Das könnte Ihnen auch gefallen
- Mantenimiento del sistema de arranque del motor del vehículo. TMVG0209Von EverandMantenimiento del sistema de arranque del motor del vehículo. TMVG0209Bewertung: 1 von 5 Sternen1/5 (2)
- Acelerador ElectronicoDokument59 SeitenAcelerador ElectronicoLyla Albarado100% (7)
- Manual de Acelerador ElectronicoDokument57 SeitenManual de Acelerador Electronicojuan100% (1)
- Estructura Interna de La ECUDokument18 SeitenEstructura Interna de La ECUAlex Santiago GS100% (2)
- El Cuerpo de Aceleración ElectrónicoDokument6 SeitenEl Cuerpo de Aceleración ElectrónicoEduardo Benjamin Santiago Martinez100% (3)
- Bobina Dis y CopDokument13 SeitenBobina Dis y CopOrlando Martínez100% (1)
- Prueba y Diagnosticos de Sensores AutomotricesDokument6 SeitenPrueba y Diagnosticos de Sensores AutomotricesDaniel OroCam100% (5)
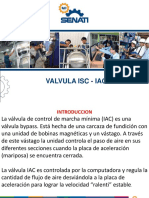
- Valvula Iac Control de RalentiDokument15 SeitenValvula Iac Control de Ralentiedge_575Noch keine Bewertungen
- El Sensor TpsDokument33 SeitenEl Sensor TpsMarcelo Alejandro Mallemaci100% (4)
- Señales Se Sensores Con OsciloscopioDokument18 SeitenSeñales Se Sensores Con OsciloscopioTavoMorocho75% (4)
- Tu Taller Mecanico Cuerpos de Aceleracion y Pedales ElectronicosDokument33 SeitenTu Taller Mecanico Cuerpos de Aceleracion y Pedales Electronicosalex100% (1)
- Presentación OBD1Dokument25 SeitenPresentación OBD1Io Soy50% (2)
- Emulatori Spa PDFDokument80 SeitenEmulatori Spa PDFLuisDelRioValdiviesoNoch keine Bewertungen
- Valores de Sensores AutomotricesDokument8 SeitenValores de Sensores AutomotricesFranchesca RobalinoNoch keine Bewertungen
- Tipos de TPSDokument3 SeitenTipos de TPSJuan JoseNoch keine Bewertungen
- Sistema de Control de Ralenti Del Tipo Valvula OnDokument4 SeitenSistema de Control de Ralenti Del Tipo Valvula Ontecnicogato27Noch keine Bewertungen
- Protocolos para La Comunicación OBD IIDokument3 SeitenProtocolos para La Comunicación OBD IIEduardo Benjamin Santiago Martinez100% (2)
- Mecanica Automotriz - Medicion de SensoresDokument31 SeitenMecanica Automotriz - Medicion de Sensoresjoana13r75% (4)
- Manual Tester Full V FinalDokument30 SeitenManual Tester Full V FinalJosè Reyes100% (2)
- Funcionamiento y Pruebas A La Válvula IAC de 4 Cables PDFDokument18 SeitenFuncionamiento y Pruebas A La Válvula IAC de 4 Cables PDFLuis Meza100% (1)
- Probador de Cuerpos de Aceleracion PDFDokument1 SeiteProbador de Cuerpos de Aceleracion PDFAnonymous f6yup175% (4)
- Sensor de Temperatura o ECTDokument4 SeitenSensor de Temperatura o ECTAlejandroNoch keine Bewertungen
- Mediciones Sobre Sensores NTC, PTC, Map y MafDokument19 SeitenMediciones Sobre Sensores NTC, PTC, Map y MafMarco Antonio Aduviri FernandezNoch keine Bewertungen
- PROBADOR DE VALVULAS IAC BypassDokument7 SeitenPROBADOR DE VALVULAS IAC BypassLuix TiradoNoch keine Bewertungen
- Siglas y Aberviaturas de Inyeccion Electronica GasolinaDokument19 SeitenSiglas y Aberviaturas de Inyeccion Electronica Gasolinaanon_683265281Noch keine Bewertungen
- Sensor TPSDokument9 SeitenSensor TPSLuis Trujillo Cadena100% (1)
- Sensor APP CaracteristicasDokument1 SeiteSensor APP CaracteristicasRicky SantiagoNoch keine Bewertungen
- Guia Rapida2 Conexiones (3) Probador de BobinasDokument19 SeitenGuia Rapida2 Conexiones (3) Probador de BobinasCarlos IparraguirreNoch keine Bewertungen
- Módulos de Encendido PDFDokument16 SeitenMódulos de Encendido PDFanderson jair100% (4)
