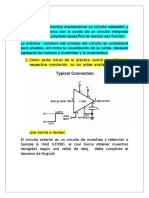
Das könnte Ihnen auch gefallen
- Uso de La Transformada "Z". Cálculo Analítico y Con MatlabDokument20 SeitenUso de La Transformada "Z". Cálculo Analítico y Con MatlabVictor CondoriNoch keine Bewertungen
- Sistemas LTIDokument2 SeitenSistemas LTIJoelAlexanderNoch keine Bewertungen
- Variables de EstadoDokument49 SeitenVariables de EstadoRobertt Stone100% (1)
- Problemas Propuestos Con Amplificadores OperacionalesDokument11 SeitenProblemas Propuestos Con Amplificadores Operacionalesquiquemc1209Noch keine Bewertungen
- Informe 7 PdsDokument30 SeitenInforme 7 PdsFelipe Blair Ramírez Zamora100% (1)
- Parcial 3Dokument4 SeitenParcial 3Vianne Mamani CalleNoch keine Bewertungen
- Practica Laboratorio 5 Sintesis Dipolos LC FormatoDokument7 SeitenPractica Laboratorio 5 Sintesis Dipolos LC FormatoVianne Mamani CalleNoch keine Bewertungen
- Transformada Z en Matlab para Series y TransformadasDokument11 SeitenTransformada Z en Matlab para Series y TransformadasSam Baltazar100% (13)
- Practica 4 - Diagrama de BodeDokument5 SeitenPractica 4 - Diagrama de BodeEnnio AntonioNoch keine Bewertungen
- Avance PDSDokument6 SeitenAvance PDSAlberto HinojosaNoch keine Bewertungen
- Informe 3 Control DigitalDokument6 SeitenInforme 3 Control DigitalFran Ayala RosasNoch keine Bewertungen
- Controladores P, PI y PD para sistemas de aeronaves y procesosDokument8 SeitenControladores P, PI y PD para sistemas de aeronaves y procesosAlisson RengifoNoch keine Bewertungen
- Ejercicios de Convolucion en MatlabDokument3 SeitenEjercicios de Convolucion en MatlabFreddy Jesus100% (1)
- Transformada ZDokument45 SeitenTransformada ZLuz666Noch keine Bewertungen
- Informe Final 4 MalcaDokument8 SeitenInforme Final 4 MalcaCésar Loayza JanampaNoch keine Bewertungen
- TE, Lab06 - Potencial Eléctrico Con Matlab PDFDokument5 SeitenTE, Lab06 - Potencial Eléctrico Con Matlab PDFJOSE RAFAEL CACERES GARAVITONoch keine Bewertungen
- Control Por Realimentación de Estados Del Motor DCDokument11 SeitenControl Por Realimentación de Estados Del Motor DCMilo VanvanNoch keine Bewertungen
- B-2-8. Obtenga Una Representación en El Espacio de Estados Del Sistema de LaDokument2 SeitenB-2-8. Obtenga Una Representación en El Espacio de Estados Del Sistema de LaGisela LázaroNoch keine Bewertungen
- Laboratorio N°1 - Control DigitalDokument7 SeitenLaboratorio N°1 - Control DigitalEtson Heasid Tarazona CalixtoNoch keine Bewertungen
- Laboratorio 1Dokument13 SeitenLaboratorio 1ELIAN EDMUNDO ARENAS YATACONoch keine Bewertungen
- Amplificadores: Sistemas de Ecuaciones DiferencialesDokument10 SeitenAmplificadores: Sistemas de Ecuaciones DiferencialesJoan JoseNoch keine Bewertungen
- Diseño de Antena Con 4nec2 BDokument2 SeitenDiseño de Antena Con 4nec2 Bpedro perez100% (1)
- Sistemas discretos respuesta impulsionalDokument13 SeitenSistemas discretos respuesta impulsionalFelipe Blair Ramírez ZamoraNoch keine Bewertungen
- El312ali2017 1Dokument5 SeitenEl312ali2017 1JonasJosTlasjianoNoch keine Bewertungen
- DESARROLLO PRACTICA 1 Retenedor MuestreadorDokument11 SeitenDESARROLLO PRACTICA 1 Retenedor MuestreadorIsmael ReyesNoch keine Bewertungen
