Das könnte Ihnen auch gefallen
- Computer Sciences Department Bahria University (Karachi Campus)Dokument22 SeitenComputer Sciences Department Bahria University (Karachi Campus)AbdullahNoch keine Bewertungen
- Quicksort: Introduction To AlgorithmsDokument36 SeitenQuicksort: Introduction To AlgorithmsGas dela RosaNoch keine Bewertungen
- Divide and Conquer (Quicksort) : CSE373: Design and Analysis of AlgorithmsDokument16 SeitenDivide and Conquer (Quicksort) : CSE373: Design and Analysis of AlgorithmsAdrian Anam SifaatNoch keine Bewertungen
- 5743-Divide and ConquerDokument26 Seiten5743-Divide and ConquerCricTalkNoch keine Bewertungen
- Quick SortDokument29 SeitenQuick SortAVIRAL PANDEYNoch keine Bewertungen
- 2il50 Data Structures: 2018-19 Q3 Lecture 5: Quicksort & SelectionDokument37 Seiten2il50 Data Structures: 2018-19 Q3 Lecture 5: Quicksort & SelectionJhonNoch keine Bewertungen
- Csce411 Random3Dokument25 SeitenCsce411 Random3the.ayushomNoch keine Bewertungen
- Quicksort: Revision of September 5, 2017Dokument19 SeitenQuicksort: Revision of September 5, 2017Long NguyễnNoch keine Bewertungen
- Sorting Algorithms: QuicksortDokument16 SeitenSorting Algorithms: QuicksortSHUBHAM JINDALNoch keine Bewertungen
- Quicksort AlgorithmDokument16 SeitenQuicksort AlgorithmHenny StogsNoch keine Bewertungen
- 4-Quick SortDokument36 Seiten4-Quick Sortrajnikant pubgNoch keine Bewertungen
- LEC6 06 خوارزميات أ زاهر مترجمة للطبعDokument15 SeitenLEC6 06 خوارزميات أ زاهر مترجمة للطبعhashim alshrfiNoch keine Bewertungen
- Heap SortDokument5 SeitenHeap Sortgastone dereckNoch keine Bewertungen
- Chapter 7: Quicksort: DivideDokument18 SeitenChapter 7: Quicksort: DivideShaunak PatelNoch keine Bewertungen
- Design and Analysis of Algorithms - Lab 1: Divide-And-Conquer Approach Using Quick SortDokument6 SeitenDesign and Analysis of Algorithms - Lab 1: Divide-And-Conquer Approach Using Quick SortNitin VaryaniNoch keine Bewertungen
- 3 Merge SortDokument15 Seiten3 Merge SortMIKIYAS TAMIRATNoch keine Bewertungen
- DAA SolutionsDokument7 SeitenDAA SolutionsMichael LarsonNoch keine Bewertungen
- Lecture04 v02Dokument29 SeitenLecture04 v02Mykhailo ShubinNoch keine Bewertungen
- Merge Sort Quick SortDokument43 SeitenMerge Sort Quick SortTudor TilinschiNoch keine Bewertungen
- Thomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, Cliffo - Solutions To Introduction To Algorithms - Libgen - LiDokument530 SeitenThomas H. Cormen, Charles E. Leiserson, Ronald L. Rivest, Cliffo - Solutions To Introduction To Algorithms - Libgen - LiYusuf CetinkayaNoch keine Bewertungen
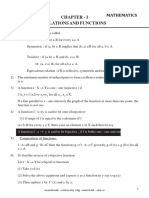
- Mathematics Full PDFDokument62 SeitenMathematics Full PDFPrakhar KumarNoch keine Bewertungen
- Designe and Analysis of Algoritham Mid-Term Equivalent AssignmentDokument9 SeitenDesigne and Analysis of Algoritham Mid-Term Equivalent Assignmentwarda KhanNoch keine Bewertungen
- Sheet 1 With AnswersDokument8 SeitenSheet 1 With AnswersHager ElzayatNoch keine Bewertungen
- Ds 9queues and RecursionQuickSortDokument13 SeitenDs 9queues and RecursionQuickSortnullaNoch keine Bewertungen
- On Iteration Digraph and Zero-Divisor Graph of The Ring NDokument18 SeitenOn Iteration Digraph and Zero-Divisor Graph of The Ring NRaulNoch keine Bewertungen
