Das könnte Ihnen auch gefallen
- ISO 9001 Flexible Couplings CatalogDokument16 SeitenISO 9001 Flexible Couplings CatalogAnonymous 4MwmDaNbNoch keine Bewertungen
- V80647 Parker Series 15-30P High Pressure FiltersDokument12 SeitenV80647 Parker Series 15-30P High Pressure FiltersPaulPaucarCamposNoch keine Bewertungen
- Moog Pumps RKP Catalog en PDFDokument81 SeitenMoog Pumps RKP Catalog en PDFJosé Soares100% (1)
- High Torque Geared Motors: T 238.000 NM Output Torque (175.500 LBF - FT)Dokument26 SeitenHigh Torque Geared Motors: T 238.000 NM Output Torque (175.500 LBF - FT)SAKDA MAPRADITKULNoch keine Bewertungen
- DNB CT Analyzer User ManualDokument154 SeitenDNB CT Analyzer User ManualSaid WahdanNoch keine Bewertungen
- Salami Catalog Group3 Zupcaste PumpeDokument32 SeitenSalami Catalog Group3 Zupcaste Pumpeado_22Noch keine Bewertungen
- TD8600005733 03e PDFDokument93 SeitenTD8600005733 03e PDFshahnamNoch keine Bewertungen
- WalvoilDokument64 SeitenWalvoilSamad A BakarNoch keine Bewertungen
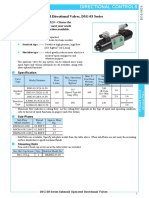
- Solenoid Directional Valves DHI: Direct Operated, ISO 4401 Size 06Dokument4 SeitenSolenoid Directional Valves DHI: Direct Operated, ISO 4401 Size 06EBNoch keine Bewertungen
- 9056 Vocational Axles BrochureDokument18 Seiten9056 Vocational Axles BrochureAbdelhamid HaramiNoch keine Bewertungen
- Shuttle Valves: Catalog HY15-3502/USDokument17 SeitenShuttle Valves: Catalog HY15-3502/USPartsGopher.comNoch keine Bewertungen
- Big Blue Air PakDokument146 SeitenBig Blue Air Pakhidayat rachmatNoch keine Bewertungen
- Iocci Strozzi GaltechDokument14 SeitenIocci Strozzi GaltechmagzigioNoch keine Bewertungen
- Compendium Dpe Guidelines 31-03-2015Dokument650 SeitenCompendium Dpe Guidelines 31-03-2015pkkothariNoch keine Bewertungen
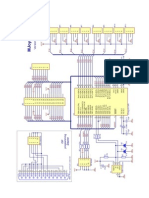
- MJoy 16 C 1Dokument2 SeitenMJoy 16 C 1Edilberto SantosNoch keine Bewertungen
- PGP030 031 SeriesDokument28 SeitenPGP030 031 SeriesWesame ShnodaNoch keine Bewertungen
- Group 3 Pilot Circuit: RCV Pedal Remote Control Valve (LH Lever) Remote Control Valve (RH Lever)Dokument8 SeitenGroup 3 Pilot Circuit: RCV Pedal Remote Control Valve (LH Lever) Remote Control Valve (RH Lever)thierrylindoNoch keine Bewertungen
- TM 10-3930-256-10 Mhe-198 Baker Model Ftd-060-Ee Forklift TruckDokument30 SeitenTM 10-3930-256-10 Mhe-198 Baker Model Ftd-060-Ee Forklift TruckAdvocateNoch keine Bewertungen
- Aa2fm Model CodeDokument27 SeitenAa2fm Model CodeCristianNoch keine Bewertungen
- Guidelines for Central Public Sector EnterprisesDokument503 SeitenGuidelines for Central Public Sector EnterprisesKrishna SwainNoch keine Bewertungen
- 2-Latest EIC-E-1002-0 (DSG-03 Series Solenoid Operated Directional Valves)Dokument12 Seiten2-Latest EIC-E-1002-0 (DSG-03 Series Solenoid Operated Directional Valves)Sujeet KumarNoch keine Bewertungen
- Parts List 511 Series: Effective: January 15, 2015 Supersedes: July 15, 2014Dokument20 SeitenParts List 511 Series: Effective: January 15, 2015 Supersedes: July 15, 2014jhon peñaNoch keine Bewertungen
- Manual Programacion AndroidDokument108 SeitenManual Programacion AndroidFranz JW MontezaNoch keine Bewertungen
