Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Paccar MX 11 ENGINE Operators Manual 2018Dokument104 SeitenPaccar MX 11 ENGINE Operators Manual 2018ddi1150% (2)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Off-Grid Solar Panel System Price 1kw-10kw 2019 - PricenmoreDokument6 SeitenOff-Grid Solar Panel System Price 1kw-10kw 2019 - Pricenmoreamiteetumtech2013Noch keine Bewertungen
- Solar Battery Bank Sizing Calculator - Size Off-Grid BatteriesDokument8 SeitenSolar Battery Bank Sizing Calculator - Size Off-Grid Batteriesamiteetumtech2013Noch keine Bewertungen
- Chapter 32C - Electromagnetic WavesDokument34 SeitenChapter 32C - Electromagnetic Wavesamiteetumtech2013Noch keine Bewertungen
- 20 Digital Twins Solution ProvidersDokument9 Seiten20 Digital Twins Solution Providersferdi66Noch keine Bewertungen
- 50 58 Eng Concrete TestingDokument92 Seiten50 58 Eng Concrete TestingJimmy LopezNoch keine Bewertungen
- APO Overview v1Dokument58 SeitenAPO Overview v1topankajNoch keine Bewertungen
- Pulsar Spare Parts PriceDokument3 SeitenPulsar Spare Parts Pricemansoormsk84% (25)
- Lecture 2: Electrostatics: You May Download All The Class Lectures From The Following BlogDokument43 SeitenLecture 2: Electrostatics: You May Download All The Class Lectures From The Following Blogamiteetumtech2013Noch keine Bewertungen
- MagnetostaticsDokument33 SeitenMagnetostaticsamiteetumtech2013Noch keine Bewertungen
- Electromagnetic Theory Unit - I: Subject Code Subject Name Staff NameDokument30 SeitenElectromagnetic Theory Unit - I: Subject Code Subject Name Staff Nameamiteetumtech2013Noch keine Bewertungen
- Off-Grid Solar Panel System Price 1kw-10kw 2019 - PricenmoreDokument6 SeitenOff-Grid Solar Panel System Price 1kw-10kw 2019 - Pricenmoreamiteetumtech2013Noch keine Bewertungen
- General Requirements of Traction Motors / Traction System: 1) D.C. Series MotorDokument2 SeitenGeneral Requirements of Traction Motors / Traction System: 1) D.C. Series Motoramiteetumtech2013Noch keine Bewertungen
- Familiarization With Various Matlab Commands Used in Electrical EngineeringDokument24 SeitenFamiliarization With Various Matlab Commands Used in Electrical Engineeringamiteetumtech2013Noch keine Bewertungen
- DC Machine 1Dokument5 SeitenDC Machine 1amiteetumtech2013Noch keine Bewertungen
- Non ConventionalDokument29 SeitenNon Conventionalamiteetumtech2013Noch keine Bewertungen
- Characteristic of DC GeneratorsDokument5 SeitenCharacteristic of DC Generatorsamiteetumtech2013Noch keine Bewertungen
- Visualization and Investigation of Unified Power Flow Controller (UPFC) Non-Linearity in Power FlowDokument6 SeitenVisualization and Investigation of Unified Power Flow Controller (UPFC) Non-Linearity in Power Flowamiteetumtech2013Noch keine Bewertungen
- Load Technique: Reliable Flow For RadialDokument7 SeitenLoad Technique: Reliable Flow For Radialamiteetumtech2013Noch keine Bewertungen
- Datasheet 3Dokument7 SeitenDatasheet 3محمدعليNoch keine Bewertungen
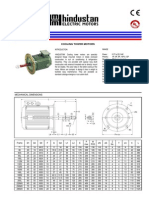
- Cooling Tower MotorDokument2 SeitenCooling Tower MotorDipendraTomarNoch keine Bewertungen
- CV Qazim PDFDokument1 SeiteCV Qazim PDFUtkarsh Anand CSENoch keine Bewertungen
