Das könnte Ihnen auch gefallen
- Cours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFDokument17 SeitenCours DC3 - M2 - Modéliser Et Schématiser Le Comportement Cinématique PDFMOHSSINE KOUSSNoch keine Bewertungen
- Cours DC3 - M2 - Modéliser Et Schématiser Le Comportement CinématiqueDokument17 SeitenCours DC3 - M2 - Modéliser Et Schématiser Le Comportement CinématiqueCh AyaNoch keine Bewertungen
- ChainesFermees CoursDokument7 SeitenChainesFermees CoursMouhcine Ben MoussaNoch keine Bewertungen
- Cotation FonctionnelleDokument3 SeitenCotation FonctionnelleMIMFS100% (3)
- (CorSLCI) (CO) Correction Des SLCIDokument34 Seiten(CorSLCI) (CO) Correction Des SLCIBaptiste CapaiNoch keine Bewertungen
- TP Spe Serie 2 3 Structurel Dynamique CapsuleuseDokument2 SeitenTP Spe Serie 2 3 Structurel Dynamique CapsuleuseAlexandre LamNoch keine Bewertungen
- TP Spe Serie 2 3 Structurel Dynamique Pilote ElectriqueDokument2 SeitenTP Spe Serie 2 3 Structurel Dynamique Pilote ElectriqueAlexandre LamNoch keine Bewertungen
- Cours 03 - Loi Entree SortieDokument10 SeitenCours 03 - Loi Entree SortieEdgar Étape100% (1)
- DS2 1Dokument5 SeitenDS2 1Braxt MwIra GibecièreNoch keine Bewertungen
- Cours (CorSLCI) (CO) Correction - Des - SLCI PDFDokument34 SeitenCours (CorSLCI) (CO) Correction - Des - SLCI PDFhaitamNoch keine Bewertungen
- TP Spe Serie 2 3 Structurel Dynamique PortailDokument2 SeitenTP Spe Serie 2 3 Structurel Dynamique PortailAlexandre LamNoch keine Bewertungen
- Schéma Cinématique - 2020Dokument6 SeitenSchéma Cinématique - 2020Mohsen Laabidi100% (1)
- Cours AuDokument9 SeitenCours AuAdil MehdaryNoch keine Bewertungen
- Cinematique Du Solide TD3Dokument10 SeitenCinematique Du Solide TD3JosekennedyNoch keine Bewertungen
- 21 - Le Schéma Cinématique MinimaleDokument22 Seiten21 - Le Schéma Cinématique MinimaleManal El Matmour M'hairNoch keine Bewertungen
- Master Thesis PDFDokument136 SeitenMaster Thesis PDFTarak BenslimaneNoch keine Bewertungen
- 03 ParametrageDokument7 Seiten03 ParametrageDHia Ben AichaNoch keine Bewertungen
- Modelisation CinematiqueDokument16 SeitenModelisation CinematiqueAnonymous tNIpOVPyNoch keine Bewertungen
- Examen 2016 01 08 Aut1Dokument7 SeitenExamen 2016 01 08 Aut1Ben salah MaryemNoch keine Bewertungen
- CIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFDokument6 SeitenCIN06 TD Sujet - Déterminer La Loi Entrée-Sortie Cinématique D'un Réducteur Ou D'un Multiplicateur de Vitesse À Train Épicycloïdal PDFBouslama NNoch keine Bewertungen
- Layout Avancé-Chapitre2-2Dokument34 SeitenLayout Avancé-Chapitre2-2Hossam El KhiariNoch keine Bewertungen
- Livret de Travaux Dirigés de Télécommunications Numériques: To Cite This VersionDokument39 SeitenLivret de Travaux Dirigés de Télécommunications Numériques: To Cite This VersionMaïllice TionoNoch keine Bewertungen
- TP 1Dokument10 SeitenTP 1Med Hacen MoustaphaNoch keine Bewertungen
- td3 Ci1 Capteur CorDokument4 Seitentd3 Ci1 Capteur CorbecemNoch keine Bewertungen
- 3 - Mouvements, liaisons et schématisationDokument14 Seiten3 - Mouvements, liaisons et schématisationhubertholloway723Noch keine Bewertungen
- RobotDokument11 SeitenRobotFatima BouhajaNoch keine Bewertungen