- Quicksort: Quicksort: Advantages and Disadvantages QuicksortDokument15 SeitenQuicksort: Quicksort: Advantages and Disadvantages QuicksortMohammed HajjajNoch keine Bewertungen
- Lec 07 QuicksortDokument15 SeitenLec 07 Quicksortcoco finaNoch keine Bewertungen
- CSE 5311 Homework 2 Solution: Problem 6.2-6Dokument8 SeitenCSE 5311 Homework 2 Solution: Problem 6.2-6Soe SandarNoch keine Bewertungen
- ArtiSubMath v10Dokument21 SeitenArtiSubMath v10Julius HouNoch keine Bewertungen
- Implementing The Weil, Tate and Ate Pairings Using Sage SoftwareDokument19 SeitenImplementing The Weil, Tate and Ate Pairings Using Sage SoftwareMuhammad SadnoNoch keine Bewertungen
- 17-Correctness of Iterative AlgorithmsDokument23 Seiten17-Correctness of Iterative AlgorithmskevinkarkafiNoch keine Bewertungen
- A Linear-Time Algorithm For Concave One-Dimensional Dynamic ProgrammingDokument5 SeitenA Linear-Time Algorithm For Concave One-Dimensional Dynamic ProgrammingBui Quoc TrungNoch keine Bewertungen
- Be Quick To Sort Your Problem OutDokument11 SeitenBe Quick To Sort Your Problem Outbengali SenNoch keine Bewertungen
- Problemset 3 SolDokument5 SeitenProblemset 3 SolGobara DhanNoch keine Bewertungen
- Fast Scalar Multiplication On Elliptic Curves - Tanja LangeDokument48 SeitenFast Scalar Multiplication On Elliptic Curves - Tanja LangenfwuNoch keine Bewertungen
- Ch2 Ch3 Ch4 Ch5 MergedDokument50 SeitenCh2 Ch3 Ch4 Ch5 Mergedberserker2236Noch keine Bewertungen
- Michelle Bodnar, Andrew Lohr January 3, 2018Dokument12 SeitenMichelle Bodnar, Andrew Lohr January 3, 2018ankit pandeyNoch keine Bewertungen
- 07 QuicksortDokument9 Seiten07 Quicksortislamemad079Noch keine Bewertungen
- L-Functions, Problem Sheet 4Dokument3 SeitenL-Functions, Problem Sheet 4sticker592Noch keine Bewertungen
- LAL Lecture NotesDokument73 SeitenLAL Lecture NotesAnushka VijayNoch keine Bewertungen
- Homework 1 Solutions: Input OutputDokument4 SeitenHomework 1 Solutions: Input OutputSyed Shafqat IrfanNoch keine Bewertungen
- DSAL-211-Lecture 6 - Sorting AlgorithmsDokument27 SeitenDSAL-211-Lecture 6 - Sorting AlgorithmsKutemwa MithiNoch keine Bewertungen
- Discussion Section of 1/23/13: 1.1 Expected Value and VarianceDokument7 SeitenDiscussion Section of 1/23/13: 1.1 Expected Value and VarianceVishak MuthukumarNoch keine Bewertungen
- Merge Sort AdaDokument6 SeitenMerge Sort AdaridamNoch keine Bewertungen
- Test-7-EE - Signals & Systems PDFDokument18 SeitenTest-7-EE - Signals & Systems PDFchiranji lal bairwaNoch keine Bewertungen
- Riemann Stieltjes IntegralDokument14 SeitenRiemann Stieltjes Integralİbrahim Ekrem BardakçıNoch keine Bewertungen
- Matrix InversionDokument4 SeitenMatrix InversionPutra Indra AndikaNoch keine Bewertungen
- DandcDokument46 SeitenDandcNhi NhiNoch keine Bewertungen
- Dynamic Programming Solution To The Matrix-Chain Multiplication ProblemDokument4 SeitenDynamic Programming Solution To The Matrix-Chain Multiplication ProblemHARSHRAJSINH SOLANKINoch keine Bewertungen
- Chapter 4 Differintegration of Simple F - 1974 - Mathematics in Science and EngDokument8 SeitenChapter 4 Differintegration of Simple F - 1974 - Mathematics in Science and EngFelipe Augusto Paes de GodoiNoch keine Bewertungen
- HWDokument41 SeitenHWjhdmssNoch keine Bewertungen
- HocsDokument5 SeitenHocsyygorakindyyNoch keine Bewertungen
- LectureNotes0U MergedDokument97 SeitenLectureNotes0U MergedfophirfNoch keine Bewertungen
