Das könnte Ihnen auch gefallen
- Notes On WL RatioDokument2 SeitenNotes On WL Ratiohenz Josh100% (1)
- Design ProjectDokument22 SeitenDesign ProjectRobert T KasumiNoch keine Bewertungen
- Machine Diagnosis PDFDokument97 SeitenMachine Diagnosis PDFVahid RezaeiNoch keine Bewertungen
- Bode Plot PDFDokument41 SeitenBode Plot PDFdolaNoch keine Bewertungen
- Gain & Phase Margin - Bode PlotDokument28 SeitenGain & Phase Margin - Bode PlotDeepthiNoch keine Bewertungen
- BJT and FET Frequency Response - Lec2Dokument51 SeitenBJT and FET Frequency Response - Lec2Toota TuttaNoch keine Bewertungen
- BJT Frequency Responce PDFDokument57 SeitenBJT Frequency Responce PDFAlpha RomeoNoch keine Bewertungen
- Sliding Mode ControlDokument12 SeitenSliding Mode ControlakhilvjNoch keine Bewertungen
- TMS320F28335 DSP Development BoardDokument6 SeitenTMS320F28335 DSP Development BoardDeepika SharmaNoch keine Bewertungen
- TCP in Wireless DomainDokument30 SeitenTCP in Wireless DomainMurugan Antham RNoch keine Bewertungen
- Compensation in Control SystemDokument10 SeitenCompensation in Control Systemshouvikchaudhuri0% (1)
- Analog Circuits: GATE EC Topic Wise QuestionsDokument50 SeitenAnalog Circuits: GATE EC Topic Wise Questionsdeepthi1993100% (1)
- Lecture 14, 15 StabilityDokument45 SeitenLecture 14, 15 StabilityHamza KhanNoch keine Bewertungen
- Vlsi-Chip Input and Output CircuitsDokument27 SeitenVlsi-Chip Input and Output CircuitsSrilatha KolliNoch keine Bewertungen
- Vtu Lab Manuals VlsiDokument79 SeitenVtu Lab Manuals VlsisrikanthuasNoch keine Bewertungen
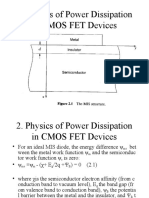
- Physics of Power Dissipation in CMOS FET DevicesDokument70 SeitenPhysics of Power Dissipation in CMOS FET DevicesPunith Gowda M BNoch keine Bewertungen
- Programmable Logic ControllersDokument220 SeitenProgrammable Logic ControllersAnees SujiNoch keine Bewertungen
- Compensator Design Using Bode PlotDokument18 SeitenCompensator Design Using Bode PlotHBNoch keine Bewertungen
- Power Electronics Wk4Dokument65 SeitenPower Electronics Wk4Pang MaronNoch keine Bewertungen
- Introduction To Embedded SystemsDokument50 SeitenIntroduction To Embedded SystemsAmbika NaikNoch keine Bewertungen
- Exp1 dSPACEDokument19 SeitenExp1 dSPACEVisheshNoch keine Bewertungen
- Switch Mode Power Supply and Switching RegulatorsDokument13 SeitenSwitch Mode Power Supply and Switching Regulatorsyuj oNoch keine Bewertungen
- PWM Based DC Motor Speed Control Using MicrocontrollerDokument8 SeitenPWM Based DC Motor Speed Control Using MicrocontrollertazebNoch keine Bewertungen
- Digital Control Systems (DCS) : Lecture-1-2 Lead CompensationDokument61 SeitenDigital Control Systems (DCS) : Lecture-1-2 Lead CompensationMeer Zafarullah NoohaniNoch keine Bewertungen
- 21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemDokument6 Seiten21-06-2021-1624264403-6-.-2. Engg - Voltage Based Control of Induction Motor Using Advanced Voice Recognition & Command SystemImpact JournalsNoch keine Bewertungen
- Control System Question BankDokument3 SeitenControl System Question Bankmanish_iitrNoch keine Bewertungen
- UJTDokument43 SeitenUJTRahul KiniNoch keine Bewertungen
- Control Systems K-NotesDokument33 SeitenControl Systems K-NotesvidhikhabyaNoch keine Bewertungen
- 9086 CMOS Analog Design Chapter 6Dokument24 Seiten9086 CMOS Analog Design Chapter 6Yogindr SinghNoch keine Bewertungen
- Activity 03Dokument11 SeitenActivity 03kennethNoch keine Bewertungen
- Case Study On Microprocessor and Assembly LanguageDokument7 SeitenCase Study On Microprocessor and Assembly LanguageTanjimun AfrinNoch keine Bewertungen