- MV99 - Load Sensing VVDokument46 SeitenMV99 - Load Sensing VVthailanNoch keine Bewertungen
- Hydraulic Brake Systems and Components For Off-Highway Vehicles and EquipmentDokument10 SeitenHydraulic Brake Systems and Components For Off-Highway Vehicles and EquipmentJenner Volnney Quispe ChataNoch keine Bewertungen
- Report No (1) Haydrulic MachinesDokument15 SeitenReport No (1) Haydrulic MachinesWesame Shnoda100% (1)
- Hy17 8357 Uk - PCL4 PDFDokument20 SeitenHy17 8357 Uk - PCL4 PDFcoulibalyoumarNoch keine Bewertungen
- Fluidman Hydraulic Valve Manufacturer WebsiteDokument142 SeitenFluidman Hydraulic Valve Manufacturer WebsiteCristobal0% (1)
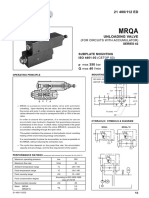
- Accumulator Unloading Valve, Type MRQADokument2 SeitenAccumulator Unloading Valve, Type MRQALibinNoch keine Bewertungen
- MHV Proportional Directional Control Valve Series MHV... K: FeaturesDokument28 SeitenMHV Proportional Directional Control Valve Series MHV... K: FeaturesthijssilderhuisNoch keine Bewertungen
- SpeDokument12 SeitenSpeseaqu3stNoch keine Bewertungen
- BNR32 Service Manual BookmarkedDokument804 SeitenBNR32 Service Manual Bookmarkedbyrnesvictim75% (4)
- 40Ω -10Ω Series Flow Control and ReliefDokument10 Seiten40Ω -10Ω Series Flow Control and ReliefMohamed FersiNoch keine Bewertungen
- 3800 PDFDokument202 Seiten3800 PDFRenny MataNoch keine Bewertungen
- Slewing Units - en-US - 20140701 - 121105Dokument74 SeitenSlewing Units - en-US - 20140701 - 121105Putut SuprihartonoNoch keine Bewertungen
- Directional Control Valve Technical Specs and DimensionsDokument66 SeitenDirectional Control Valve Technical Specs and DimensionsHui ChenNoch keine Bewertungen
- Navy Training Plan for Crash CranesDokument50 SeitenNavy Training Plan for Crash CranesORLANDO CASTILLONoch keine Bewertungen
- TG 73-200 - en PDFDokument7 SeitenTG 73-200 - en PDFSheril ChandraboseNoch keine Bewertungen
- Katalog Hagglunds Motor CBM TypeDokument28 SeitenKatalog Hagglunds Motor CBM TypeRudianto SakkaNoch keine Bewertungen
- Hydraulic Pump - Wheel Loader Komatsu Wa20-1 - Work Equipment Control System 777partsDokument2 SeitenHydraulic Pump - Wheel Loader Komatsu Wa20-1 - Work Equipment Control System 777partsashraf elsayedNoch keine Bewertungen
- Excercise Fluid Power Control NPTELDokument1.164 SeitenExcercise Fluid Power Control NPTELTrần Hoàng VủNoch keine Bewertungen
- Hydraulics and Pneumatics Question Bank for Mechanical Engineering StudentsDokument15 SeitenHydraulics and Pneumatics Question Bank for Mechanical Engineering StudentsSC 8D musicNoch keine Bewertungen
- Brochure E Series enDokument5 SeitenBrochure E Series enAndy0% (1)
- 3 PTL MBD SimulationDokument8 Seiten3 PTL MBD SimulationSumit SheoranNoch keine Bewertungen
- M-020 Volume 2 Manual Belt FeedersDokument1.355 SeitenM-020 Volume 2 Manual Belt Feedersjose maria chavezNoch keine Bewertungen
- Everything You Need to Know About External Gear PumpsDokument7 SeitenEverything You Need to Know About External Gear PumpsPrince ShanNoch keine Bewertungen
- Pvi017 Uk - ParkerDokument27 SeitenPvi017 Uk - Parkertelmaib2003Noch keine Bewertungen
