Das könnte Ihnen auch gefallen
- Topics:: Mid-Point Circle Algorithm, Filling Algorithms & PolygonsDokument34 SeitenTopics:: Mid-Point Circle Algorithm, Filling Algorithms & PolygonsazmiNoch keine Bewertungen
- Q.) Explain Scan Line Algorithm of Polygon ClippingDokument18 SeitenQ.) Explain Scan Line Algorithm of Polygon ClippingJay BhakharNoch keine Bewertungen
- Computer Graphics: Indian Institute OF TechnologyDokument23 SeitenComputer Graphics: Indian Institute OF TechnologyNaresh MehraNoch keine Bewertungen
- CG Unit 3Dokument18 SeitenCG Unit 3Kuldeep SharmaNoch keine Bewertungen
- Cyrus BeckDokument32 SeitenCyrus BeckLaraib RasheedNoch keine Bewertungen
- Implementation of Circle, Line and Ellipse Drawing AlgorithmDokument35 SeitenImplementation of Circle, Line and Ellipse Drawing AlgorithmPavithra RajaramNoch keine Bewertungen
- 351CS63 - AK - Computer Graphics (Weekend)Dokument17 Seiten351CS63 - AK - Computer Graphics (Weekend)Felix MdazepaNoch keine Bewertungen
- Circle Drawing AlgorithmDokument26 SeitenCircle Drawing AlgorithmSatyam KrishnaNoch keine Bewertungen
- Cs1360 - Graphics and Multimedia LaboratoryDokument76 SeitenCs1360 - Graphics and Multimedia LaboratoryfeliejuNoch keine Bewertungen
- Computer GraphicsDokument59 SeitenComputer GraphicsKanika KadianNoch keine Bewertungen
- Ellipse AlgoDokument5 SeitenEllipse AlgoLakshayNoch keine Bewertungen
- Lecture 3 Circle Mid PointDokument49 SeitenLecture 3 Circle Mid PointAbdelRahman MahmoudNoch keine Bewertungen
- CircleDokument35 SeitenCircleNadeem ShoukatNoch keine Bewertungen
- ClippingDokument45 SeitenClippingLalu SaudNoch keine Bewertungen
- Nov/Dec 2008 CS1354 Answer Key B.E / B.Tech Degree Examination Nov/Dec 2008 R 3261 CS1354 Computer Graphics and Multimedia Part ADokument10 SeitenNov/Dec 2008 CS1354 Answer Key B.E / B.Tech Degree Examination Nov/Dec 2008 R 3261 CS1354 Computer Graphics and Multimedia Part AgspriyadarshiniNoch keine Bewertungen
- 2dviewing and ClippingDokument34 Seiten2dviewing and ClippingKyle M. EstanislaoNoch keine Bewertungen
- Unit-3 Scan Line Conversion AlgorithmDokument25 SeitenUnit-3 Scan Line Conversion AlgorithmBinod AdhikariNoch keine Bewertungen
- Group 6-Clipping Line and Polygon Clipping AlgorithmDokument11 SeitenGroup 6-Clipping Line and Polygon Clipping AlgorithmPrecious OdediranNoch keine Bewertungen
- CG Full SemDokument48 SeitenCG Full SemsaiNoch keine Bewertungen
- ME401T CAD Ellipse Algorithm - 5Dokument29 SeitenME401T CAD Ellipse Algorithm - 5AnuragShrivastavNoch keine Bewertungen
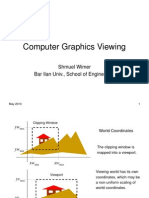
- Computer Graphics Viewing: Shmuel Wimer Bar Ilan Univ., School of EngineeringDokument86 SeitenComputer Graphics Viewing: Shmuel Wimer Bar Ilan Univ., School of EngineeringSabareesan SubramanianNoch keine Bewertungen
- Computer GraphisDokument7 SeitenComputer GraphisAlbin Ps PlappallilNoch keine Bewertungen