- Michelle Bodnar, Andrew Lohr September 17, 2017Dokument12 SeitenMichelle Bodnar, Andrew Lohr September 17, 2017Mm AANoch keine Bewertungen
- Advanced Data StructuresDokument597 SeitenAdvanced Data Structuresluciferbaba962Noch keine Bewertungen
- Lec06 570Dokument5 SeitenLec06 570Mukul BhallaNoch keine Bewertungen
- 小考20181026 (第一次期中考)Dokument8 Seiten小考20181026 (第一次期中考)940984326Noch keine Bewertungen
- SolutionManual August29Dokument36 SeitenSolutionManual August29kwontae97Noch keine Bewertungen
- Commensurabilities among Lattices in PU (1,n). (AM-132), Volume 132Von EverandCommensurabilities among Lattices in PU (1,n). (AM-132), Volume 132Noch keine Bewertungen
- P, NP, NP Hard, NP CompleteDokument41 SeitenP, NP, NP Hard, NP CompleteEnmuskNoch keine Bewertungen
- Graph-Based Algorithms: CSE373: Design and Analysis of AlgorithmsDokument6 SeitenGraph-Based Algorithms: CSE373: Design and Analysis of AlgorithmsEnmuskNoch keine Bewertungen
- L13 Graph Part02Dokument41 SeitenL13 Graph Part02EnmuskNoch keine Bewertungen
- L15 Graph Part04Dokument52 SeitenL15 Graph Part04EnmuskNoch keine Bewertungen
- L11 DynamicProgramming - Part05Dokument31 SeitenL11 DynamicProgramming - Part05EnmuskNoch keine Bewertungen
- L16 Graph Part05Dokument32 SeitenL16 Graph Part05EnmuskNoch keine Bewertungen
- L14 Graph Part03Dokument20 SeitenL14 Graph Part03EnmuskNoch keine Bewertungen
- L08 DynamicProgramming - Part02Dokument11 SeitenL08 DynamicProgramming - Part02EnmuskNoch keine Bewertungen
- L01 AlgoAnalysisDokument52 SeitenL01 AlgoAnalysisEnmuskNoch keine Bewertungen
- L07 DynamicProgramming - Part01Dokument21 SeitenL07 DynamicProgramming - Part01EnmuskNoch keine Bewertungen
- L10 DynamicProgramming - Part04Dokument94 SeitenL10 DynamicProgramming - Part04EnmuskNoch keine Bewertungen
- L09 DynamicProgramming - Part03Dokument14 SeitenL09 DynamicProgramming - Part03EnmuskNoch keine Bewertungen
- L06 Greedy Part02Dokument15 SeitenL06 Greedy Part02EnmuskNoch keine Bewertungen
- L04 DivideConquer - Part03Dokument68 SeitenL04 DivideConquer - Part03EnmuskNoch keine Bewertungen
- Assignment 5capacitorDokument1 SeiteAssignment 5capacitorEnmuskNoch keine Bewertungen
- Lec 1,2,3 RMDokument28 SeitenLec 1,2,3 RMEnmuskNoch keine Bewertungen
- 373 Assignment 1Dokument2 Seiten373 Assignment 1EnmuskNoch keine Bewertungen
- L05 Greedy Part01Dokument30 SeitenL05 Greedy Part01EnmuskNoch keine Bewertungen
- Lec 16 DigestionDokument45 SeitenLec 16 DigestionEnmuskNoch keine Bewertungen
- Lec 15 HomeostasisDokument23 SeitenLec 15 HomeostasisEnmuskNoch keine Bewertungen
- List of VitaminsDokument2 SeitenList of VitaminsEnmuskNoch keine Bewertungen
- Lec 17 Circulatory SystemDokument21 SeitenLec 17 Circulatory SystemEnmuskNoch keine Bewertungen
- Lec 18 Respiratory, Excretory SystemDokument19 SeitenLec 18 Respiratory, Excretory SystemEnmuskNoch keine Bewertungen
- Lec 1,2 Intro To Biology and LifeDokument32 SeitenLec 1,2 Intro To Biology and LifeEnmuskNoch keine Bewertungen
- Lec 19 Diabetes, Lipid ProfileDokument23 SeitenLec 19 Diabetes, Lipid ProfileEnmuskNoch keine Bewertungen
- Lec 3 Classification of Living ThingsDokument19 SeitenLec 3 Classification of Living ThingsEnmuskNoch keine Bewertungen
- Lec 4,5 Chemistry of LifeDokument34 SeitenLec 4,5 Chemistry of LifeEnmuskNoch keine Bewertungen
