Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- ZTransformPairs PDFDokument1 SeiteZTransformPairs PDFmmorsy1981Noch keine Bewertungen
- Function Generator Using X86 MicroprocessorDokument7 SeitenFunction Generator Using X86 Microprocessormmorsy1981Noch keine Bewertungen
- Intel 8086 Instruction FormatDokument16 SeitenIntel 8086 Instruction Formatmmorsy1981Noch keine Bewertungen
- Internet of Things (IoT) A Vision, Architectural Elements, and Security IssuesDokument5 SeitenInternet of Things (IoT) A Vision, Architectural Elements, and Security Issuesmmorsy1981Noch keine Bewertungen
- Survey On Security in Internet of Things State of The Art and ChallengesDokument8 SeitenSurvey On Security in Internet of Things State of The Art and Challengesmmorsy1981Noch keine Bewertungen
- Tutorial Design CompilerDokument9 SeitenTutorial Design Compilermmorsy1981Noch keine Bewertungen
- Nano Editor Keyboard ShortcutsDokument1 SeiteNano Editor Keyboard Shortcutsmmorsy1981Noch keine Bewertungen
- Time-Adjustable Delay Circuit PDFDokument8 SeitenTime-Adjustable Delay Circuit PDFmmorsy1981Noch keine Bewertungen
- Lab 6 Introduction To VerilogDokument7 SeitenLab 6 Introduction To Verilogmmorsy1981Noch keine Bewertungen
- Synopsys VCS Commands For Verilogn CompilationDokument3 SeitenSynopsys VCS Commands For Verilogn Compilationmmorsy1981Noch keine Bewertungen
- IDC Digital Ink InfoBrief - en-USDokument20 SeitenIDC Digital Ink InfoBrief - en-USmmorsy1981Noch keine Bewertungen
- Foundational Proof-Carrying CodeDokument10 SeitenFoundational Proof-Carrying Codemmorsy1981Noch keine Bewertungen
- Formal Methods Roadmap PVS, ICS, and SALDokument28 SeitenFormal Methods Roadmap PVS, ICS, and SALmmorsy1981Noch keine Bewertungen
- Linear Temporal Logic Symbolic Model CheckingDokument41 SeitenLinear Temporal Logic Symbolic Model Checkingmmorsy1981100% (1)
- Chapter 9 - Program Control InstructionsDokument60 SeitenChapter 9 - Program Control Instructionsmmorsy1981100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Seismic Isolation For Strong, Near-Field Earthquake Motions: Victor A ZAYAS and Stanley S LOWDokument6 SeitenSeismic Isolation For Strong, Near-Field Earthquake Motions: Victor A ZAYAS and Stanley S LOWmuralihareNoch keine Bewertungen
- 62 1112 01 Americas Technical ManualDokument92 Seiten62 1112 01 Americas Technical ManualThiagoAgNoch keine Bewertungen
- Ansys WorkDokument19 SeitenAnsys WorkAhmed zia tahirNoch keine Bewertungen
- What Do We Know About Confinement in Reinforced Concrete Columns-Sakai-SheikhDokument16 SeitenWhat Do We Know About Confinement in Reinforced Concrete Columns-Sakai-SheikhAlberto Ezequiel León TamayoNoch keine Bewertungen
- Farahmand Et Al (2017) - Investigating The Scale-Dependency of The Geometrical and MechanicalDokument19 SeitenFarahmand Et Al (2017) - Investigating The Scale-Dependency of The Geometrical and MechanicalRaul PozoNoch keine Bewertungen
- Exploring The Impact of Chloride-Induced Corrosion On Limit States and Residual Capacity of RC StructuresDokument46 SeitenExploring The Impact of Chloride-Induced Corrosion On Limit States and Residual Capacity of RC StructuresSofía Córdoba SáenzNoch keine Bewertungen