- Unit I Output Primitives SUBJECT: Graphics and Multimedia Subject Code: CS1354 Year & Sem: III&VI Part A (2 Marks)Dokument10 SeitenUnit I Output Primitives SUBJECT: Graphics and Multimedia Subject Code: CS1354 Year & Sem: III&VI Part A (2 Marks)gayathiridevirNoch keine Bewertungen
- Computer Graphics Lab Manual For IV CSEDokument67 SeitenComputer Graphics Lab Manual For IV CSEGopal RamNoch keine Bewertungen
- MidPointCircle DrawingDokument43 SeitenMidPointCircle DrawingMazharulislamNoch keine Bewertungen
- Bresenham: Circle Drawing AlgorithmDokument31 SeitenBresenham: Circle Drawing AlgorithmRaju RanjanNoch keine Bewertungen
- 1.how Can Scaling With Respect To A Point P (.X, y Z) Be Defined in Terms of Scaling With Respect To The Origin?Dokument16 Seiten1.how Can Scaling With Respect To A Point P (.X, y Z) Be Defined in Terms of Scaling With Respect To The Origin?LoveBabbarNoch keine Bewertungen
- 2D ClippingDokument6 Seiten2D ClippingJithendra NathNoch keine Bewertungen
- Output Primitives: Dr. S.M. MalaekDokument52 SeitenOutput Primitives: Dr. S.M. MalaekPeta SureshNoch keine Bewertungen
- Loading FrameDokument15 SeitenLoading FramejayanthikrishnanNoch keine Bewertungen
- Computer Graphics Circle Drawing TechniquesDokument45 SeitenComputer Graphics Circle Drawing TechniquesNusrat UllahNoch keine Bewertungen
- Clipping: - 4 2-Dimensional ViewingDokument7 SeitenClipping: - 4 2-Dimensional ViewingroniNoch keine Bewertungen
- Unit-1.2.4 Mid-Point Circle DrawingDokument21 SeitenUnit-1.2.4 Mid-Point Circle Drawing20BCA1382 GYAN VARDHANNoch keine Bewertungen
- Computer Graphics Lab ManualDokument114 SeitenComputer Graphics Lab ManualKhushbu MauryaNoch keine Bewertungen
- DDA & BRESENHAMS, Circle (Mid Point Approch)Dokument36 SeitenDDA & BRESENHAMS, Circle (Mid Point Approch)varunmundaleNoch keine Bewertungen
- Midpoint Circle AlgorithmDokument11 SeitenMidpoint Circle AlgorithmKalaivani D100% (1)
- Cyrus Beck - IIDokument27 SeitenCyrus Beck - IILaraib RasheedNoch keine Bewertungen
- Circle Drawing AlgorithmDokument7 SeitenCircle Drawing AlgorithmMurali Mohan ReddyNoch keine Bewertungen
- Practice ProblemsDokument12 SeitenPractice ProblemsTHAKUR SAHABNoch keine Bewertungen
- Computer Graphics Lab ManualDokument107 SeitenComputer Graphics Lab ManualFemilaGoldy79% (14)
- Line AlgorithmDokument62 SeitenLine AlgorithmAnonymous p8bHAAxNoch keine Bewertungen
- The Theory of Cross Point Regions With Ideal Cross Point Regions For Medical Image CompressionDokument5 SeitenThe Theory of Cross Point Regions With Ideal Cross Point Regions For Medical Image CompressionBảo Huy Nguyễn VũNoch keine Bewertungen
- Root Locus Method 2Dokument33 SeitenRoot Locus Method 2Umasankar ChilumuriNoch keine Bewertungen
- Explain Following Terms: Prepare These Questions. It Will Help You To Solve Terminal PaperDokument12 SeitenExplain Following Terms: Prepare These Questions. It Will Help You To Solve Terminal PaperSami U. KhanNoch keine Bewertungen
