Das könnte Ihnen auch gefallen
- Indigenous Practices in Poultry Farming Using MaggDokument11 SeitenIndigenous Practices in Poultry Farming Using Magg27051977Noch keine Bewertungen
- WhatsApp Based Alert System PROJECTDokument27 SeitenWhatsApp Based Alert System PROJECT27051977Noch keine Bewertungen
- WifiDokument4 SeitenWifi27051977Noch keine Bewertungen
- Monitor Heart Health at HomeDokument40 SeitenMonitor Heart Health at Home27051977Noch keine Bewertungen
- I DNT KnowDokument16 SeitenI DNT Know27051977Noch keine Bewertungen
- Improving Solar Energy Generation with TrackerDokument2 SeitenImproving Solar Energy Generation with Tracker27051977Noch keine Bewertungen
- Document2Dokument1 SeiteDocument227051977Noch keine Bewertungen
- YesDokument10 SeitenYes27051977Noch keine Bewertungen
- YhDokument1 SeiteYh27051977Noch keine Bewertungen
- COREN urged to sign Sydney AccordDokument2 SeitenCOREN urged to sign Sydney Accord27051977Noch keine Bewertungen
- IeeeDokument4 SeitenIeeeEstêvão SallesNoch keine Bewertungen
- Monitor Heart Health at HomeDokument40 SeitenMonitor Heart Health at Home27051977Noch keine Bewertungen
- Editage ComDokument4 SeitenEditage Com27051977Noch keine Bewertungen
- Reed Switch Interfacing With ArduinoDokument10 SeitenReed Switch Interfacing With Arduino27051977Noch keine Bewertungen
- 1 Cheating Prepaid Electric Meters1Dokument8 Seiten1 Cheating Prepaid Electric Meters127051977Noch keine Bewertungen
- Eec 125 QuestionDokument9 SeitenEec 125 Question27051977100% (3)
- Fingerprint Based Attendance System Using Labview and GSMDokument9 SeitenFingerprint Based Attendance System Using Labview and GSM27051977Noch keine Bewertungen
- Arduino Home Security SystemDokument19 SeitenArduino Home Security SystemMihai BogdanNoch keine Bewertungen
- Bubble RDokument3 SeitenBubble R27051977Noch keine Bewertungen
- GSM Base Paper PDFDokument8 SeitenGSM Base Paper PDFfreidyfriendsNoch keine Bewertungen
- House Building EstimateDokument1 SeiteHouse Building Estimate27051977Noch keine Bewertungen
- Home Automation and Security SystemDokument7 SeitenHome Automation and Security Systemacii journalNoch keine Bewertungen
- Estimate Foundation to Roof Building CostsDokument6 SeitenEstimate Foundation to Roof Building Costs27051977Noch keine Bewertungen
- The Bubbler SystemDokument2 SeitenThe Bubbler Systemmikelb5Noch keine Bewertungen
- Read MeDokument6 SeitenRead Me27051977Noch keine Bewertungen
- SSL CMD CommandsDokument2 SeitenSSL CMD Commands27051977Noch keine Bewertungen
- Read MeDokument1 SeiteRead Me27051977Noch keine Bewertungen
- SSL CMD CommandsDokument1 SeiteSSL CMD CommandsPaul Itusaca CanazaNoch keine Bewertungen
- Estimate Foundation to Roof Building CostsDokument6 SeitenEstimate Foundation to Roof Building Costs27051977Noch keine Bewertungen
- How To Personally Calculate The Number of Blocks Needed For My Building - QuoraDokument7 SeitenHow To Personally Calculate The Number of Blocks Needed For My Building - Quora27051977Noch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- John 16 33 Sweet Peace For Tried Believers - Charles SpurgeonDokument15 SeitenJohn 16 33 Sweet Peace For Tried Believers - Charles Spurgeonstevel75Noch keine Bewertungen
- Design and Analysis of Interleaved Boost Converter for Increased Renewable Energy OutputDokument18 SeitenDesign and Analysis of Interleaved Boost Converter for Increased Renewable Energy OutputHarshitNoch keine Bewertungen
- Nursing Care Plan For HypertensionDokument5 SeitenNursing Care Plan For HypertensionJessy MalloNoch keine Bewertungen