- Sensor de Temperatura Del Refrigerante ECTDokument19 SeitenSensor de Temperatura Del Refrigerante ECTFausto LojaNoch keine Bewertungen
- Pulsador de Inyectores 1Dokument1 SeitePulsador de Inyectores 1Franco RHNoch keine Bewertungen
- Valvula IACDokument2 SeitenValvula IACmetanirvana100% (2)
- Maet42 U2 DR2Dokument20 SeitenMaet42 U2 DR2Felipe HenriquezNoch keine Bewertungen
- Sensor MAFDokument10 SeitenSensor MAFCarlos BeltránNoch keine Bewertungen
- Funcionamiento Computadora Automotriz PDFDokument4 SeitenFuncionamiento Computadora Automotriz PDFIkerGamer 051109100% (1)
- Sensor FRPDokument9 SeitenSensor FRPCarlos Beltrán100% (1)
- Direcion YarisDokument180 SeitenDirecion YarisKiko Gonzalez0% (1)
- Controlador de Motor de Pasos Como Una Valvula Iac de Un AutomovilDokument4 SeitenControlador de Motor de Pasos Como Una Valvula Iac de Un AutomovilDavid Novelo100% (3)
- Sensor de Poción Del CigüeñalDokument72 SeitenSensor de Poción Del CigüeñalEver AlayaNoch keine Bewertungen
- Sensor MAF 300Dokument20 SeitenSensor MAF 300raul ramirez100% (1)
- Señales de Entra y SalidaDokument13 SeitenSeñales de Entra y SalidamarceloNoch keine Bewertungen
- Simulador TpsDokument4 SeitenSimulador TpsRene CaMeNoch keine Bewertungen
- Probador de Cuerpos de Aceleracion Jag 2017 08 10Dokument1 SeiteProbador de Cuerpos de Aceleracion Jag 2017 08 10Hps Mexico100% (2)
- Probar El Módulo de Encendido y Bobina GMDokument6 SeitenProbar El Módulo de Encendido y Bobina GMalbert aquinoNoch keine Bewertungen
- Sensor VSSDokument9 SeitenSensor VSSCarlos Beltrán0% (2)
- Valvula Iac Control de RalentiDokument15 SeitenValvula Iac Control de Ralentiedge_575Noch keine Bewertungen
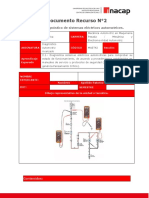
- Instituto Tecnológico Superior Central Técnico Nombre: Curso: Fecha: Tema: Funcionamiento de La EcuDokument4 SeitenInstituto Tecnológico Superior Central Técnico Nombre: Curso: Fecha: Tema: Funcionamiento de La EcuEsteban SevillaNoch keine Bewertungen
- 4.-Tema Acelerador ElectronicoDokument59 Seiten4.-Tema Acelerador ElectronicoJose Fernando Rodriguez100% (1)
- Acelerador ElectronicoDokument52 SeitenAcelerador ElectronicoJunior Aguiar100% (1)
- Sensor TPSDokument11 SeitenSensor TPSMaegli GodoyNoch keine Bewertungen
- Sensor de Revoluciones Por Minuto Del MotorDokument5 SeitenSensor de Revoluciones Por Minuto Del MotortonyNoch keine Bewertungen
- Tema 4 Diagnostico Acelerador Electronico 2Dokument33 SeitenTema 4 Diagnostico Acelerador Electronico 2jorge lopezNoch keine Bewertungen
- Imprimir Sensores y ActuadoresDokument17 SeitenImprimir Sensores y ActuadoresCardenas Infotep100% (1)
- Pedal Acelerador ElectronicoDokument11 SeitenPedal Acelerador ElectronicoJhon Jr Huaman100% (1)
- 01 TPS .Dokument12 Seiten01 TPS .Hery Moto'sNoch keine Bewertungen
- Cuestionario Del Sensor KsDokument10 SeitenCuestionario Del Sensor KsBenicio Morales CarbajalNoch keine Bewertungen
- Alimentacion 5toDokument71 SeitenAlimentacion 5topablo videlaNoch keine Bewertungen
- Inyeccion Elec, Gasolina Tps Ect IatDokument9 SeitenInyeccion Elec, Gasolina Tps Ect Iatjose swapNoch keine Bewertungen
- Sistema InductivoDokument22 SeitenSistema InductivoJoel J. Pomalaya Reategui100% (2)
- Sensores AutosDokument60 SeitenSensores AutosEduardo Altamirano Villalobos100% (2)
- Proy General MotorsDokument46 SeitenProy General Motorsisrael jorge torricoNoch keine Bewertungen
- Banco de Prueba y Limpieza de InyectoresDokument1 SeiteBanco de Prueba y Limpieza de Inyectoresisrael jorge torricoNoch keine Bewertungen