- Assnmt Geometric AlgorithmsDokument21 SeitenAssnmt Geometric AlgorithmsZobahaa HorunkuNoch keine Bewertungen
- Module 2Dokument9 SeitenModule 2vinuvipeeshNoch keine Bewertungen
- The AES AlgorithmDokument29 SeitenThe AES Algorithmapi-3701346100% (2)
- Aa Seminar - SeminarDokument25 SeitenAa Seminar - Seminarnikmay2604Noch keine Bewertungen
- Computer Graphics and MultimediaDokument3 SeitenComputer Graphics and Multimediashivrajchangle00Noch keine Bewertungen
- Graphics ReportDokument20 SeitenGraphics ReportAkriti KcNoch keine Bewertungen
- Name: Pranav G Dasgaonkar Roll No: 70 CLASS: 8 (CMPN-2) CG Experiment No: 10Dokument16 SeitenName: Pranav G Dasgaonkar Roll No: 70 CLASS: 8 (CMPN-2) CG Experiment No: 10shubham chutkeNoch keine Bewertungen
- (2 Hours) Total Marks: 75: Cathode Ray TubeDokument25 Seiten(2 Hours) Total Marks: 75: Cathode Ray TubeNilesh GuptaNoch keine Bewertungen
- I2IT Cyclic Block CodesDokument46 SeitenI2IT Cyclic Block CodesAbhijit V ChitreNoch keine Bewertungen
- 2.3 Scan Conversion MathDokument27 Seiten2.3 Scan Conversion MathTiktok IndiaNoch keine Bewertungen
- Robotics Lab Lecture #5: Purpose of This LectureDokument5 SeitenRobotics Lab Lecture #5: Purpose of This LectureSonosoNoch keine Bewertungen
- Bresenham N Circle AlgorithmDokument21 SeitenBresenham N Circle AlgorithmSOWMYANoch keine Bewertungen
- Lovely Professional University: DeclarationDokument5 SeitenLovely Professional University: DeclarationShekhar RanaNoch keine Bewertungen
- CG Notes All UnitsDokument172 SeitenCG Notes All UnitsramalingasaravananNoch keine Bewertungen
- linedrawingBresenhamCirclesAndPolygons by KumbhkarDokument47 SeitenlinedrawingBresenhamCirclesAndPolygons by KumbhkarmkumbhcarNoch keine Bewertungen
- Advanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionVon EverandAdvanced Electric Circuits: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNoch keine Bewertungen
- Naadi Titbits Rules ...Dokument4 SeitenNaadi Titbits Rules ...creativeNoch keine Bewertungen
- Pav Bhaji Recipe - How To Make Mumbai Pav BDokument1 SeitePav Bhaji Recipe - How To Make Mumbai Pav BcreativeNoch keine Bewertungen
- Peach Salsa Recipe, How To Make Peach SalsaDokument1 SeitePeach Salsa Recipe, How To Make Peach SalsacreativeNoch keine Bewertungen
- Besan Chilla Recipe (Gram Flour Pancakes)Dokument1 SeiteBesan Chilla Recipe (Gram Flour Pancakes)creativeNoch keine Bewertungen
- Thakkali Thokku Recipe, Tomato Thokku RecipeDokument1 SeiteThakkali Thokku Recipe, Tomato Thokku RecipecreativeNoch keine Bewertungen
- Idli Recipe - How To Make Idli BatterDokument1 SeiteIdli Recipe - How To Make Idli BattercreativeNoch keine Bewertungen
- Taurus - Dates, Traits, & More PDFDokument6 SeitenTaurus - Dates, Traits, & More PDFcreativeNoch keine Bewertungen
- Titbits of VarahmitraDokument8 SeitenTitbits of Varahmitracreative100% (1)
- Registration PreviewDokument1 SeiteRegistration PreviewcreativeNoch keine Bewertungen
- LionDokument8 SeitenLioncreativeNoch keine Bewertungen