- Lec 1,2,3 RM PDFDokument17 SeitenLec 1,2,3 RM PDFEnmuskNoch keine Bewertungen
- Unit 5 SearchingSortingHashing PDFDokument53 SeitenUnit 5 SearchingSortingHashing PDFAnonymous ab2R0jK0aNoch keine Bewertungen
- SetsDokument3 SeitenSetsDaenerysNoch keine Bewertungen
- Sorting Algorithms Cheat Sheet: by ViaDokument2 SeitenSorting Algorithms Cheat Sheet: by ViashekharNoch keine Bewertungen
- 1 KeyDokument6 Seiten1 KeyAarti SoniNoch keine Bewertungen
- LatticeDokument24 SeitenLatticeC NinjasNoch keine Bewertungen
- Selection SortDokument36 SeitenSelection Sortsadhana mmNoch keine Bewertungen
- Analisis Perbandingan Kompleksitas Algoritma Pengurutan Nilai (Sorting)Dokument12 SeitenAnalisis Perbandingan Kompleksitas Algoritma Pengurutan Nilai (Sorting)BSI PurwokertoNoch keine Bewertungen
- Boolean Algebra (Structure)Dokument8 SeitenBoolean Algebra (Structure)geromNoch keine Bewertungen
- Monotonicity GB Sir ModuleDokument10 SeitenMonotonicity GB Sir ModuleDevesh TripathiNoch keine Bewertungen
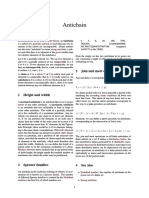
- Antichain: 3 Join and Meet OperationsDokument3 SeitenAntichain: 3 Join and Meet OperationsmarsNoch keine Bewertungen
- Big-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowellDokument9 SeitenBig-O Algorithm Complexity Cheat Sheet (Know Thy Complexities!) @ericdrowelllaureNoch keine Bewertungen
- Tutorial 1.2Dokument9 SeitenTutorial 1.2Samridh GuptaNoch keine Bewertungen
- VL2020210101273 DaDokument1 SeiteVL2020210101273 DaDivyesh YadavNoch keine Bewertungen
- Heap AlgorithmDokument6 SeitenHeap AlgorithmMaysam AlkeramNoch keine Bewertungen
- Sorting in CDokument18 SeitenSorting in CAnand DuraiswamyNoch keine Bewertungen
- Assignment 21: Sorting of An Unsorted Array by Using Merge SortDokument7 SeitenAssignment 21: Sorting of An Unsorted Array by Using Merge SortLn Amitav BiswasNoch keine Bewertungen
- Lab 09Dokument13 SeitenLab 09Waqas AliNoch keine Bewertungen
- Heap Sort: Input: One-Dimension Array Advantages of Insertion Sort and Merge Sort Heap SortDokument26 SeitenHeap Sort: Input: One-Dimension Array Advantages of Insertion Sort and Merge Sort Heap SortMohammed HajjajNoch keine Bewertungen
- Insertion SortDokument60 SeitenInsertion SortLamia AlamNoch keine Bewertungen
- Radix SortDokument58 SeitenRadix SortKrisha DavdaNoch keine Bewertungen
- Quick Sort and Selection SortDokument8 SeitenQuick Sort and Selection SortAbirami SundaravelNoch keine Bewertungen
- DS FileDokument27 SeitenDS FileJatinNoch keine Bewertungen
- Implementation of Selection Sort and Insertion Sort AlgorithmDokument10 SeitenImplementation of Selection Sort and Insertion Sort AlgorithmSyaravina MeilitaNoch keine Bewertungen
- Sorting AlgorithmsDokument14 SeitenSorting AlgorithmsPhotal Khan Wafa AbbasNoch keine Bewertungen
- CCC121-07-Sorting AlgorithmsDokument15 SeitenCCC121-07-Sorting AlgorithmsJoshua MadulaNoch keine Bewertungen
- Insertion SortDokument16 SeitenInsertion SortSandra JacobNoch keine Bewertungen
- DSA With Java - Unit 8Dokument32 SeitenDSA With Java - Unit 8Sabin MaharjanNoch keine Bewertungen
- Zeyad Adnan AbbasDokument40 SeitenZeyad Adnan AbbasZubair AhmadNoch keine Bewertungen
- Introduction To Formal Concept Analysis and ItsDokument102 SeitenIntroduction To Formal Concept Analysis and ItsNicu Toderici100% (1)
- YyyyyyyyyDokument47 SeitenYyyyyyyyyabi sathwikNoch keine Bewertungen