- Chapter3 BJT DC AnalysisDokument45 SeitenChapter3 BJT DC AnalysisbadaitimurNoch keine Bewertungen
- Difference Between Power and Small Signal DiodeDokument4 SeitenDifference Between Power and Small Signal DiodeMohamed IbrahemNoch keine Bewertungen
- Measurement of VelocityDokument59 SeitenMeasurement of VelocityYogeshBhatt100% (1)
- Questions & Answers On S-Domain AnalysisDokument33 SeitenQuestions & Answers On S-Domain Analysiskibrom atsbhaNoch keine Bewertungen
- Time Response AnalysisDokument43 SeitenTime Response AnalysisAkmal IsnaeniNoch keine Bewertungen
- Bode DiagramDokument6 SeitenBode DiagramAmir SamirNoch keine Bewertungen
- Linear Block Code MatlabDokument1 SeiteLinear Block Code MatlabsaisreeNoch keine Bewertungen
- Ee8391 - Electromagnetic Theory: Unit 1-Introduction Two MarksDokument43 SeitenEe8391 - Electromagnetic Theory: Unit 1-Introduction Two Markssignjpcoe0% (1)
- Lecture 1: Introduction To ARM Based Embedded SystemsDokument24 SeitenLecture 1: Introduction To ARM Based Embedded SystemsSaurabh HedaNoch keine Bewertungen
- Utilization of Electric PowerDokument1 SeiteUtilization of Electric PowerAbhimita GaineNoch keine Bewertungen
- Power DiodesDokument46 SeitenPower DiodesJay R BallonNoch keine Bewertungen
- CMOS Analog Design Using All-Region MOSFET Modeling: Advanced MOS Transistor ModelingDokument101 SeitenCMOS Analog Design Using All-Region MOSFET Modeling: Advanced MOS Transistor ModelingashishmanyanNoch keine Bewertungen
- Full State Feedback ControlDokument8 SeitenFull State Feedback ControlGabriel RodriguesNoch keine Bewertungen
- Spatial Filtering TechniquesDokument36 SeitenSpatial Filtering TechniquesK.R.RaguramNoch keine Bewertungen
- Two Stage Opamp BerkeleyDokument25 SeitenTwo Stage Opamp BerkeleyCircuit CruzNoch keine Bewertungen
- Analog Signal ConditioningDokument115 SeitenAnalog Signal ConditioningAmmad Ilyas100% (1)
- Proteus VSMDokument2 SeitenProteus VSMbouje72Noch keine Bewertungen
- chp7 3 Economic Dispatch PDFDokument11 Seitenchp7 3 Economic Dispatch PDFdo3llah100% (1)
- PC Controlled RobotDokument51 SeitenPC Controlled RobotmahammadvasimkNoch keine Bewertungen
- Control ReportDokument15 SeitenControl ReportKenshow Large50% (2)
- Chapter 15Dokument10 SeitenChapter 15Yug VarshneyNoch keine Bewertungen
- Microcontroller Systems (KON 309E) : Lecture Notes (WEEK 1)Dokument8 SeitenMicrocontroller Systems (KON 309E) : Lecture Notes (WEEK 1)Dursun DurmasınNoch keine Bewertungen
- CapacitorsDokument4 SeitenCapacitorsJohn David YermoNoch keine Bewertungen
- Embedded Systems For Satellite Comm - Keynote SpeechDokument12 SeitenEmbedded Systems For Satellite Comm - Keynote SpeechMuhammad Faisal ArainNoch keine Bewertungen
- 8051 InterruptDokument21 Seiten8051 InterruptarunvittoNoch keine Bewertungen
- Power System Simulation Lab ManualDokument41 SeitenPower System Simulation Lab ManualgokulchandruNoch keine Bewertungen
- Bode Plot ExamplesDokument3 SeitenBode Plot ExamplesZaidoon MohsinNoch keine Bewertungen
- Mosfet Notes 1Dokument9 SeitenMosfet Notes 1Anil SaiNoch keine Bewertungen
- Unit-4-1 PPT CSDokument78 SeitenUnit-4-1 PPT CS20R25A0420 KONDAMUDI VAMSI ANURAGNoch keine Bewertungen
- Ec1406 Control Systems Engineering 2023-2024Dokument38 SeitenEc1406 Control Systems Engineering 2023-2024saravanan.9344308178Noch keine Bewertungen
- Quiz 2 KeyDokument2 SeitenQuiz 2 KeyjaganathapandianNoch keine Bewertungen
- Polar PlotDokument13 SeitenPolar PlotjaganathapandianNoch keine Bewertungen
- Smith McMillan FormsDokument10 SeitenSmith McMillan FormsjaganathapandianNoch keine Bewertungen
- Kalman's TestDokument10 SeitenKalman's TestjaganathapandianNoch keine Bewertungen
