Das könnte Ihnen auch gefallen
- Tesis Lignina PDFDokument242 SeitenTesis Lignina PDFJorge HerreraNoch keine Bewertungen
- Informe Nº1 Viscosidad de Fluidos NewtonianosDokument10 SeitenInforme Nº1 Viscosidad de Fluidos NewtonianosJorge HerreraNoch keine Bewertungen
- Viscosidad NewtonianosDokument5 SeitenViscosidad NewtonianosJorge HerreraNoch keine Bewertungen
- Viscosidad de Fluidos NewtonianosDokument10 SeitenViscosidad de Fluidos NewtonianosJorge HerreraNoch keine Bewertungen
- Poliester InsaturadoDokument89 SeitenPoliester InsaturadoJorge HerreraNoch keine Bewertungen
- Simulador PSDokument7 SeitenSimulador PSJorge HerreraNoch keine Bewertungen
- Craqueo Catalitico de AceiteDokument118 SeitenCraqueo Catalitico de AceiteJorge HerreraNoch keine Bewertungen
- Introduccion A La DemocraciaDokument2 SeitenIntroduccion A La DemocraciaJorge HerreraNoch keine Bewertungen
- Check List de Revisión de DiseñoDokument11 SeitenCheck List de Revisión de DiseñoYuly GómezNoch keine Bewertungen
- Principios Basicos de AutomatizacionDokument9 SeitenPrincipios Basicos de AutomatizacionSarah Smith0% (1)
- Grupo 3 LaboratorioDokument20 SeitenGrupo 3 LaboratorioHENRYNoch keine Bewertungen
- Materiales ModernosDokument18 SeitenMateriales ModernoselderchisoNoch keine Bewertungen
- Líneas de Prueba Del Transf. (Flyback)Dokument11 SeitenLíneas de Prueba Del Transf. (Flyback)darwinNoch keine Bewertungen
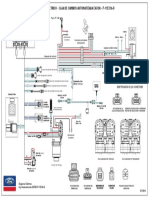
- DE Caja de Cambios Automatizada Eaton - F-11E316-D PDFDokument1 SeiteDE Caja de Cambios Automatizada Eaton - F-11E316-D PDFgabrielzinho4367% (3)
- OBJETIVO SensoresDokument4 SeitenOBJETIVO SensoresNestor AnchatuñaNoch keine Bewertungen
- Micro Seguridad Con Protección y Bobina PDFDokument8 SeitenMicro Seguridad Con Protección y Bobina PDFSergio A. A.Noch keine Bewertungen
- Francisco José Rodriguez Abellan - Actividad Tema 4Dokument10 SeitenFrancisco José Rodriguez Abellan - Actividad Tema 4franrodiaveNoch keine Bewertungen
- Detector de Humo PDFDokument2 SeitenDetector de Humo PDFantonioNoch keine Bewertungen
- Informe 5 Ce2 UcsmDokument8 SeitenInforme 5 Ce2 UcsmLuis QuinterosNoch keine Bewertungen
- PRACTICA 4 VIRTUAL. Circuitos Combinacionales AritméticosDokument2 SeitenPRACTICA 4 VIRTUAL. Circuitos Combinacionales AritméticosjhoanNoch keine Bewertungen
- Anexo2 Arquitectura PC Ideal Hernan Mauricio BedoyaDokument7 SeitenAnexo2 Arquitectura PC Ideal Hernan Mauricio BedoyamaoNoch keine Bewertungen
- Laboratorio Nº1 Sensores y Acondicionamiento de Señales Profesor SoteloDokument10 SeitenLaboratorio Nº1 Sensores y Acondicionamiento de Señales Profesor Sotelocorpses88Noch keine Bewertungen
- CAESDokument1 SeiteCAESAndres Alberto Soto JañaNoch keine Bewertungen
- Artes y EtiquetasDokument2 SeitenArtes y EtiquetasJuan Pablo MarroquínNoch keine Bewertungen
- Cap2 v4Dokument87 SeitenCap2 v4Antonio CorvalánNoch keine Bewertungen
- PNT Lambda 2sDokument13 SeitenPNT Lambda 2sCristina CTNoch keine Bewertungen
- Practica 2Dokument7 SeitenPractica 2Ilse VarelaNoch keine Bewertungen
- PLC Jeeg 111121Dokument28 SeitenPLC Jeeg 111121Tann VegaNoch keine Bewertungen
- Laboratorio Motor GeneradorDokument3 SeitenLaboratorio Motor GeneradorhubertNoch keine Bewertungen
- Manual Vti 2.5 01 - 2003Dokument31 SeitenManual Vti 2.5 01 - 2003supermacguiver100% (1)
- Polarización Potenciodinámica Expo..Dokument20 SeitenPolarización Potenciodinámica Expo..victor cardenasNoch keine Bewertungen
- Domótica AnálogaDokument2 SeitenDomótica AnálogaGUSTAVO ADOLFO HIGUERA CASTRONoch keine Bewertungen
- Lapem Ee-039-006 12Dokument10 SeitenLapem Ee-039-006 12Andres RojasNoch keine Bewertungen
- SNT Transformadores - 2021 01 05Dokument6 SeitenSNT Transformadores - 2021 01 05Jose Rafael CastroNoch keine Bewertungen
- Práctica N°6Dokument6 SeitenPráctica N°6Angêlä ApôntëNoch keine Bewertungen
- Teoría AtómicaDokument12 SeitenTeoría AtómicaDaniiel CxNoch keine Bewertungen
- Cuestionario NTC 4231Dokument15 SeitenCuestionario NTC 4231juancortes85100% (1)
- Lab 5 TelecomIIDokument4 SeitenLab 5 TelecomIIGonzalo Mamani QuispeNoch keine Bewertungen