- Guidance On ECDIS For Ships Calling at Australian Ports: Software Quality Assurance AnomaliesDokument3 SeitenGuidance On ECDIS For Ships Calling at Australian Ports: Software Quality Assurance AnomaliesCanumalla RamkumarNoch keine Bewertungen
- All Lab WorkDokument43 SeitenAll Lab WorkHarsh ChopraNoch keine Bewertungen
- Exsite Ip Pant Tilt System Spec SheetDokument8 SeitenExsite Ip Pant Tilt System Spec SheetAnuj PalNoch keine Bewertungen
- Topics That We Will ExploreDokument135 SeitenTopics That We Will ExploreAJNoch keine Bewertungen
- Course - Ng-Bootstrap PlaybookDokument49 SeitenCourse - Ng-Bootstrap PlaybookshyamVENKATNoch keine Bewertungen
- Pamas S40 Avtur: Portable Particle Counting System For Aviation Turbine FuelDokument2 SeitenPamas S40 Avtur: Portable Particle Counting System For Aviation Turbine FuelRickie EdwardoNoch keine Bewertungen
- Smart Fire Alarm System Using ArduinoDokument2 SeitenSmart Fire Alarm System Using Arduinokritwik barua100% (1)
- Cp15 Semester 6Dokument16 SeitenCp15 Semester 6mithunprayag0% (1)
- 50-Article Text-90-1-10-20201130Dokument10 Seiten50-Article Text-90-1-10-20201130Ashih GuptaNoch keine Bewertungen
- 3D Construction Printing: Technical Specifications 2021Dokument3 Seiten3D Construction Printing: Technical Specifications 2021Camilo Sebastián Romero VivancoNoch keine Bewertungen
- Ad Notam Display Frame Unit: Product HighlightsDokument5 SeitenAd Notam Display Frame Unit: Product HighlightsVishal SuryawaniNoch keine Bewertungen
- 4.11.-Eaton CCM Freedom - Nema Contactor and StartersDokument37 Seiten4.11.-Eaton CCM Freedom - Nema Contactor and Startersmartinel noob y baty mozNoch keine Bewertungen
- Automatic Headlight Hi-Lo Beam Using ArduinoDokument14 SeitenAutomatic Headlight Hi-Lo Beam Using ArduinoMark Anthony Lluvido PlatinoNoch keine Bewertungen
- Wireless Headphones Bluedio T2 Plus Turbine - 75Mm Driver, Bluetooth 4.1, 220mah Battery, Built-In Mic, FM Mode, SD Card, 110DbDokument7 SeitenWireless Headphones Bluedio T2 Plus Turbine - 75Mm Driver, Bluetooth 4.1, 220mah Battery, Built-In Mic, FM Mode, SD Card, 110DbLinas BielskisNoch keine Bewertungen
- Project Report: Online BankingDokument38 SeitenProject Report: Online BankingRoshan ShawNoch keine Bewertungen
- Summer ProjectDokument54 SeitenSummer ProjectVikram MauryaNoch keine Bewertungen
- Unit - I: Pragati Engineering College, Surampalem (Autonomous) Computer Science and Engineering B.Tech Ii Year I SemesterDokument16 SeitenUnit - I: Pragati Engineering College, Surampalem (Autonomous) Computer Science and Engineering B.Tech Ii Year I Semesterveera jeejneshNoch keine Bewertungen
- HPE BladeSystem Onboard Administrator Release Notes 4.97-A00112729en - UsDokument16 SeitenHPE BladeSystem Onboard Administrator Release Notes 4.97-A00112729en - Usamit_post2000Noch keine Bewertungen
- Privacy Policy NykaaDokument3 SeitenPrivacy Policy Nykaatushar nandwaniNoch keine Bewertungen
- Samsung Gb-19sen Chassis Le19r86bd LCDDokument117 SeitenSamsung Gb-19sen Chassis Le19r86bd LCDAntonio CersosimoNoch keine Bewertungen
- Panel Coker BP PDFDokument2 SeitenPanel Coker BP PDFAlejandro José Poveda GuevaraNoch keine Bewertungen
- Gambia ICT - Final - WebDokument77 SeitenGambia ICT - Final - Webabey.mulugetaNoch keine Bewertungen