- Cours CT 1 Schematisation CinematiqueDokument5 SeitenCours CT 1 Schematisation CinematiquePascal PonzoniNoch keine Bewertungen
- TATSAMBON - Méthode Des DéplacementsDokument22 SeitenTATSAMBON - Méthode Des Déplacementslando de chanceNoch keine Bewertungen
- Schema Cinematique CoursDokument4 SeitenSchema Cinematique CoursRihabBelgadaNoch keine Bewertungen
- Modélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxDokument7 SeitenModélisation Et Simulation Cinématique Du Robot Stäubli TX2 - 90 Sur Matlab Avec Robotics ToolboxOkacha AmraouyNoch keine Bewertungen
- Orca Share Media1672051556742 7013092532651141316Dokument44 SeitenOrca Share Media1672051556742 7013092532651141316Jik KkkNoch keine Bewertungen
- Chap06 OA 2023Dokument15 SeitenChap06 OA 2023dawoud.kenzariNoch keine Bewertungen
- Modélisation Des MécanismesDokument29 SeitenModélisation Des Mécanismeshidouriabdelmoumen9802100% (8)
- Grillage de PoutreDokument93 SeitenGrillage de PoutretarekhocineNoch keine Bewertungen
- Intro Synthese VHDLDokument37 SeitenIntro Synthese VHDLJawad MaalNoch keine Bewertungen
- 22 Modele-Scalaire Coronavirus-ProfDokument22 Seiten22 Modele-Scalaire Coronavirus-ProfAbdelhakim EbdelliNoch keine Bewertungen
- TP 04 - 2 Robot Ericc 3 - SujetDokument6 SeitenTP 04 - 2 Robot Ericc 3 - SujetzesfzsNoch keine Bewertungen
- Schéma Cinématique - 2020Dokument4 SeitenSchéma Cinématique - 2020Mohsen LaabidiNoch keine Bewertungen
- 12 - Le Schéma Cinématique MinimaleDokument31 Seiten12 - Le Schéma Cinématique MinimaleMahmoud Moncef100% (2)
- Cours 06 - Statique Des SolidesDokument10 SeitenCours 06 - Statique Des SolidesAnahi MaâroufNoch keine Bewertungen
- Representation D'etat Des Systemes Lineaires A Temps DiscretDokument16 SeitenRepresentation D'etat Des Systemes Lineaires A Temps Discretboukmes8235Noch keine Bewertungen
- 15 Cotation Fonctionnelle Acti p49 p57Dokument9 Seiten15 Cotation Fonctionnelle Acti p49 p57ESSOME ESSOME OLIVIER STEPHANENoch keine Bewertungen
- Cotation FonctionnelleDokument2 SeitenCotation Fonctionnellehocine100% (1)
- CR TP Modélisation Numérique PortiqueDokument17 SeitenCR TP Modélisation Numérique PortiqueThéo TessierNoch keine Bewertungen
- TP52 Barriere Sympact v2Dokument4 SeitenTP52 Barriere Sympact v2Virginie BoussaudNoch keine Bewertungen
- Chapitre3 FPGADokument36 SeitenChapitre3 FPGASaa AidNoch keine Bewertungen
- Chapitre3 FPGA Partie1Dokument16 SeitenChapitre3 FPGA Partie1saidfatani9Noch keine Bewertungen
- Apsim CNC Sii MP Psi 2020Dokument13 SeitenApsim CNC Sii MP Psi 2020Lamiaa CherkaNoch keine Bewertungen
- Cours MicrDokument30 SeitenCours MicrDOUNIANoch keine Bewertungen
- Statique 2009 Corrige StagiaireDokument82 SeitenStatique 2009 Corrige StagiaireOnguetou JulesNoch keine Bewertungen
- Exama CAO ZIANE BRAHIMDokument4 SeitenExama CAO ZIANE BRAHIMAbdelhak ZianeNoch keine Bewertungen
- 5 - Ordr Physique2Dokument9 Seiten5 - Ordr Physique2Jean-Pierre AwuNoch keine Bewertungen
- Cahier Exercices PID PDFDokument12 SeitenCahier Exercices PID PDFred100% (1)
- CoursDokument61 SeitenCoursBen Aissa ChokriNoch keine Bewertungen
- Cours Asserv Régulation Continus v1Dokument36 SeitenCours Asserv Régulation Continus v1Hi Quel Bou AzizNoch keine Bewertungen