- Hydraulic Turbine and Associated EquipmentDokument47 SeitenHydraulic Turbine and Associated Equipmentpavankumar0010% (1)
- Joints and Pains of Hydraulic CylindersDokument16 SeitenJoints and Pains of Hydraulic CylindersVinaySeebaNoch keine Bewertungen
- 49 CFR Part 107Dokument63 Seiten49 CFR Part 107nvdinh511Noch keine Bewertungen
- Experimental Studies On Utilization of Shredded Plastic Waste in Hardened Concrete MixDokument52 SeitenExperimental Studies On Utilization of Shredded Plastic Waste in Hardened Concrete MixShashi KumarNoch keine Bewertungen
- Bput 1470310707Dokument118 SeitenBput 1470310707Pramod KumarNoch keine Bewertungen
- Tabussum PDFDokument330 SeitenTabussum PDFMisael AlejandroNoch keine Bewertungen
- Crack Width Cal-T Beam-Euro CodeDokument10 SeitenCrack Width Cal-T Beam-Euro CodeGautham AllimuthuNoch keine Bewertungen
- AISC - Verification Examples: 1 Bolted Flange Plate Moment Connection - LRFDDokument35 SeitenAISC - Verification Examples: 1 Bolted Flange Plate Moment Connection - LRFDLuis Bryan Chuquimantari ArteagaNoch keine Bewertungen
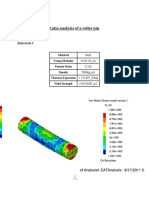
- Catia Analysis of A Roller PinDokument15 SeitenCatia Analysis of A Roller Pinanteneh tesfayeNoch keine Bewertungen
- Analysis and Design of Water TankDokument56 SeitenAnalysis and Design of Water TankKreesthu ReddyNoch keine Bewertungen
- Buried Flexible Pipelines PresentationDokument54 SeitenBuried Flexible Pipelines PresentationSanjay Phatangare100% (1)
- ShipRightFOI23April20081 PDFDokument0 SeitenShipRightFOI23April20081 PDFsailorgeorge1Noch keine Bewertungen
- Design and Construction of Long-Span Composite Beam Specimens For Large Structural-Fire TestsDokument13 SeitenDesign and Construction of Long-Span Composite Beam Specimens For Large Structural-Fire TestsHoran HoranNoch keine Bewertungen
- Rock Engineering & Ground Control M205Dokument4 SeitenRock Engineering & Ground Control M205Pawan SahuNoch keine Bewertungen
- Behavior of Reinforced Concrete Wide Concealed-Beam PDFDokument12 SeitenBehavior of Reinforced Concrete Wide Concealed-Beam PDFMarimuthu KaliyamoorthyNoch keine Bewertungen
- CSC Portal FrameDokument11 SeitenCSC Portal FramePhilip AmankwahNoch keine Bewertungen
- Mechanical Design Exit Exam Reviewer PDFDokument70 SeitenMechanical Design Exit Exam Reviewer PDFRyan Togonon100% (1)
- The Maximum Principal Stress Theory ..: Mohr's CircleDokument2 SeitenThe Maximum Principal Stress Theory ..: Mohr's CircleTeja DilipNoch keine Bewertungen
- L-Supprt With PL at The EdgeDokument26 SeitenL-Supprt With PL at The EdgeinnovativekarthiNoch keine Bewertungen
- 58-Slope Stability in CuttingDokument10 Seiten58-Slope Stability in CuttingDr.K.Rajeswara RaoNoch keine Bewertungen
- An Innovative No Hot Work Approach To Hull Repair On in Service FPSOs Using Sandwich Plate System OverlayDokument7 SeitenAn Innovative No Hot Work Approach To Hull Repair On in Service FPSOs Using Sandwich Plate System Overlaythlim19078656Noch keine Bewertungen
- Crack Width (Flexure - BS8110-2) by RGDokument2 SeitenCrack Width (Flexure - BS8110-2) by RGEngDbtNoch keine Bewertungen
- Structural Retrofitting - FRPDokument10 SeitenStructural Retrofitting - FRPMarvin ZapataNoch keine Bewertungen