- Informe Previo 6Dokument9 SeitenInforme Previo 6LuisCabreraOroscoNoch keine Bewertungen
- Taller transformada Z en matlab: Polos, ceros y aplicación de teoremasDokument4 SeitenTaller transformada Z en matlab: Polos, ceros y aplicación de teoremasAlejandro RiosNoch keine Bewertungen
- Lab Nº6 - Respuesta en Frecuencia - 2021 - ParDokument3 SeitenLab Nº6 - Respuesta en Frecuencia - 2021 - ParEsteban MontesNoch keine Bewertungen
- Análisis lugar raíces sistema controlDokument35 SeitenAnálisis lugar raíces sistema controlJUAN REYES TRONCOSONoch keine Bewertungen
- Herramientas de Orientación EspacialDokument10 SeitenHerramientas de Orientación Espacialjosue infantasNoch keine Bewertungen
- Antenas Fractales 1Dokument25 SeitenAntenas Fractales 1Anonymous ptbxq4wqjSNoch keine Bewertungen
- Oscilador de Barrido BwoDokument2 SeitenOscilador de Barrido BwoJosue AparicioNoch keine Bewertungen
- Problemas Convertidores DC-DCDokument9 SeitenProblemas Convertidores DC-DCJherson Miranda CabanillasNoch keine Bewertungen
- Lab 11Dokument7 SeitenLab 11Jose Fabrizio Pro ValdiviaNoch keine Bewertungen
- Respuesta en frecuencia de sistemas discretos con MatlabDokument9 SeitenRespuesta en frecuencia de sistemas discretos con MatlabFelipe Blair Ramírez ZamoraNoch keine Bewertungen
- Conversor AC-AC con TRIAC y cicloconvertidorDokument14 SeitenConversor AC-AC con TRIAC y cicloconvertidorAlejandra RoqueNoch keine Bewertungen
- Ejercicios NyquistDokument19 SeitenEjercicios Nyquistchiquitodeoz92Noch keine Bewertungen
- 3-Discretizacion de Una Funcion ContinuaDokument2 Seiten3-Discretizacion de Una Funcion ContinuaÓscar RiveraNoch keine Bewertungen
- Problemas Corte 1Dokument20 SeitenProblemas Corte 1juan ferreiraNoch keine Bewertungen
- Decodificador de Tonos - MatlabDokument2 SeitenDecodificador de Tonos - MatlabLuis David NicolaldeNoch keine Bewertungen
- Practica 2 EstadisticaDokument8 SeitenPractica 2 EstadisticaFernando Choque PumaNoch keine Bewertungen
- Manejo de TemporizadoresDokument11 SeitenManejo de TemporizadoresAdrian Del CastilloNoch keine Bewertungen
- Informe Final 1Dokument5 SeitenInforme Final 1Pedro Calixtro SotoNoch keine Bewertungen
- Tarea N5Dokument11 SeitenTarea N5Victor HugoNoch keine Bewertungen
- Codificador de Redundancia Cíclica de 8 Bits en FPGADokument2 SeitenCodificador de Redundancia Cíclica de 8 Bits en FPGAJuancho's MuñozNoch keine Bewertungen
- Informe Practica Nº1Dokument5 SeitenInforme Practica Nº1Danilo0% (1)
- Ejemplo en Matlab de Arreglos de AntenasDokument19 SeitenEjemplo en Matlab de Arreglos de AntenasJim VazquezNoch keine Bewertungen
- Labo 4Dokument35 SeitenLabo 4David Justiniano Chayña HanccoNoch keine Bewertungen
- Laboratorio3 SCDDokument55 SeitenLaboratorio3 SCDAlejandra RoqueNoch keine Bewertungen
- Transformada Z y sistemas de control digitalDokument13 SeitenTransformada Z y sistemas de control digitalPatrick Gilbert De la Cruz FloresNoch keine Bewertungen
- Lab 2Dokument45 SeitenLab 2Lenny RayssaNoch keine Bewertungen
- Examenes SimulaciónDokument28 SeitenExamenes SimulaciónahsimNoch keine Bewertungen
- Informe Final Final SCD - MoscosoDokument12 SeitenInforme Final Final SCD - Moscosofabriziod16Noch keine Bewertungen