- Instructions To Candidates: 1. FeesDokument1 SeiteInstructions To Candidates: 1. FeesMoorthi DemoNoch keine Bewertungen
- Aditya Hridayam: - The Heart of Aditya (The Sun God)Dokument9 SeitenAditya Hridayam: - The Heart of Aditya (The Sun God)creativeNoch keine Bewertungen
- Vedic Astrology KN RaoDokument5 SeitenVedic Astrology KN RaocreativeNoch keine Bewertungen
- Notification Special ExamsDokument3 SeitenNotification Special ExamsAshlin AarthiNoch keine Bewertungen
- Congratulations!!!!!!!!Dokument2 SeitenCongratulations!!!!!!!!kar88runNoch keine Bewertungen
- Birth Data and Horoscope of 20000 Celebrities, Horoscopes For Astrological Research - Astro-DatabankDokument3 SeitenBirth Data and Horoscope of 20000 Celebrities, Horoscopes For Astrological Research - Astro-DatabankcreativeNoch keine Bewertungen
- Birth Data and Horoscope of 20000 Celebrities, Horoscopes For Astrological Research - Astro-DatabankDokument3 SeitenBirth Data and Horoscope of 20000 Celebrities, Horoscopes For Astrological Research - Astro-DatabankcreativeNoch keine Bewertungen
- Euro Truck Simulator ManualDokument28 SeitenEuro Truck Simulator ManualTeodor CimpocaNoch keine Bewertungen
- SamDokument2 SeitenSamcreativeNoch keine Bewertungen
- Windows XP - 7 KeysDokument5 SeitenWindows XP - 7 KeyscreativeNoch keine Bewertungen
- Aditya HridayamDokument11 SeitenAditya HridayamShanthakumari S S100% (4)
- Eswara NadiDokument89 SeitenEswara NadiSolar Ponnu Muthu100% (1)
- AdiDokument9 SeitenAdicreativeNoch keine Bewertungen
- 5 Reasons People Have Low Self-Confidence - Psychology TodayDokument5 Seiten5 Reasons People Have Low Self-Confidence - Psychology TodaycreativeNoch keine Bewertungen
- Computer GraphicsDokument63 SeitenComputer GraphicsKour NeetuNoch keine Bewertungen
- Wa0004 PDFDokument20 SeitenWa0004 PDFAlokdev MishraNoch keine Bewertungen
- Smart Steam EmuDokument13 SeitenSmart Steam EmuFrank BermeoNoch keine Bewertungen
- Aucr 2013Dokument82 SeitenAucr 2013nithyananthankNoch keine Bewertungen
- Manual de Euro Truck Simulator 2Dokument12 SeitenManual de Euro Truck Simulator 2gato77777770% (1)
- Engineering Drawing PDFDokument173 SeitenEngineering Drawing PDFWiseman SiriroNoch keine Bewertungen
- DRAFTINGDokument23 SeitenDRAFTINGjorolan.annabelleNoch keine Bewertungen
- BE - 1 Lecture Notes 2 Introduction CompleteDokument11 SeitenBE - 1 Lecture Notes 2 Introduction CompleteRaymund Joshua Pre�aNoch keine Bewertungen
- محاضرة رسم المجسم+ الشكل البيضاويDokument14 Seitenمحاضرة رسم المجسم+ الشكل البيضاويMohammed GhisheerNoch keine Bewertungen
- Graphicscourse00willrich PDFDokument318 SeitenGraphicscourse00willrich PDFChivalrous SpringNoch keine Bewertungen
- The Theory of Engineering DrawingDokument370 SeitenThe Theory of Engineering Drawingcocotess100% (1)
- Engineering Drawing - Lecture 1 Introduction PDFDokument26 SeitenEngineering Drawing - Lecture 1 Introduction PDFdharmender142Noch keine Bewertungen
