 SeitenBeam Deflectioncarlo manabatNoch keine Bewertungen
- Analysis of Structures: Mohammad Alimuzzaman BappyDokument36 SeitenAnalysis of Structures: Mohammad Alimuzzaman BappyFaizul Amin NayanNoch keine Bewertungen
- Aircraft Symmetric LoadsDokument13 SeitenAircraft Symmetric LoadsNavish KotwalNoch keine Bewertungen
- Practical Astigmatism AnalysisDokument14 SeitenPractical Astigmatism Analysisapi-3801483100% (1)
- Structure AnaylsisDokument13 SeitenStructure AnaylsisHassan AhmedNoch keine Bewertungen
- CH 5Dokument7 SeitenCH 5GadisaNoch keine Bewertungen
- Sudhir Reddy S.V.R (09311D0412)Dokument51 SeitenSudhir Reddy S.V.R (09311D0412)Sunil NairNoch keine Bewertungen
- A Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionDokument11 SeitenA Consistent Theory of Finite Stretches and Finite Rotations, in Space-Curved Beams of Arbitrary Cross-SectionBeny AbdouNoch keine Bewertungen
- Advanced Structural Analysis IntroductionDokument20 SeitenAdvanced Structural Analysis IntroductionJasmine PagligaranNoch keine Bewertungen
- Linear Non Linear FEMDokument24 SeitenLinear Non Linear FEMwial8295Noch keine Bewertungen
- Theory of Elasticity: Ceng 6501Dokument53 SeitenTheory of Elasticity: Ceng 6501Tekle Germariam100% (1)
- Introduction To The Theory of PlatesDokument41 SeitenIntroduction To The Theory of PlatesCHANDRA MANI GUPTANoch keine Bewertungen
- Mec32-3 Shear Moment in Beams With Simple LoadingDokument22 SeitenMec32-3 Shear Moment in Beams With Simple LoadingJhenalyn Del RosarioNoch keine Bewertungen
- Composite StructureDokument5 SeitenComposite StructureAziz SNoch keine Bewertungen
- Lecture 5 Shear and Moment in BeamsDokument12 SeitenLecture 5 Shear and Moment in BeamsNile DizonNoch keine Bewertungen
- Theory of StructuresDokument35 SeitenTheory of StructurespjNoch keine Bewertungen
- Analysis of Continuous Beams With Joint SlipDokument19 SeitenAnalysis of Continuous Beams With Joint SliprayNoch keine Bewertungen
- Kassim Ali Symmetry Notes Chapter 10Dokument32 SeitenKassim Ali Symmetry Notes Chapter 10rajal11Noch keine Bewertungen
- Tupling 1987 Cardan AnglesDokument6 SeitenTupling 1987 Cardan Anglesdanasolav1798Noch keine Bewertungen
- Civil Engg - Ijcseierd - Experimental and Analytical Study On The Dynamic Behavior of Frames Under Relative Displacement Between Support PointsDokument10 SeitenCivil Engg - Ijcseierd - Experimental and Analytical Study On The Dynamic Behavior of Frames Under Relative Displacement Between Support PointsTJPRC PublicationsNoch keine Bewertungen
- Advanced Structural AnalysisDokument93 SeitenAdvanced Structural AnalysisRoshan kumar patelNoch keine Bewertungen
- Module 3 ASTRENGM Cross Sectional PropertiesDokument19 SeitenModule 3 ASTRENGM Cross Sectional PropertiesAllyssa RosaldoNoch keine Bewertungen
- Chap-03 Anlysis in ProkonDokument115 SeitenChap-03 Anlysis in ProkonMohamed Raffik Bagha100% (1)
- Inelastic Analysis of Reinforced Concrete Space Frames Influenced BY Axial, Torsional and Bending InteractionDokument15 SeitenInelastic Analysis of Reinforced Concrete Space Frames Influenced BY Axial, Torsional and Bending Interactionjuan carlos molano toroNoch keine Bewertungen
- Hybrid Fibre Reinforced ConcreteDokument4 SeitenHybrid Fibre Reinforced ConcreteRoshankumar MohankarNoch keine Bewertungen
- Slope Deflection MethodDokument21 SeitenSlope Deflection MethodDivya Ramdev100% (1)
- Analysis of Framed StructuresDokument12 SeitenAnalysis of Framed StructuresTonymeriNoch keine Bewertungen
- ARC20011 Mechanics of Structures: Laboratory Session #2: Beam Bending Moment, Measurements and AnalysisDokument22 SeitenARC20011 Mechanics of Structures: Laboratory Session #2: Beam Bending Moment, Measurements and AnalysisKushan HiranthaNoch keine Bewertungen
