Das könnte Ihnen auch gefallen
- Acta - de - Reunion - 8Dokument2 SeitenActa - de - Reunion - 8Juank Ñ LduNoch keine Bewertungen
- Agencia Excel NuevoDokument108 SeitenAgencia Excel NuevoJuank Ñ LduNoch keine Bewertungen
- Acta - de - Reunion - 8Dokument2 SeitenActa - de - Reunion - 8Juank Ñ LduNoch keine Bewertungen
- Espel Mec 0138 PDokument30 SeitenEspel Mec 0138 PJuank Ñ LduNoch keine Bewertungen
- Aplicación Matlab Juan TapiaDokument15 SeitenAplicación Matlab Juan TapiaJuan Carlos TapiaNoch keine Bewertungen
- Cultura OrganizacionalDokument2 SeitenCultura OrganizacionalJuank Ñ LduNoch keine Bewertungen
- Fundamentos de la bioinstrumentaciónDokument250 SeitenFundamentos de la bioinstrumentaciónJuank Ñ LduNoch keine Bewertungen
- ExposicionDokument5 SeitenExposicionJuank Ñ LduNoch keine Bewertungen
- Práctica 3Dokument6 SeitenPráctica 3Juank Ñ LduNoch keine Bewertungen
- Guía completa sobre electromiografía (EMGDokument3 SeitenGuía completa sobre electromiografía (EMGJuank Ñ LduNoch keine Bewertungen
- Práctica 5Dokument3 SeitenPráctica 5Juank Ñ LduNoch keine Bewertungen
- Ñacato Juan OsirisDokument5 SeitenÑacato Juan OsirisJuank Ñ LduNoch keine Bewertungen
- Aspirantes para Ayudantes de LaboratorioDokument1 SeiteAspirantes para Ayudantes de LaboratorioJuank Ñ LduNoch keine Bewertungen
- Consult ADokument3 SeitenConsult AJuank Ñ LduNoch keine Bewertungen
- Aplicación Del Jacobiano para La Simulacion de Un Robot Omnidireccional de Tres Ruedas Por Control de TrayectoriaDokument15 SeitenAplicación Del Jacobiano para La Simulacion de Un Robot Omnidireccional de Tres Ruedas Por Control de TrayectoriaJuank Ñ LduNoch keine Bewertungen
- Informe Antena - Yagi-UdaDokument37 SeitenInforme Antena - Yagi-UdaJuank Ñ LduNoch keine Bewertungen
- Diseño de Una EncuestaDokument33 SeitenDiseño de Una EncuestaNavasG93Noch keine Bewertungen
- Aspirantes para Ayudantes de LaboratorioDokument1 SeiteAspirantes para Ayudantes de LaboratorioJuank Ñ LduNoch keine Bewertungen
- Certificado Agencia MatrizDokument1 SeiteCertificado Agencia MatrizJuank Ñ LduNoch keine Bewertungen
- Consult ADokument3 SeitenConsult AJuank Ñ LduNoch keine Bewertungen
- Equipo UDokument1 SeiteEquipo UJuank Ñ LduNoch keine Bewertungen
- Equipo UDokument1 SeiteEquipo UJuank Ñ LduNoch keine Bewertungen
- Control de Lectura N 1Dokument1 SeiteControl de Lectura N 1Juank Ñ LduNoch keine Bewertungen
- Micro 1Dokument2 SeitenMicro 1Juank Ñ LduNoch keine Bewertungen
- Pruebade Diagnóstico Noveno AñoDokument3 SeitenPruebade Diagnóstico Noveno AñoJuank Ñ LduNoch keine Bewertungen
- TRABAJO GRUPAL 1 FerDokument4 SeitenTRABAJO GRUPAL 1 FerJuank Ñ LduNoch keine Bewertungen
- Perfil de proyecto de innovación para la producción de alimentos 100% naturales para perrosDokument15 SeitenPerfil de proyecto de innovación para la producción de alimentos 100% naturales para perrosJuank Ñ LduNoch keine Bewertungen
- Control de Lectura N.-1Dokument3 SeitenControl de Lectura N.-1Juank Ñ LduNoch keine Bewertungen
- Tipos de EmpresasDokument1 SeiteTipos de EmpresasJuank Ñ LduNoch keine Bewertungen
- Ensayo 2 Fortalece Tu Musculo EmprendedorDokument4 SeitenEnsayo 2 Fortalece Tu Musculo EmprendedorJuank Ñ LduNoch keine Bewertungen
- Flujo de TuberiasDokument12 SeitenFlujo de TuberiasJhon Reyes TzNoch keine Bewertungen