- Understanding the Four Aspects of EmotionsDokument13 SeitenUnderstanding the Four Aspects of EmotionsRaymond FaeldoñaNoch keine Bewertungen
- Auto IntroductionDokument90 SeitenAuto IntroductionShivanand ArwatNoch keine Bewertungen
- Aspirasi MekoniumDokument17 SeitenAspirasi MekoniumimanNoch keine Bewertungen
- DLP Science Week 6 Day 5Dokument3 SeitenDLP Science Week 6 Day 5John Carlo DinglasanNoch keine Bewertungen
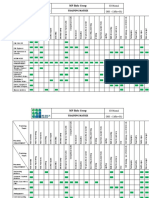
- MP Birla Group: Training MatrixDokument3 SeitenMP Birla Group: Training MatrixAprilia kusumaNoch keine Bewertungen
- Case Presentation On Actue Gangrenous Calculos CholecystitisDokument16 SeitenCase Presentation On Actue Gangrenous Calculos CholecystitisNayak DrNareshNoch keine Bewertungen
- Land Rover Range Rover Owners Manual 2007Dokument358 SeitenLand Rover Range Rover Owners Manual 2007PetreCaracaleanu0% (1)
- AIA Design Development Deliverable ListDokument8 SeitenAIA Design Development Deliverable Listpeterhwilliams100% (1)
- Climate Change & Disaster Risk Management: Razon, Lovelyn Rivera, Meg Anne Sta. Ines, MaricrisDokument56 SeitenClimate Change & Disaster Risk Management: Razon, Lovelyn Rivera, Meg Anne Sta. Ines, MaricrisMeg Anne Legaspi RiveraNoch keine Bewertungen
- 01 UM Nutrition Training PlanDokument11 Seiten01 UM Nutrition Training PlanJohn Leclair100% (2)
- Incorrect Fuel Level Indication RepairDokument3 SeitenIncorrect Fuel Level Indication RepairBogdan StefanNoch keine Bewertungen
- Soal Big A Tukpd 2011-2012 RevisiDokument5 SeitenSoal Big A Tukpd 2011-2012 RevisiTriana WatiNoch keine Bewertungen
- WozairDokument4 SeitenWozairRajakumar Bajji SubburamanNoch keine Bewertungen
- Aqua Mon 4000 PH Red Ox AnalyserDokument4 SeitenAqua Mon 4000 PH Red Ox Analyserarvindgupta_2005Noch keine Bewertungen
- PHD Call - TCD - Micha Ruhl - PHD Project Short DescriptionDokument2 SeitenPHD Call - TCD - Micha Ruhl - PHD Project Short DescriptionabuzarNoch keine Bewertungen
- Ahmed 2022Dokument20 SeitenAhmed 2022Mariela Estefanía Marín LópezNoch keine Bewertungen
- Tabel Benkelman Beam Baru - AsisDokument21 SeitenTabel Benkelman Beam Baru - AsisAsisNoch keine Bewertungen
- Esquematicos CaterpillarDokument9 SeitenEsquematicos Caterpillarluis alberto rodriguez100% (1)
- Why Britain Had Christianity EarlyDokument47 SeitenWhy Britain Had Christianity EarlyChris WoodNoch keine Bewertungen
- 06 Scaffold Erection and Dismantling (JHA-JSA)Dokument4 Seiten06 Scaffold Erection and Dismantling (JHA-JSA)AmanNoch keine Bewertungen
- Elcometer Wet-Film Gage 115 Spec SheetDokument2 SeitenElcometer Wet-Film Gage 115 Spec SheetMary CasillasNoch keine Bewertungen
- 7 Must Have Equipment Items For Your Church Safety TeamDokument7 Seiten7 Must Have Equipment Items For Your Church Safety TeamhmareidNoch keine Bewertungen
- DCT PIR insulation technical data sheetDokument4 SeitenDCT PIR insulation technical data sheetHenky MantophaniNoch keine Bewertungen
- Basic-Engineering - Electrical EngineeringDokument227 SeitenBasic-Engineering - Electrical EngineeringE-m FunaNoch keine Bewertungen
- Effect of Usage of Sinter in BOF Steelmaking As A Replacement To Iron Ore As Coolant For Thermal BalanceDokument11 SeitenEffect of Usage of Sinter in BOF Steelmaking As A Replacement To Iron Ore As Coolant For Thermal BalancesomnathNoch keine Bewertungen
- Crusher Type Part Number Description Weight (KG)Dokument3 SeitenCrusher Type Part Number Description Weight (KG)Juvenal CorreiaNoch keine Bewertungen
- Lab 7 Activities Sheet Winter 2020Dokument7 SeitenLab 7 Activities Sheet Winter 2020Mareline MendietaNoch keine Bewertungen