- Logan Clutch Catalog SAE Direct Drive PTODokument30 SeitenLogan Clutch Catalog SAE Direct Drive PTOnksiavashNoch keine Bewertungen
- Design and Analysis of 22 Ton Class Excavator Swing Braking SystemDokument6 SeitenDesign and Analysis of 22 Ton Class Excavator Swing Braking SystemInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Truck Crane: Zoomlion Heavy Industry Science & Technology Co.,LtdDokument4 SeitenTruck Crane: Zoomlion Heavy Industry Science & Technology Co.,Ltdfcesar1986Noch keine Bewertungen
- Cat - Dcs.sis - Controller.attachment - Boom Float (Smart Boom)Dokument2 SeitenCat - Dcs.sis - Controller.attachment - Boom Float (Smart Boom)FrancoNoch keine Bewertungen
- Fast Forw Ard, Manual Op Manual Op - Feed ValveDokument3 SeitenFast Forw Ard, Manual Op Manual Op - Feed ValveA Ramos GabyNoch keine Bewertungen
- Junttan PM16 DatasheetDokument4 SeitenJunttan PM16 DatasheetjovanangelssNoch keine Bewertungen
- Hydraulic TechnologyDokument76 SeitenHydraulic TechnologyOgulcan CafNoch keine Bewertungen
- Atos - Modular Relief Valve - HMP HM KMDokument4 SeitenAtos - Modular Relief Valve - HMP HM KMClaudecir PereiraNoch keine Bewertungen
- Design and Analysis of Hydraulic Arm With GripperDokument6 SeitenDesign and Analysis of Hydraulic Arm With GripperIJRASETPublicationsNoch keine Bewertungen
- Table of ContentsDokument27 SeitenTable of ContentsEng-Mohammed SalemNoch keine Bewertungen
- Zerospeed Active StabilizerDokument7 SeitenZerospeed Active StabilizerBinh PhamNoch keine Bewertungen
- 6 - Motion StabilizationDokument19 Seiten6 - Motion StabilizationJofin LukoseNoch keine Bewertungen
- Quantum XT Stabilising SystemDokument18 SeitenQuantum XT Stabilising Systemmariusamd100% (1)
- Rietveld Refinement GuidelinesDokument15 SeitenRietveld Refinement GuidelinesdanieldorelleNoch keine Bewertungen
- Buenos Aires 1895Dokument1 SeiteBuenos Aires 1895danieldorelleNoch keine Bewertungen
- Ternary Equilibrium Diagrams by WestDokument78 SeitenTernary Equilibrium Diagrams by WestdanieldorelleNoch keine Bewertungen
- Preface Bassanini 150101DEF PDFDokument10 SeitenPreface Bassanini 150101DEF PDFdanieldorelleNoch keine Bewertungen
- Humedales Rio LujanDokument24 SeitenHumedales Rio LujandanieldorelleNoch keine Bewertungen
- 9557 PDFDokument10 Seiten9557 PDFdanieldorelleNoch keine Bewertungen
- Celtic FC Annual Report 2012Dokument68 SeitenCeltic FC Annual Report 2012Tifoso BilanciatoNoch keine Bewertungen
- 12 BolewskiDokument16 Seiten12 BolewskiLjubica SunkicNoch keine Bewertungen
- Oscilloscope Tektronix 212 Technical ManualDokument83 SeitenOscilloscope Tektronix 212 Technical ManualdanieldorelleNoch keine Bewertungen
- Bolt Torque TableDokument2 SeitenBolt Torque Tablesaroat moongwattanaNoch keine Bewertungen
- Problem Set 6: Solutions: U A Department of Physics and Astronomy PH 106-4 / Leclair Fall 2008Dokument8 SeitenProblem Set 6: Solutions: U A Department of Physics and Astronomy PH 106-4 / Leclair Fall 2008Nicolás KozakNoch keine Bewertungen
- Domm Lect15 Balancing of Linkage Part1Dokument3 SeitenDomm Lect15 Balancing of Linkage Part1Ayush BhadauriaNoch keine Bewertungen