- Ruedas y RotantesDokument128 SeitenRuedas y Rotantesdavid rosarioNoch keine Bewertungen
- Sopa de Letras Lógica y ConjuntosDokument31 SeitenSopa de Letras Lógica y ConjuntosyolviadrianaNoch keine Bewertungen
- Modifi Cab DoDokument127 SeitenModifi Cab DoAbraham Palacios Bitancur100% (1)
- TERMOFLUIDOSDokument4 SeitenTERMOFLUIDOSDavid Ag GaNoch keine Bewertungen
- Sensores de Flujo TransmisoresDokument46 SeitenSensores de Flujo Transmisoresanon_46080019933% (3)
- Determinacion Del Angulo de Reposo de MineralesDokument5 SeitenDeterminacion Del Angulo de Reposo de MineralesDniel Suarez RNoch keine Bewertungen
- Cafeina 7Dokument7 SeitenCafeina 7ever luisNoch keine Bewertungen
- Definición de Aparato Sanitario - Diccionario de Arquitectura y ConstrucciónDokument2 SeitenDefinición de Aparato Sanitario - Diccionario de Arquitectura y ConstrucciónDavis Infante LinoNoch keine Bewertungen
- CheckList Extintores PersonalizadoDokument18 SeitenCheckList Extintores Personalizadovanessa Robles100% (2)
- Tp2 Prensas y BalancinesDokument24 SeitenTp2 Prensas y BalancinesBren Urquizo80% (5)
- Mnanual+de+Problemas+Calor+y+Temperatura 5eDokument33 SeitenMnanual+de+Problemas+Calor+y+Temperatura 5eelmeraqpNoch keine Bewertungen
- Introduccion y BibliografiaDokument3 SeitenIntroduccion y BibliografiaAbelSancaAlferezNoch keine Bewertungen
- Dikoin Ene 2013Dokument176 SeitenDikoin Ene 2013Delfino TarinNoch keine Bewertungen
- Como Se Sintetiza Un Material ElasticoDokument19 SeitenComo Se Sintetiza Un Material ElasticoIban Solorzano IbalNoch keine Bewertungen
- Velocidad Máxima en Un Canal TrapecialDokument12 SeitenVelocidad Máxima en Un Canal TrapecialAnonymous rwKXhIiNoch keine Bewertungen
- Memoria de cálculo para diseño de toma de aguaDokument19 SeitenMemoria de cálculo para diseño de toma de aguaAntonio SotoNoch keine Bewertungen
- Conductores ElectricosDokument51 SeitenConductores ElectricosEdwin Santiago Villegas Auques100% (1)
- Límites de Atterberg y plasticidad de los suelos arcillososDokument28 SeitenLímites de Atterberg y plasticidad de los suelos arcillososNicole Saucedo FarellNoch keine Bewertungen
- Resistencias Sección Transversal y VariablesDokument14 SeitenResistencias Sección Transversal y VariablesAnonymous hR3e8SsNoch keine Bewertungen
- MicrobiologiaDokument3 SeitenMicrobiologiaLeonardoNoch keine Bewertungen
- T3 Campo Electrico Potencial+EDokument164 SeitenT3 Campo Electrico Potencial+EImanol Figuero ParrasNoch keine Bewertungen
- Balistica PNPDokument27 SeitenBalistica PNPMary Luisa Vivar SifuentesNoch keine Bewertungen
- Informe N2Dokument17 SeitenInforme N2Vladimir Lara RomeroNoch keine Bewertungen
- Empuje hidrostático: cálculo masa teórica vs experimentalDokument14 SeitenEmpuje hidrostático: cálculo masa teórica vs experimentalMaya BanksNoch keine Bewertungen
- Manual ScottDokument36 SeitenManual ScottDiego Inga100% (1)
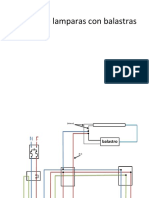
- Diagramas de Lamparas Con BalastrasDokument19 SeitenDiagramas de Lamparas Con BalastrasJoseNoch keine Bewertungen
- Prueba de Dureza ReporteDokument4 SeitenPrueba de Dureza ReportePiña Ruiz SaulNoch keine Bewertungen
- Efecto de Almacenamiento y Daño en El PozoDokument46 SeitenEfecto de Almacenamiento y Daño en El PozoandresxitoNoch keine Bewertungen