Das könnte Ihnen auch gefallen
- Construccion de Un VariadorDokument53 SeitenConstruccion de Un VariadorMorris150Noch keine Bewertungen
- Libro RetDokument116 SeitenLibro RetLina Dialy Uhibuki75% (4)
- CNC Quito - DesbloqueadoDokument115 SeitenCNC Quito - DesbloqueadoAgustin CalderaNoch keine Bewertungen
- TIC - Programa 1 - Mod 4 - Unid 1 PDFDokument43 SeitenTIC - Programa 1 - Mod 4 - Unid 1 PDFFreddy Mamani AtayupanquiNoch keine Bewertungen
- Cad-Cam Introduccion UpiisaDokument25 SeitenCad-Cam Introduccion UpiisayoshijaNoch keine Bewertungen
- Manual de Gestión de La CalidadDokument61 SeitenManual de Gestión de La CalidadOrlin HernandezNoch keine Bewertungen
- Cad-Cam Introduccion UpiisaDokument25 SeitenCad-Cam Introduccion UpiisayoshijaNoch keine Bewertungen
- Specs Motor Paso A Paso Nema34Dokument4 SeitenSpecs Motor Paso A Paso Nema34Freddy Mamani AtayupanquiNoch keine Bewertungen
- Simbolos de ElectricidadDokument4 SeitenSimbolos de ElectricidadFreddy Mamani AtayupanquiNoch keine Bewertungen
- Practica 04 - Practica 05Dokument2 SeitenPractica 04 - Practica 05Freddy Mamani AtayupanquiNoch keine Bewertungen
- Símbolos PDFDokument5 SeitenSímbolos PDFSalvador Deyvi RojasNoch keine Bewertungen
- Calculo de Circuitos Neumaticos PDFDokument5 SeitenCalculo de Circuitos Neumaticos PDFcalambres17100% (1)
- Rodamientos Lineales PDFDokument2 SeitenRodamientos Lineales PDFFreddy Mamani AtayupanquiNoch keine Bewertungen
- Husillo de BolasDokument1 SeiteHusillo de BolasFreddy Mamani AtayupanquiNoch keine Bewertungen
- 21 OptoacopladoresDokument7 Seiten21 OptoacopladoresМигель КастижоNoch keine Bewertungen
- Cad-Cam Introduccion UpiisaDokument25 SeitenCad-Cam Introduccion UpiisayoshijaNoch keine Bewertungen
- CNC Quito - DesbloqueadoDokument115 SeitenCNC Quito - DesbloqueadoAgustin CalderaNoch keine Bewertungen
- 1EQUIPOS DE Control de Fluidos PDFDokument96 Seiten1EQUIPOS DE Control de Fluidos PDFFreddy Mamani AtayupanquiNoch keine Bewertungen
- Caracteristicas de CalderoDokument1 SeiteCaracteristicas de CalderoFreddy Mamani AtayupanquiNoch keine Bewertungen
- Practica 04 - Practica 05 InformaticaDokument6 SeitenPractica 04 - Practica 05 InformaticaJavier Leon JachoNoch keine Bewertungen
- Ponenteselectronicos (4eso)Dokument35 SeitenPonenteselectronicos (4eso)Pablo LópezNoch keine Bewertungen
- Document PDFDokument293 SeitenDocument PDFFreddy Mamani AtayupanquiNoch keine Bewertungen
- Intro Ducci OnDokument15 SeitenIntro Ducci OnJuan Mauricio SilvaNoch keine Bewertungen
- Actuadores MicroDokument72 SeitenActuadores MicroMauricio BravoNoch keine Bewertungen
- 11Dokument8 Seiten11Freddy Mamani AtayupanquiNoch keine Bewertungen
- 5Dokument32 Seiten5Freddy Mamani AtayupanquiNoch keine Bewertungen
- GuiaDokument1 SeiteGuiaFreddy Mamani AtayupanquiNoch keine Bewertungen
- TP 101 PDFDokument40 SeitenTP 101 PDFEmilio Tamayo100% (1)
- Document PDFDokument293 SeitenDocument PDFFreddy Mamani AtayupanquiNoch keine Bewertungen
- Anexo Gastos Declaracion Jorge GozalezDokument36 SeitenAnexo Gastos Declaracion Jorge GozalezLuis cilfredoNoch keine Bewertungen
- Proyecto de Estufas SolarDokument6 SeitenProyecto de Estufas Solarlogan_taylorNoch keine Bewertungen