- Inyección de CombustibleDokument33 SeitenInyección de Combustibleisrael jorge torricoNoch keine Bewertungen
- Diesel Exposicion FiltrosDokument35 SeitenDiesel Exposicion Filtrosisrael jorge torricoNoch keine Bewertungen
- Israel CR.Dokument79 SeitenIsrael CR.israel jorge torricoNoch keine Bewertungen
- Osciladores de CristalDokument5 SeitenOsciladores de Cristalisrael jorge torricoNoch keine Bewertungen
- Reparación de Centralitas de AirbagDokument7 SeitenReparación de Centralitas de Airbagisrael jorge torricoNoch keine Bewertungen
- Multiplexado Protocolos de Comunicación DisteracionDokument16 SeitenMultiplexado Protocolos de Comunicación Disteracionisrael jorge torricoNoch keine Bewertungen
- Reparación de Centralitas de AirbagDokument4 SeitenReparación de Centralitas de Airbagisrael jorge torricoNoch keine Bewertungen
- Reparación de Centralitas de AirbagDokument4 SeitenReparación de Centralitas de Airbagisrael jorge torricoNoch keine Bewertungen
- Sistemas de Control de Aire AcondicionadoDokument68 SeitenSistemas de Control de Aire Acondicionadoisrael jorge torrico100% (3)
- RESISTENCIASDokument16 SeitenRESISTENCIASisrael jorge torricoNoch keine Bewertungen
- La Caja de VelocidadesDokument18 SeitenLa Caja de Velocidadesisrael jorge torricoNoch keine Bewertungen
- Caracteristicas de Las Llaves Transponders de La Marca ToyotaDokument26 SeitenCaracteristicas de Las Llaves Transponders de La Marca Toyotaisrael jorge torrico100% (5)
- Inyección Common RailDokument14 SeitenInyección Common Railisrael jorge torricoNoch keine Bewertungen
- Cilindros y Mecanismos Hidraulicos ExpoDokument27 SeitenCilindros y Mecanismos Hidraulicos Expoisrael jorge torrico100% (2)
- Seguridad de La Maquinaria PesadaDokument5 SeitenSeguridad de La Maquinaria Pesadaisrael jorge torricoNoch keine Bewertungen
- Sistema de Alarma e Inmovilizador Pasivo ExposicionDokument29 SeitenSistema de Alarma e Inmovilizador Pasivo Exposicionisrael jorge torrico81% (16)
- Sistema de Encendido DisDokument1 SeiteSistema de Encendido Disisrael jorge torricoNoch keine Bewertungen
- Ejercicios Resueltos de Circuitos HidráulicosDokument38 SeitenEjercicios Resueltos de Circuitos HidráulicosGuadalupe Hinostroza0% (3)
- Procedimiento de Seguridad Operación de Maquinaria PesadaDokument4 SeitenProcedimiento de Seguridad Operación de Maquinaria PesadaJuan Benavides71% (7)
- MoleDokument5 SeitenMoleisrael jorge torricoNoch keine Bewertungen
- Inyección Common RailDokument14 SeitenInyección Common Railisrael jorge torricoNoch keine Bewertungen
- Descripcion General de Los Sistemas de Conversion A Gas VehicularDokument25 SeitenDescripcion General de Los Sistemas de Conversion A Gas Vehicularisrael jorge torrico92% (12)
- Teorias Socioeconomicas Clasicas y ContemporaneasDokument27 SeitenTeorias Socioeconomicas Clasicas y Contemporaneasisrael jorge torrico0% (2)
- SembradorasDokument27 SeitenSembradorasisrael jorge torricoNoch keine Bewertungen
- Tractores Agricolas T. ExpoDokument45 SeitenTractores Agricolas T. Expoisrael jorge torrico50% (2)
- Ciclo OttoDokument22 SeitenCiclo Ottoisrael jorge torricoNoch keine Bewertungen
- Equipos e ImplementosDokument12 SeitenEquipos e Implementosisrael jorge torricoNoch keine Bewertungen
- Lineamiento Tecnico Calentadores A Fuego Directo DCO-SCM-LT-006Dokument291 SeitenLineamiento Tecnico Calentadores A Fuego Directo DCO-SCM-LT-006Cesar Omar Hernandez Ascencio0% (1)