- Laboratorio 3 - Galdamez, MoralesDokument4 SeitenLaboratorio 3 - Galdamez, MoralesSamuel RodriguezNoch keine Bewertungen
- Semin Control DiscretoDokument10 SeitenSemin Control DiscretoDorian HidalgoNoch keine Bewertungen
- Transformada Z Control 3Dokument22 SeitenTransformada Z Control 3Kevin Falero MontesNoch keine Bewertungen
- Control de velocidad de motores DVDDokument9 SeitenControl de velocidad de motores DVDGademara100% (1)
- Laboratorio 3 PDFDokument4 SeitenLaboratorio 3 PDFLiiliibeth GoonzálezNoch keine Bewertungen
- Laboratorio 3Dokument4 SeitenLaboratorio 3Liiliibeth GoonzálezNoch keine Bewertungen
- Examen de Seguridad de PolíticasDokument1 SeiteExamen de Seguridad de PolíticasVictor CondoriNoch keine Bewertungen
- Corr - Paper CongresoDokument6 SeitenCorr - Paper CongresoVictor CondoriNoch keine Bewertungen
- Curso RCM Facilitadores INGEMAN Virtual Ss 2021Dokument95 SeitenCurso RCM Facilitadores INGEMAN Virtual Ss 2021Victor CondoriNoch keine Bewertungen
- Formato de Reporte 05 - Lazos de ControlDokument1 SeiteFormato de Reporte 05 - Lazos de ControlVictor CondoriNoch keine Bewertungen
- Fuga de gas en tubería KT2 del HEADokument5 SeitenFuga de gas en tubería KT2 del HEAVictor CondoriNoch keine Bewertungen
- Grua 8/3 falla rielDokument6 SeitenGrua 8/3 falla rielVictor CondoriNoch keine Bewertungen
- Propuesta Mantenimiento Centrado en La Confiabilidad Horno Eléctrico - Liderazgo - Rev1Dokument14 SeitenPropuesta Mantenimiento Centrado en La Confiabilidad Horno Eléctrico - Liderazgo - Rev1Victor CondoriNoch keine Bewertungen
- Ejemplo Comisiomianeto Lazo Control XS635-320-PTC02-J21-00058Dokument1 SeiteEjemplo Comisiomianeto Lazo Control XS635-320-PTC02-J21-00058Victor CondoriNoch keine Bewertungen
- Control de GarajeDokument1 SeiteControl de GarajeVictor CondoriNoch keine Bewertungen
- Control de GarajeDokument1 SeiteControl de GarajeVictor CondoriNoch keine Bewertungen
- Control de GarajeDokument1 SeiteControl de GarajeVictor CondoriNoch keine Bewertungen
- Info Lab2Dokument8 SeitenInfo Lab2Victor CondoriNoch keine Bewertungen
- Control de GarajeDokument1 SeiteControl de GarajeVictor CondoriNoch keine Bewertungen
- Lab2 Mandos NeumáticosDokument9 SeitenLab2 Mandos NeumáticosVictor CondoriNoch keine Bewertungen
- TRABAJODokument12 SeitenTRABAJOVictor CondoriNoch keine Bewertungen
- Sistemas Termo-HidráulicosDokument25 SeitenSistemas Termo-HidráulicosVictor CondoriNoch keine Bewertungen
- Laboratorio 1 SCDDokument37 SeitenLaboratorio 1 SCDVictor CondoriNoch keine Bewertungen
- Laboratorio PERIFERICOS DE PLACA CONTROLADORA MSP432P401RDokument10 SeitenLaboratorio PERIFERICOS DE PLACA CONTROLADORA MSP432P401RVictor CondoriNoch keine Bewertungen
- Análisis y Simulación de Sistema Discreto Con Matlab/SimulinkDokument18 SeitenAnálisis y Simulación de Sistema Discreto Con Matlab/SimulinkVictor CondoriNoch keine Bewertungen
- Sturm LiouvilleDokument4 SeitenSturm LiouvilleFulvio JoséNoch keine Bewertungen
- Probabilidades y distribuciones binomiales en control estadístico de procesosDokument16 SeitenProbabilidades y distribuciones binomiales en control estadístico de procesosMauricio Carlos Ramirez PayéNoch keine Bewertungen