- Lesson 3: TLE-Mechanical DraftingDokument8 SeitenLesson 3: TLE-Mechanical DraftingRai MasamuneNoch keine Bewertungen
- Tech Draw 8 First QuarterDokument19 SeitenTech Draw 8 First QuarterGian Franz TolentinoNoch keine Bewertungen
- Riley Drawing As TransformationsDokument12 SeitenRiley Drawing As TransformationsgabrielaNoch keine Bewertungen
- Technical Drafting Week 1Dokument7 SeitenTechnical Drafting Week 1Christopher GallegoNoch keine Bewertungen
- 3D Graphics and ProjectionsDokument24 Seiten3D Graphics and ProjectionsJohnNoch keine Bewertungen
- Pictorial Projection PDFDokument41 SeitenPictorial Projection PDFcadcam01Noch keine Bewertungen
- Oblique ProjectionDokument22 SeitenOblique Projectionapi-341200208Noch keine Bewertungen
- Engineering Drawing MCQ Prashantchaturvedi - Com 1Dokument24 SeitenEngineering Drawing MCQ Prashantchaturvedi - Com 1Nandan SarkarNoch keine Bewertungen
- Isometric DrawingDokument38 SeitenIsometric DrawingSanthan SalaiNoch keine Bewertungen
- Module 1Dokument15 SeitenModule 1Queenie Belle A. DuhaylongsodNoch keine Bewertungen
- EG (1) Term 1Dokument32 SeitenEG (1) Term 1saranyakalaiNoch keine Bewertungen
- CS6513-COMPUTER GRAPHICS LABORATORY-664424542-computer Graphics Lab Manual 2013 RegulationDokument77 SeitenCS6513-COMPUTER GRAPHICS LABORATORY-664424542-computer Graphics Lab Manual 2013 RegulationGanesh100% (1)
- Unit Iii Three-Dimensional: Cs 8092 Computer Graphics Iii Yr Vi Sem 2017 RegulationDokument40 SeitenUnit Iii Three-Dimensional: Cs 8092 Computer Graphics Iii Yr Vi Sem 2017 Regulationsathyaaaaa1Noch keine Bewertungen
- Freehand SketchingDokument14 SeitenFreehand SketchingJustine WilliamsNoch keine Bewertungen
- From 3D To 2D: Orthographic and Perspective Projection-Part 1Dokument34 SeitenFrom 3D To 2D: Orthographic and Perspective Projection-Part 1aqp1118179Noch keine Bewertungen
- US Navy Course - Blueprint Reading and Sketching NAVEDTRA 14040Dokument185 SeitenUS Navy Course - Blueprint Reading and Sketching NAVEDTRA 14040peterpaulwNoch keine Bewertungen
- St. Francis School, Mount Poinsur, Borivali (W), Mumbai Preliminary Examination 2 - Semester 2 2021-22 Class:X Date: 29/03/2022Dokument5 SeitenSt. Francis School, Mount Poinsur, Borivali (W), Mumbai Preliminary Examination 2 - Semester 2 2021-22 Class:X Date: 29/03/2022yuvraj keswaniNoch keine Bewertungen
- Second Periodical Test TLE VIII - Technical Drafting (Exploratory)Dokument5 SeitenSecond Periodical Test TLE VIII - Technical Drafting (Exploratory)Krizzie Jade CailingNoch keine Bewertungen
- Technical Drafting II With AutoCADDokument6 SeitenTechnical Drafting II With AutoCADPeter IvanovNoch keine Bewertungen
- PDFDokument30 SeitenPDFvcmadarsh50% (2)
- ProjectionDokument6 SeitenProjectionistiake zahanNoch keine Bewertungen
- Unit 7 EditedDokument32 SeitenUnit 7 EditedtadyNoch keine Bewertungen
- Oblique DrawingDokument46 SeitenOblique DrawingAina MiswanNoch keine Bewertungen