- Grupo1, Fase2, Tarea7Dokument9 SeitenGrupo1, Fase2, Tarea7John Rojas AlarconNoch keine Bewertungen
- Especificaciones Del Motor MP8 PDFDokument5 SeitenEspecificaciones Del Motor MP8 PDFJorge CamacaroNoch keine Bewertungen
- Obtencion de EtinoDokument4 SeitenObtencion de EtinoRichard AnrangoNoch keine Bewertungen
- Material Lista Verificacion Componentes Puntos Servicio Tractores KomatsuDokument5 SeitenMaterial Lista Verificacion Componentes Puntos Servicio Tractores KomatsuolaffsebastianNoch keine Bewertungen
- CompresometroDokument20 SeitenCompresometrojuan llaguelNoch keine Bewertungen
- 5M Tema2Dokument31 Seiten5M Tema2Anyers Diaz ParedesNoch keine Bewertungen
- Clase 1, 2 Refinación de PetroleoDokument53 SeitenClase 1, 2 Refinación de PetroleoJairo AndresNoch keine Bewertungen
- ¿Cómo Mitigar El Creciente Precio Del Diésel?Dokument6 Seiten¿Cómo Mitigar El Creciente Precio Del Diésel?EjimenezSNoch keine Bewertungen
- Tractores: Usos y TiposDokument32 SeitenTractores: Usos y TiposJose Daniel Sigüeñas AcostaNoch keine Bewertungen
- Nissan Terrano II TD27Ti (R20) 2.7D 91kw (93-08) Motor-Prueba Componentes-oscilogramas-Bosch EDC MSA 15.5-HyDokument5 SeitenNissan Terrano II TD27Ti (R20) 2.7D 91kw (93-08) Motor-Prueba Componentes-oscilogramas-Bosch EDC MSA 15.5-Hypakiturbo2papeles100% (4)
- Toyota 1HD 4.2L 24VDokument6 SeitenToyota 1HD 4.2L 24VAlfonso Rectificador60% (5)
- Motor EW12J4 PV7404984Dokument49 SeitenMotor EW12J4 PV7404984Daniller anabalonNoch keine Bewertungen
- Metodologia de Electricidad y Magnetismo FINALDokument13 SeitenMetodologia de Electricidad y Magnetismo FINALPedro Garduza SosaNoch keine Bewertungen
- Diametro Optimo de Tuberia para El PoliductoDokument36 SeitenDiametro Optimo de Tuberia para El PoliductoMarcos Daniel Vargas Inochea100% (1)
- Manual de Maquina Cortadora de ConcretoDokument13 SeitenManual de Maquina Cortadora de ConcretoLuis Huarancca CahuanaNoch keine Bewertungen
- Indicadores de MantenimientoDokument52 SeitenIndicadores de MantenimientoWilly FloresNoch keine Bewertungen
- Inyeccion, Mantenimiento DieselDokument3 SeitenInyeccion, Mantenimiento Dieseldaniel solano pallarosoNoch keine Bewertungen
- Tarea Semana 5 TermodinamicaDokument8 SeitenTarea Semana 5 TermodinamicaRodrigo Curiante82% (11)
- Lol Te ML 02 EsDokument15 SeitenLol Te ML 02 EsElber BayonaNoch keine Bewertungen
- Primera Guia de Termodinámica (1) - 1Dokument4 SeitenPrimera Guia de Termodinámica (1) - 1xxzvicNoch keine Bewertungen
- Medidores de GasDokument16 SeitenMedidores de GasGuillermoNoch keine Bewertungen
- Manual Basico de Servicio para Emcpll PDFDokument12 SeitenManual Basico de Servicio para Emcpll PDFantonio barrera100% (1)
- Tipos de BujiasDokument4 SeitenTipos de BujiasEver MedinaNoch keine Bewertungen
- Mantención Compresor Sullair 900XHDokument6 SeitenMantención Compresor Sullair 900XHFreddy Martínez AvendañoNoch keine Bewertungen
- Guia de GasesDokument7 SeitenGuia de GasesrosmaNoch keine Bewertungen
- PROVEEDOCTDIC16OKDokument12 SeitenPROVEEDOCTDIC16OKLeonardo BorbonNoch keine Bewertungen
- PTS Transporte Carga y Descarga de LiqDokument7 SeitenPTS Transporte Carga y Descarga de Liqbruce3dNoch keine Bewertungen
- 3.1-FILTROS PARA Pesado Luber FainerDokument4 Seiten3.1-FILTROS PARA Pesado Luber Fainertonito raxNoch keine Bewertungen
- Cilindros, Lumbreras y PreparacionDokument12 SeitenCilindros, Lumbreras y Preparacionmariana jariego zambranoNoch keine Bewertungen