- Biaxial Analysis of General Shaped Base PlatesDokument5 SeitenBiaxial Analysis of General Shaped Base PlatesSuheil BagasrawalaNoch keine Bewertungen
- Chapter-3-Fem Analysis TrussesDokument32 SeitenChapter-3-Fem Analysis TrussesFaisal MumtazNoch keine Bewertungen
- Pure BendingDokument22 SeitenPure BendingTarik Hassan ElsonniNoch keine Bewertungen
- Inclined Loads: Ce 311 Structural Theory August 26, 2020Dokument2 SeitenInclined Loads: Ce 311 Structural Theory August 26, 2020Victor LimNoch keine Bewertungen
- MOM I CH2 Week 6Dokument47 SeitenMOM I CH2 Week 6Muhammad Shahan AhmadNoch keine Bewertungen
- Truss AnalysisDokument11 SeitenTruss AnalysisAdrian ParasNoch keine Bewertungen
- Structural Analysis R19 - UNIT-1Dokument50 SeitenStructural Analysis R19 - UNIT-1sainadh upputhollaNoch keine Bewertungen
- Engineering Mechanics I Meg205-2Dokument15 SeitenEngineering Mechanics I Meg205-2Oyekale IniNoch keine Bewertungen
- Strength of Mat I 01Dokument5 SeitenStrength of Mat I 01Vlad ManoloiuNoch keine Bewertungen
- Introduction To StructuresDokument17 SeitenIntroduction To StructuresObed JimmyNoch keine Bewertungen
- The Big TEGO. Products Services Data Sheets-75-150-16!76!31-61Dokument31 SeitenThe Big TEGO. Products Services Data Sheets-75-150-16!76!31-61DWI RAHMASARI FATMAWATINoch keine Bewertungen
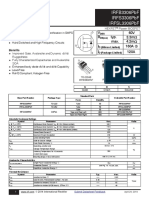
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADokument12 SeitenIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligNoch keine Bewertungen
- EI 6702-Logic and Distributed Control SystemDokument2 SeitenEI 6702-Logic and Distributed Control SystemMnskSaro50% (2)
- Java Lab Assignment.Dokument2 SeitenJava Lab Assignment.KAYNoch keine Bewertungen
- ElutriatorDokument9 SeitenElutriatoratiyorockfan9017Noch keine Bewertungen
- Icf 7 Module First YearDokument180 SeitenIcf 7 Module First YearMarvin PanlilioNoch keine Bewertungen
- Highway Design ProjectDokument70 SeitenHighway Design ProjectmuhammedNoch keine Bewertungen
- Optimization of Decarbonization On Steel IndustryDokument28 SeitenOptimization of Decarbonization On Steel Industrymsantosu000Noch keine Bewertungen
- Spark: Owner's ManualDokument5 SeitenSpark: Owner's Manualjorge medinaNoch keine Bewertungen
- Motionless Electromagnetic GeneratorDokument8 SeitenMotionless Electromagnetic Generatorraja100% (1)
- Fongs ProgrammerDokument5 SeitenFongs ProgrammerPankaj PolaraNoch keine Bewertungen
- API2000 Tank Venting CalcsDokument5 SeitenAPI2000 Tank Venting Calcsruhul01Noch keine Bewertungen
- Watchgas AirWatch MK1.0 Vs MK1.2Dokument9 SeitenWatchgas AirWatch MK1.0 Vs MK1.2elliotmoralesNoch keine Bewertungen
- Chapter One PDFDokument74 SeitenChapter One PDFAdelu BelleteNoch keine Bewertungen
- Cópia de Teste Excel - Intermediário (5166) .XLS: BIM Technology For EngineersDokument6 SeitenCópia de Teste Excel - Intermediário (5166) .XLS: BIM Technology For EngineersFernanda AzevedoNoch keine Bewertungen
- X-Plane Mobile ManualDokument66 SeitenX-Plane Mobile ManualRafael MunizNoch keine Bewertungen
- Life Processes: Science Unit 1Dokument19 SeitenLife Processes: Science Unit 1patil pratikNoch keine Bewertungen
- Harmony XB4 - XB4BD53Dokument5 SeitenHarmony XB4 - XB4BD53vNoch keine Bewertungen
- 5ROS Underslung BSaverTROUGHS25Dokument1 Seite5ROS Underslung BSaverTROUGHS25jonodo89Noch keine Bewertungen
- Table of Trigonometric IdentitiesDokument2 SeitenTable of Trigonometric IdentitiesVaios PeritogiannisNoch keine Bewertungen
- Servodisc CatalogDokument87 SeitenServodisc CatalogEstebanRojasKrustofskyNoch keine Bewertungen
- Review Skills 1-8Dokument1 SeiteReview Skills 1-8TegarNoch keine Bewertungen
- فيزياء لغات ثانوية عامة أنجليزى-webDokument462 Seitenفيزياء لغات ثانوية عامة أنجليزى-webMohamed RayanyNoch keine Bewertungen