- Cin CoursDokument54 SeitenCin CoursdesiréNoch keine Bewertungen
- 2011 2012 MP Cours Theorie Des Mecanismes PDFDokument12 Seiten2011 2012 MP Cours Theorie Des Mecanismes PDFNarjiss ShimiNoch keine Bewertungen
- Projet Analog VM VL DBDokument18 SeitenProjet Analog VM VL DBLéo Vander BekenNoch keine Bewertungen
- Traité d'économétrie financière: Modélisation financièreVon EverandTraité d'économétrie financière: Modélisation financièreNoch keine Bewertungen
- Detection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Von EverandDetection des collisions dans les jeux video 2D: avec C#5, WPF et Visual Studio 2013Noch keine Bewertungen
- TP PionDokument3 SeitenTP PionChokri AtefNoch keine Bewertungen
- TP FAO Eficn FraisageDokument5 SeitenTP FAO Eficn FraisageChokri AtefNoch keine Bewertungen
- Tutorial Catia v5R19Dokument70 SeitenTutorial Catia v5R19Chokri AtefNoch keine Bewertungen
- TD Rupture 2008Dokument7 SeitenTD Rupture 2008zakaryaNoch keine Bewertungen
- TracéDokument12 SeitenTracéChokri AtefNoch keine Bewertungen
- Tutorial Catia v5R19Dokument70 SeitenTutorial Catia v5R19Chokri AtefNoch keine Bewertungen
- A3035 PDFDokument16 SeitenA3035 PDFChokri AtefNoch keine Bewertungen
- Video 14 PDFDokument9 SeitenVideo 14 PDFChokri AtefNoch keine Bewertungen
- Correction Sujet 4Dokument9 SeitenCorrection Sujet 4Chokri Atef0% (3)
- 1 Dossier TechniqueDokument2 Seiten1 Dossier TechniqueChokri AtefNoch keine Bewertungen
- Pages Extraites de Examens Corriges Sciences Des MateriauxDokument4 SeitenPages Extraites de Examens Corriges Sciences Des MateriauxChokri AtefNoch keine Bewertungen
- 4 Etude de Cas Systemes HydroliqueDokument23 Seiten4 Etude de Cas Systemes Hydroliquesalma_herriNoch keine Bewertungen
- Engrenage CoursDokument2 SeitenEngrenage CourskololoNoch keine Bewertungen
- 14172674Dokument14 Seiten14172674Chokri AtefNoch keine Bewertungen
- 40 DS Moulage 2016 2017Dokument4 Seiten40 DS Moulage 2016 2017Chokri Atef67% (3)
- CATIA V5 DocumentDokument6 SeitenCATIA V5 DocumentChokri AtefNoch keine Bewertungen
- Page de Garde SDMDokument1 SeitePage de Garde SDMChokri AtefNoch keine Bewertungen
- 2 Dessin D'ensembleDokument1 Seite2 Dessin D'ensembleChokri AtefNoch keine Bewertungen
- CATIA V5 DocumentDokument6 SeitenCATIA V5 DocumentChokri AtefNoch keine Bewertungen
- Tournage PDFDokument45 SeitenTournage PDFChokri AtefNoch keine Bewertungen
- Devoir de Contrôle N°2 - Technologie - Bridage - 3ème Technique (2015-2016) MR Mnejja SlimDokument7 SeitenDevoir de Contrôle N°2 - Technologie - Bridage - 3ème Technique (2015-2016) MR Mnejja SlimChokri Atef100% (1)
- TD 3 Loi Entrée Sortie Par Fermeture GéométriqueDokument4 SeitenTD 3 Loi Entrée Sortie Par Fermeture GéométriqueChokri AtefNoch keine Bewertungen
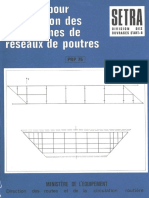
- Ce Document A Été Numérisé Par Le CRDP de Bordeaux Pour LaDokument6 SeitenCe Document A Été Numérisé Par Le CRDP de Bordeaux Pour LaChokri AtefNoch keine Bewertungen
- PDFDokument6 SeitenPDFChokri AtefNoch keine Bewertungen
- 3202540912-U41 PDFDokument13 Seiten3202540912-U41 PDFChokri AtefNoch keine Bewertungen
- Dimensionnement PDFDokument30 SeitenDimensionnement PDFnassim100% (2)
- Dimensionnement PDFDokument30 SeitenDimensionnement PDFnassim100% (2)