- Señales&Sistemas Richard BaraniukDokument346 SeitenSeñales&Sistemas Richard BaraniukJesus ContrerasNoch keine Bewertungen
- ClaseGV7 8Dokument10 SeitenClaseGV7 8SIMON LOPEZ ARCILANoch keine Bewertungen
- GeometriaDokument24 SeitenGeometriaAna YaniNoch keine Bewertungen
- Algebra Vacacional 2023 N°3Dokument8 SeitenAlgebra Vacacional 2023 N°3Carlos Maldonado IbañezNoch keine Bewertungen
- Pseudocodigo CiclosDokument25 SeitenPseudocodigo CiclosAriadna VillanuevaNoch keine Bewertungen
- Clase 09Dokument11 SeitenClase 09Hallowdark Revolution14Noch keine Bewertungen
- Cálculo Integral - Guía IDokument40 SeitenCálculo Integral - Guía IAbraham RíosNoch keine Bewertungen
- Investigacion de OperacionesDokument15 SeitenInvestigacion de OperacionesAmabilis Fernando SanchezNoch keine Bewertungen
- Criterios de Convergencia IDokument20 SeitenCriterios de Convergencia ILuisa Fernanda RojasNoch keine Bewertungen
- Integración Numérica PDFDokument53 SeitenIntegración Numérica PDFgoyo2kNoch keine Bewertungen
- Teorema de BayesDokument2 SeitenTeorema de BayesLizeth Maria lizarazoNoch keine Bewertungen
- Apuntes de Clase - Algebra SuperiorDokument28 SeitenApuntes de Clase - Algebra SuperiorjessicaNoch keine Bewertungen
- Ecuaciones Diferenciales No Resueltas Con Respecto A La Primera DerivadaDokument14 SeitenEcuaciones Diferenciales No Resueltas Con Respecto A La Primera DerivadaXavier Yuquilema100% (2)
- Iel-435-T PDFDokument40 SeitenIel-435-T PDFCarlos Enrique RodriguezNoch keine Bewertungen
- Matemática I Teorías de Conjuntos Conjuntos: NotacionDokument10 SeitenMatemática I Teorías de Conjuntos Conjuntos: NotacionYan ChavezNoch keine Bewertungen
- Método de La Regla Falsa (O Falsa Posición)Dokument41 SeitenMétodo de La Regla Falsa (O Falsa Posición)berthingNoch keine Bewertungen
- Antologia de Matematicas IVDokument92 SeitenAntologia de Matematicas IVMiriam GaliciaNoch keine Bewertungen
- Trabajo Colaborativo 2 - Ecuaciones Lineales e Interpolación - G3Dokument24 SeitenTrabajo Colaborativo 2 - Ecuaciones Lineales e Interpolación - G3Andrea PachecoNoch keine Bewertungen
- 08d Teorema de BayesDokument25 Seiten08d Teorema de BayesVIANETH ANAIS MALLMA VILLANUEVANoch keine Bewertungen
- Semana 11. La RectaDokument21 SeitenSemana 11. La RectaLuna DryNoch keine Bewertungen
- SOL - Adm - UNI - Mat (T)Dokument19 SeitenSOL - Adm - UNI - Mat (T)miguelrojash6683Noch keine Bewertungen
- Convolucin DiscretaDokument1 SeiteConvolucin DiscretaLucho CalderonNoch keine Bewertungen
- Conjuntos Parcialmente Ordenados y ReticulosDokument25 SeitenConjuntos Parcialmente Ordenados y ReticulosAITONoch keine Bewertungen
- SESION 4 Curvas ConicasDokument30 SeitenSESION 4 Curvas ConicasMtm MtacillamNoch keine Bewertungen
- Algoritmos de Reemplazo de PaginasDokument9 SeitenAlgoritmos de Reemplazo de PaginasJavier LiveratoNoch keine Bewertungen
- Ejercicios 02 Dinamica Particula 2023 RESUELTOSDokument6 SeitenEjercicios 02 Dinamica Particula 2023 RESUELTOScelia.savra.clementeNoch keine Bewertungen
- F4 Números DifusosDokument13 SeitenF4 Números DifusosALFONSO ROJAS ROMERONoch keine Bewertungen
- Ecuaciones y funciones exponenciales y logarítmicasDokument46 SeitenEcuaciones y funciones exponenciales y logarítmicasluisNoch keine Bewertungen