- OIML R 137-1 & 2: Nternational EcommendationDokument76 SeitenOIML R 137-1 & 2: Nternational EcommendationAMY WEINoch keine Bewertungen
- T 096Dokument3 SeitenT 096abelNoch keine Bewertungen
- DA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFDokument329 SeitenDA Savitz - Interpreting Epidemiologic Evidence - Strategies For Study Design and Analysis 2003 PDFrindy_bilhaniNoch keine Bewertungen
- SV Concepts PLK PDFDokument276 SeitenSV Concepts PLK PDFPoojashree LRNoch keine Bewertungen
- S Energy SN 72 Cell Series Solar Panel Datasheet V 01Dokument2 SeitenS Energy SN 72 Cell Series Solar Panel Datasheet V 01infercomNoch keine Bewertungen
- SpaceClaim - Developers Guide-5-6Dokument2 SeitenSpaceClaim - Developers Guide-5-6Alexgh1993Noch keine Bewertungen
- Z Series: VZ-80 Series Portable Radio - VHF/UHFDokument2 SeitenZ Series: VZ-80 Series Portable Radio - VHF/UHFPrima SonyNoch keine Bewertungen
- Advanced Modelling Techniques in Structural DesignVon EverandAdvanced Modelling Techniques in Structural DesignBewertung: 5 von 5 Sternen5/5 (3)
- A Welder’s Handbook to Robotic ProgrammingVon EverandA Welder’s Handbook to Robotic ProgrammingBewertung: 5 von 5 Sternen5/5 (3)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Von EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Bewertung: 4 von 5 Sternen4/5 (3)
- Pocket Guide to Flanges, Fittings, and Piping DataVon EverandPocket Guide to Flanges, Fittings, and Piping DataBewertung: 3.5 von 5 Sternen3.5/5 (22)
- To Engineer Is Human: The Role of Failure in Successful DesignVon EverandTo Engineer Is Human: The Role of Failure in Successful DesignBewertung: 4 von 5 Sternen4/5 (138)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen
- Marine Structural Design CalculationsVon EverandMarine Structural Design CalculationsBewertung: 4.5 von 5 Sternen4.5/5 (13)
- Structural Cross Sections: Analysis and DesignVon EverandStructural Cross Sections: Analysis and DesignBewertung: 4.5 von 5 Sternen4.5/5 (19)
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresVon EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresBewertung: 1 von 5 Sternen1/5 (2)
- Artificial Intelligence: From Medieval Robots to Neural NetworksVon EverandArtificial Intelligence: From Medieval Robots to Neural NetworksBewertung: 4 von 5 Sternen4/5 (3)
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsVon EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNoch keine Bewertungen
- Structural Steel Design to Eurocode 3 and AISC SpecificationsVon EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNoch keine Bewertungen
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureVon EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureBewertung: 4.5 von 5 Sternen4.5/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Von EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Bewertung: 4 von 5 Sternen4/5 (5)
- Flow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesVon EverandFlow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesTomomichi NakamuraBewertung: 4.5 von 5 Sternen4.5/5 (4)
- Dark Aeon: Transhumanism and the War Against HumanityVon EverandDark Aeon: Transhumanism and the War Against HumanityBewertung: 5 von 5 Sternen5/5 (1)
- Artificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsVon EverandArtificial Intelligence: Learning about Chatbots, Robotics, and Other Business ApplicationsBewertung: 5 von 5 Sternen5/5 (3)
- Pile Design and Construction Rules of ThumbVon EverandPile Design and Construction Rules of ThumbBewertung: 4.5 von 5 Sternen4.5/5 (15)
- How to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionVon EverandHow to Survive a Robot Uprising: Tips on Defending Yourself Against the Coming RebellionBewertung: 3.5 von 5 Sternen3.5/5 (129)