- Speed Modeling of DC Motorcusing Tacho GeneratorDokument7 SeitenSpeed Modeling of DC Motorcusing Tacho GeneratorAbanoub Malak SelemNoch keine Bewertungen
- Panasonic Motor Selection GuideDokument6 SeitenPanasonic Motor Selection GuideAnnish KumarNoch keine Bewertungen
- AMME3500 2013 Assignment 2Dokument5 SeitenAMME3500 2013 Assignment 2JinDownloaderFree92Noch keine Bewertungen
- Moment of Inertia ExperimentDokument9 SeitenMoment of Inertia ExperimentOmair Sadiq100% (1)
- A Brief History of Spherical Robot (AutoRecovered)Dokument5 SeitenA Brief History of Spherical Robot (AutoRecovered)Rikko PutraNoch keine Bewertungen
- A Parametric Study of Spur Gear Dynamics PDFDokument88 SeitenA Parametric Study of Spur Gear Dynamics PDFCan CemreNoch keine Bewertungen
- Physics 9th Mcq'sDokument9 SeitenPhysics 9th Mcq'sMehar Waqas JavedNoch keine Bewertungen
- Lab2-Principle of MomentDokument7 SeitenLab2-Principle of MomentNur Syamiza Zamri67% (3)
- ME2112 - (Part 1) - StaticsDokument74 SeitenME2112 - (Part 1) - StaticsdinodanoNoch keine Bewertungen
- Scalars and Vectors ReviewDokument2 SeitenScalars and Vectors ReviewimranNoch keine Bewertungen
- Lesson 1: Rectilinear Translation MotionDokument39 SeitenLesson 1: Rectilinear Translation MotionAaron EserNoch keine Bewertungen
- Atwood's MachineDokument22 SeitenAtwood's MachineagnesNoch keine Bewertungen
- Dynamics of Rigid BodiesDokument9 SeitenDynamics of Rigid BodiesJifford Rois HernanNoch keine Bewertungen
- Electrical Measurement DynamicsDokument9 SeitenElectrical Measurement DynamicsGovernment Polytechnic Gulzarbagh Patna 7Noch keine Bewertungen
- Dynamic of Machine PDFDokument42 SeitenDynamic of Machine PDFl8o8r8d8s8i8v8100% (1)
- Upsc Physics Optional Tutorial Sheets PDFDokument51 SeitenUpsc Physics Optional Tutorial Sheets PDFpankaj ahlawatNoch keine Bewertungen
- Turning Effect of ForceDokument69 SeitenTurning Effect of Forceyihao2007034Noch keine Bewertungen
- JEE Advanced 2018 Paper I Question PaperDokument33 SeitenJEE Advanced 2018 Paper I Question PaperKushagra SagarNoch keine Bewertungen
- Data Sheet For SIMOTICS S-1FG1Dokument3 SeitenData Sheet For SIMOTICS S-1FG1Aung Naing OoNoch keine Bewertungen
- Dynamic Analysis ME422-Graphical Method1Dokument10 SeitenDynamic Analysis ME422-Graphical Method1Nihal GuptaNoch keine Bewertungen
- Robot Drivetrain Design PrinciplesDokument22 SeitenRobot Drivetrain Design PrinciplesTaufik RhomeNoch keine Bewertungen
- Physics TextbookDokument544 SeitenPhysics TextbookHannah Coker100% (1)
- Service Manual Torq/Gard ™: Overload ClutchDokument8 SeitenService Manual Torq/Gard ™: Overload ClutchSuhas KODRENoch keine Bewertungen
- Dynamometer - 1Dokument3 SeitenDynamometer - 1Vishal BhattNoch keine Bewertungen
- Olympiad Physics INPHO Solved Question Paper 2009Dokument20 SeitenOlympiad Physics INPHO Solved Question Paper 2009RamNoch keine Bewertungen
- Torque Problems From HoltDokument5 SeitenTorque Problems From Holtgiri_sundar5930Noch keine Bewertungen
- Bab 2 Hal 23-25Dokument3 SeitenBab 2 Hal 23-25Dio Izqhaq Risky SasongkoNoch keine Bewertungen