- 1 - Lois d'Entrée/Sortie: Lycée Gustave Eiffel de DijonDokument8 Seiten1 - Lois d'Entrée/Sortie: Lycée Gustave Eiffel de DijonChokri AtefNoch keine Bewertungen
- Annexe 1Dokument1 SeiteAnnexe 1Chokri AtefNoch keine Bewertungen
- CCMP-DR MP V6 1Dokument6 SeitenCCMP-DR MP V6 1Ahmed Med AbdellahiNoch keine Bewertungen
- Extract GAMME - 50 - 2017 - Streetzone-4-5 - 2Dokument4 SeitenExtract GAMME - 50 - 2017 - Streetzone-4-5 - 2qsdfjklkNoch keine Bewertungen
- Chap 2 AdDokument61 SeitenChap 2 AdAssane DabreNoch keine Bewertungen
- Brevet Blanc Maths 2013 SujetDokument3 SeitenBrevet Blanc Maths 2013 SujetLETUDIANT50% (8)
- Complexe Avec SolutionDokument5 SeitenComplexe Avec SolutionMohamed Badian Traore100% (2)
- VHNP17 18Dokument568 SeitenVHNP17 18valeNoch keine Bewertungen
- MMC Cours 04Dokument74 SeitenMMC Cours 04Redouane RedaNoch keine Bewertungen
- Pro Ma 2007 PDFDokument2 SeitenPro Ma 2007 PDFfabricelNoch keine Bewertungen
- Examen Local - 3eme ASC - Badr Eddine El Fatihi - 2020 (WWW - Pc1.ma)Dokument10 SeitenExamen Local - 3eme ASC - Badr Eddine El Fatihi - 2020 (WWW - Pc1.ma)Salma. gndNoch keine Bewertungen
- Exercices de Maths en cm2 A Imprimer en PDF 88Dokument25 SeitenExercices de Maths en cm2 A Imprimer en PDF 88houandjekoffiandre2001Noch keine Bewertungen
- Angles (5ème)Dokument4 SeitenAngles (5ème)MATHS - VIDEOSNoch keine Bewertungen
- Devoir 4 Eme M Mai 2021Dokument3 SeitenDevoir 4 Eme M Mai 2021Doaa ChatbriNoch keine Bewertungen
- 3 Controle Thales3ter PDFDokument3 Seiten3 Controle Thales3ter PDFsar0% (1)
- Fonctions Non LinéairesDokument29 SeitenFonctions Non LinéairesAdailton FreitasNoch keine Bewertungen
- Trigo Et Fonction CirculaireDokument7 SeitenTrigo Et Fonction CirculaireswallakNoch keine Bewertungen
- Cours MFDokument170 SeitenCours MFkimNoch keine Bewertungen
- Plaquette Des Cours Enau 2014-2015Dokument107 SeitenPlaquette Des Cours Enau 2014-2015Rochdy ZoghlamiNoch keine Bewertungen
- Bary CentreDokument17 SeitenBary Centremetalleux593100% (1)
- Les AngesDokument149 SeitenLes Angesarpita100% (3)
- Problemes - Corrigés Sur Fonctions NumériquesDokument36 SeitenProblemes - Corrigés Sur Fonctions Numériquesteninkone789Noch keine Bewertungen
- Maths Enig Me Express 14Dokument68 SeitenMaths Enig Me Express 14nomonamo100% (2)
- Courbes Et SurfacesDokument52 SeitenCourbes Et SurfacesAnonymous 4k3M837gKNoch keine Bewertungen
- Cahier de Texte - A362Dokument50 SeitenCahier de Texte - A362Lahcen BOUFOUSSNoch keine Bewertungen
- AT X Cours Hybride 07 10 2020Dokument20 SeitenAT X Cours Hybride 07 10 2020FAAL TAFANoch keine Bewertungen
- 2C RégDokument2 Seiten2C RégFlora AkeNoch keine Bewertungen
- 6 Correction Revisions Rentree Cinquieme GeometrieDokument25 Seiten6 Correction Revisions Rentree Cinquieme GeometrieModeste DegboeviNoch keine Bewertungen
- Maths Geom7eDokument77 SeitenMaths Geom7eOsman KantheNoch keine Bewertungen
- 09 Le Produit Scalaire Et Ses Applications PDFDokument19 Seiten09 Le Produit Scalaire Et Ses Applications PDFSamix KermiaNoch keine Bewertungen
- DunfordDokument8 SeitenDunfordKristina RomanovaNoch keine Bewertungen
- 3e Maths L03 RACINES CARREESDokument3 Seiten3e Maths L03 RACINES CARREESZehe BorisNoch keine Bewertungen