- Control System Lab ManualDokument62 SeitenControl System Lab ManualVenkata Subramanian0% (1)
- Control System Design AstromDokument42 SeitenControl System Design AstromademargcjuniorNoch keine Bewertungen
- Advanced Control: Modeling Problem by Using MATLABDokument29 SeitenAdvanced Control: Modeling Problem by Using MATLABwillys8Noch keine Bewertungen
- Matlab Exercises For Introductory Control Theory: Jenő Hetthéssy Ruth Bars András BartaDokument60 SeitenMatlab Exercises For Introductory Control Theory: Jenő Hetthéssy Ruth Bars András BartaHélio Oliveira FerrariNoch keine Bewertungen
- Improved Modal Truncation Approximant: A Hybrid ApproachDokument8 SeitenImproved Modal Truncation Approximant: A Hybrid Approachrobert brownNoch keine Bewertungen
- Control System (PT)Dokument7 SeitenControl System (PT)MATHANKUMAR.SNoch keine Bewertungen
- All cs1 - 1Dokument191 SeitenAll cs1 - 1shaikh wajed khalilNoch keine Bewertungen
- Design FrequencyDokument5 SeitenDesign FrequencyGustavo SánchezNoch keine Bewertungen
- Me010 605 Mechatronics and Control SystemsDokument3 SeitenMe010 605 Mechatronics and Control SystemsSreehari VpNoch keine Bewertungen
- 9 Basic Characteristics of Lead, Lag and Lag-Lead CompensationDokument9 Seiten9 Basic Characteristics of Lead, Lag and Lag-Lead Compensationvidya_sagar826Noch keine Bewertungen
- Updated EE SyllabusDokument50 SeitenUpdated EE SyllabusHimanshu JainNoch keine Bewertungen
- Electronics Engg.: Detailed Solutions ofDokument52 SeitenElectronics Engg.: Detailed Solutions ofAshish ChoudharyNoch keine Bewertungen
- Full Download Book Linear Feedback Controls The Essentials PDFDokument41 SeitenFull Download Book Linear Feedback Controls The Essentials PDFheather.hermosillo571100% (15)
- Extra Quiz CT2-1Dokument3 SeitenExtra Quiz CT2-1Punitha ShanmugamNoch keine Bewertungen
- c10 Solutions-V0Dokument127 Seitenc10 Solutions-V0Ansel DingNoch keine Bewertungen
- Matlab For Electric CircuitsDokument12 SeitenMatlab For Electric CircuitsIftikhar KhanNoch keine Bewertungen
- SPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDFDokument7 SeitenSPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDF张明Noch keine Bewertungen
- AMME3500/9501 System Dynamics and Control Problem Set 11Dokument3 SeitenAMME3500/9501 System Dynamics and Control Problem Set 11Quazar001Noch keine Bewertungen
- Ec6405 IV SemDokument10 SeitenEc6405 IV SemKaruppu SamyNoch keine Bewertungen
- Introduction To Multisim Schematic Capture and Spice SimulationDokument96 SeitenIntroduction To Multisim Schematic Capture and Spice SimulationAbhishek yadavNoch keine Bewertungen
- Intro To Control TheoryDokument15 SeitenIntro To Control TheoryDavid AmarteyNoch keine Bewertungen
- ControlSystemsLabManual v0.6Dokument62 SeitenControlSystemsLabManual v0.6DikshaNoch keine Bewertungen
- Frequency Response For Control System Analysis - GATE Study Material in PDFDokument8 SeitenFrequency Response For Control System Analysis - GATE Study Material in PDFnidhi tripathiNoch keine Bewertungen
- Control Systems: GATE Objective & Numerical Type SolutionsDokument9 SeitenControl Systems: GATE Objective & Numerical Type SolutionsAakash DewanganNoch keine Bewertungen
- Current Mode Buck ConverterDokument37 SeitenCurrent Mode Buck ConverterGenetic JohnNoch keine Bewertungen
- nYQUIST PLOT PDFDokument28 SeitennYQUIST PLOT PDFTumenbayar LkhagvatserenNoch keine Bewertungen
- Dec. EC409-C - Ktu QbankDokument3 SeitenDec. EC409-C - Ktu QbankNISHANT KUMARNoch keine Bewertungen
- Syllabus ELG3155 - 20181Dokument4 SeitenSyllabus ELG3155 - 20181Mohamed HussainNoch keine Bewertungen