- 13.factibilidad Luz Del SurDokument1 Seite13.factibilidad Luz Del SurROSEMBERT DURAN SINCHENoch keine Bewertungen
- WEG Soluciones en Energia Solar 50029356 Catalogo EspanolDokument12 SeitenWEG Soluciones en Energia Solar 50029356 Catalogo EspanolpatorellNoch keine Bewertungen
- Trifasicos EjerciciosDokument3 SeitenTrifasicos EjerciciosVladimir Rodriguez MoraNoch keine Bewertungen
- Cal CuloDokument5 SeitenCal CuloFelipe Hernandez0% (1)
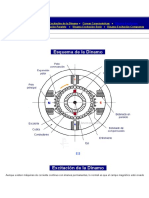
- Esquema de La DinamoDokument8 SeitenEsquema de La DinamoVictor JesusNoch keine Bewertungen
- Rendimiento y Regulacion de Auto TransformadorDokument5 SeitenRendimiento y Regulacion de Auto TransformadorHenrry ValderramaNoch keine Bewertungen
- DOSIFICACIÓN, MEDICIÓN, REGULACIÓN Y AUTOMATIZACIÓN Piscinas AstralpoolDokument32 SeitenDOSIFICACIÓN, MEDICIÓN, REGULACIÓN Y AUTOMATIZACIÓN Piscinas AstralpoolPiscinaspuntocomNoch keine Bewertungen
- CUESTIONES BREVES - Mod 5 y 6Dokument7 SeitenCUESTIONES BREVES - Mod 5 y 6BigAl SimalNoch keine Bewertungen
- Be 21Dokument17 SeitenBe 21lcsandovalr989Noch keine Bewertungen
- 3er Parcial: Energias AlternasDokument63 Seiten3er Parcial: Energias AlternasPérez Rodriguez EduardoNoch keine Bewertungen
- Ruiseñor CfeDokument2 SeitenRuiseñor CfemarekNoch keine Bewertungen
- Activida 5Dokument2 SeitenActivida 5INSOSALUD IPS100% (1)
- Turbo CargadorDokument2 SeitenTurbo CargadorIkram Ul100% (1)
- Proyecto Instalacion Paneles Solares en Estacion de ServicioDokument12 SeitenProyecto Instalacion Paneles Solares en Estacion de ServicioJaime Jara Hill TatoNoch keine Bewertungen
- 8d22de PDFDokument74 Seiten8d22de PDFfelipe choque100% (1)
- Estado MecánicoDokument1 SeiteEstado MecánicoYimmy Alexander Parra MarulandaNoch keine Bewertungen
- Plan de Mantenimiento de Un TransformadorDokument4 SeitenPlan de Mantenimiento de Un Transformadorblaiserborroso75% (4)
- Seguridad ElectricaDokument38 SeitenSeguridad ElectricaVibmec123Noch keine Bewertungen
- hjtwBMR34H jhJvcv4Dokument28 SeitenhjtwBMR34H jhJvcv4Wellington VicenteNoch keine Bewertungen
- Informe de Enrinado Del Motor Otto 4 TiempoDokument29 SeitenInforme de Enrinado Del Motor Otto 4 TiempoIo Soy100% (13)
- MEMORIAS DE CÁLCULO - BODEGA - GIRARDOTA - 2opcion PDFDokument9 SeitenMEMORIAS DE CÁLCULO - BODEGA - GIRARDOTA - 2opcion PDFDerianNoch keine Bewertungen
- Sistema MuiDokument40 SeitenSistema MuiJhonatan Michael Castillo Caballero67% (3)
- Central Hidroeléctrica QuimicaDokument3 SeitenCentral Hidroeléctrica QuimicaStephania PaucarNoch keine Bewertungen
- Taller de Trabajo Potencia y EnergiaDokument3 SeitenTaller de Trabajo Potencia y EnergiaArcesio Rafael Sanchez Bonilla50% (2)
- PLC LogoDokument13 SeitenPLC LogoSantiago Santi MuñozNoch keine Bewertungen
- Sector Electrico EcuatorianoDokument2 SeitenSector Electrico EcuatorianoJulio Galàrraga OrtizNoch keine Bewertungen
- Guia Ejercios Prueba 1 PDFDokument4 SeitenGuia Ejercios Prueba 1 PDFGoretty Puebla MunozNoch keine Bewertungen
- Potencial Hidroenergetico NorteDokument53 SeitenPotencial Hidroenergetico NorteGustavo Adolfo Lizares Arce100% (1)