Das könnte Ihnen auch gefallen
- Modeling of Sigma Delta Modulator Non Idealities With Two Step Quantization in MATLAB SIMULINK PDFDokument6 SeitenModeling of Sigma Delta Modulator Non Idealities With Two Step Quantization in MATLAB SIMULINK PDFeditor_ijcatNoch keine Bewertungen
- Calibration Techniques in Adcs: Ahmed M. A. Ali Analog Devices, IncDokument74 SeitenCalibration Techniques in Adcs: Ahmed M. A. Ali Analog Devices, IncdxzhangNoch keine Bewertungen
- Isscc2022 000002CLDokument16 SeitenIsscc2022 000002CLdashuai huaNoch keine Bewertungen
- Ece IV Signals & Systems (10ec44) NotesDokument115 SeitenEce IV Signals & Systems (10ec44) NotesDevendra Kumar RNoch keine Bewertungen
- Solutions To Module 5 (New)Dokument6 SeitenSolutions To Module 5 (New)HARSHAN GOWDA K H100% (1)
- DSPAA Jan 2019 QP SolutionDokument34 SeitenDSPAA Jan 2019 QP SolutionAbhishek SinghNoch keine Bewertungen
- Disruptive DevelopmentsDokument24 SeitenDisruptive DevelopmentsaetherdexNoch keine Bewertungen
- Representing Multimedia Information DigitallyDokument30 SeitenRepresenting Multimedia Information DigitallyNeil LewisNoch keine Bewertungen
- Lecture23 dr3Dokument37 SeitenLecture23 dr3api-3834272Noch keine Bewertungen
- Part - A (5x 2 10 MARKS) Answer All Questions: Academic Year 2020-21 ODD OML751 Testing of MaterialsDokument1 SeitePart - A (5x 2 10 MARKS) Answer All Questions: Academic Year 2020-21 ODD OML751 Testing of Materialsjamunaa83Noch keine Bewertungen
- Design Logic ProgramableDokument126 SeitenDesign Logic ProgramableMinh PhạmNoch keine Bewertungen
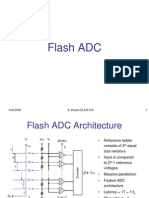
- Flash ADCDokument22 SeitenFlash ADCmahpa313Noch keine Bewertungen
- NXP Antenna DesignDokument48 SeitenNXP Antenna DesignUsama ButtNoch keine Bewertungen
- Automatic Tool Changer - WikipediaDokument5 SeitenAutomatic Tool Changer - WikipediaChethan HalkurNoch keine Bewertungen
- Crypto NotesDokument89 SeitenCrypto NotesLatha MurugappanNoch keine Bewertungen
- 08 VHDL IntroductionDokument35 Seiten08 VHDL IntroductionOmnipotent yayNoch keine Bewertungen
- Problem 13.3Dokument2 SeitenProblem 13.3kannyNoch keine Bewertungen
- Unit 4 - Week 1 - Introduction, Sampling and Reconstruction: Assignment 1Dokument6 SeitenUnit 4 - Week 1 - Introduction, Sampling and Reconstruction: Assignment 1Akshay Kumar100% (1)
- A 1-V 1-GSs 6-Bit Low-Power Flash ADC in 90nm CMOSDokument4 SeitenA 1-V 1-GSs 6-Bit Low-Power Flash ADC in 90nm CMOSThanos van RamNoch keine Bewertungen
- Sedra8e Solvedproblems ch09-2 PDFDokument24 SeitenSedra8e Solvedproblems ch09-2 PDFJoh CheNoch keine Bewertungen
- Digital Signal Processors and Architectures (DSPA) Unit-2Dokument92 SeitenDigital Signal Processors and Architectures (DSPA) Unit-2Chaitanya DuggineniNoch keine Bewertungen
- Machine LearningDokument7 SeitenMachine LearningAbinaya87Noch keine Bewertungen
- Broadcom QuestionsDokument2 SeitenBroadcom QuestionsK Nagarjunan Reddy100% (1)
- A CMOS Bandgap Reference Circuit With Sub-1V OperationDokument5 SeitenA CMOS Bandgap Reference Circuit With Sub-1V Operationbooky_mookyNoch keine Bewertungen
- High Speed Vlsi DesignDokument93 SeitenHigh Speed Vlsi DesignDr Narayana Swamy RamaiahNoch keine Bewertungen
- Folding ADC TutorialDokument5 SeitenFolding ADC TutorialAlexandre KennedyNoch keine Bewertungen
- FFT ApplicationDokument22 SeitenFFT ApplicationShahrukh MushtaqNoch keine Bewertungen
- Design of 12-Bit DAC Using CMOS TechnologyDokument5 SeitenDesign of 12-Bit DAC Using CMOS TechnologysanthoshNoch keine Bewertungen
- Pipelined AdcDokument14 SeitenPipelined AdcHubert Ekow AttahNoch keine Bewertungen
- Systemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammDokument26 SeitenSystemc-Ams Tutorial: Institute of Computer Technology Vienna University of Technology Markus DammAamir HabibNoch keine Bewertungen
- UART Vs I2C Vs SPIDokument49 SeitenUART Vs I2C Vs SPIKishore KishuNoch keine Bewertungen
- AWR Nonlinear Modeling White PaperDokument6 SeitenAWR Nonlinear Modeling White PaperAWR CorporationNoch keine Bewertungen
- Notes On DOS and Carrier DensitiesDokument16 SeitenNotes On DOS and Carrier DensitiesHadiaFatimaNoch keine Bewertungen
- ES PaperDokument22 SeitenES PaperRaghu Nath SinghNoch keine Bewertungen
- ADPLL Design and Implementation On FPGADokument6 SeitenADPLL Design and Implementation On FPGANavathej BangariNoch keine Bewertungen
- Digital Phased Arrays ChallangesDokument17 SeitenDigital Phased Arrays ChallangesVivek KadamNoch keine Bewertungen
- Unit 3 Programmable Digital Signal ProcessorsDokument25 SeitenUnit 3 Programmable Digital Signal ProcessorsPreetham SaigalNoch keine Bewertungen
- 1.8-V Low Power, High-Resolution, High-Speed Comparator With Low Offset Voltage Implemented in 45nm CMOS TechnologyDokument5 Seiten1.8-V Low Power, High-Resolution, High-Speed Comparator With Low Offset Voltage Implemented in 45nm CMOS TechnologyInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- BER Analysis of DSSS-CDMA Using MATLABDokument7 SeitenBER Analysis of DSSS-CDMA Using MATLABAnonymous lPvvgiQjRNoch keine Bewertungen
- Lecture21 dr1Dokument31 SeitenLecture21 dr1api-3834272Noch keine Bewertungen
- Performance of 8-Psk Modulation Scheme Using Rayleigh Fading Channel For Wcdma SystemDokument7 SeitenPerformance of 8-Psk Modulation Scheme Using Rayleigh Fading Channel For Wcdma SystemANIKNoch keine Bewertungen
- Short Channel EffectsDokument27 SeitenShort Channel Effectsilg10% (1)
- Ec8093-Digital Image Processing: Dr.K.Kalaivani Associate Professor Dept. of EIE Easwari Engineering CollegeDokument41 SeitenEc8093-Digital Image Processing: Dr.K.Kalaivani Associate Professor Dept. of EIE Easwari Engineering CollegeKALAIVANINoch keine Bewertungen
- Complex Signal ProcessingDokument12 SeitenComplex Signal ProcessingDavid TynanNoch keine Bewertungen
- Two Stage Opamp DesignDokument18 SeitenTwo Stage Opamp DesignHajime100% (1)
- ComparatorDokument42 SeitenComparatoramta1Noch keine Bewertungen
- VLSI FDP Brochure - Phase3Dokument2 SeitenVLSI FDP Brochure - Phase3Panku RangareeNoch keine Bewertungen
- Design of Analog FIltersDokument7 SeitenDesign of Analog FIltersparshuram kumarNoch keine Bewertungen
- MMIC Processing Techniques and Design ConsiderationsDokument23 SeitenMMIC Processing Techniques and Design ConsiderationsVishal IyerNoch keine Bewertungen
- Low Power VLSI DesignDokument20 SeitenLow Power VLSI DesignansuharshNoch keine Bewertungen
- Fading Techniques in Wireless Communication and Their Appropriate Solution A ReviewDokument6 SeitenFading Techniques in Wireless Communication and Their Appropriate Solution A ReviewEditor IJTSRDNoch keine Bewertungen
- ISSCC 2020 Device Design Considerations for FinFET CircuitsDokument80 SeitenISSCC 2020 Device Design Considerations for FinFET CircuitsanonNoch keine Bewertungen
- A 1.2 v 285μA Analog Front End Chip for a Digital Hearing Aid in 0.13 Μm CMOSDokument4 SeitenA 1.2 v 285μA Analog Front End Chip for a Digital Hearing Aid in 0.13 Μm CMOSWu JenshiNoch keine Bewertungen
- Two-Stage Operational Amplifier Design Using Gm/Id MethodDokument7 SeitenTwo-Stage Operational Amplifier Design Using Gm/Id Methodabhinav kumarNoch keine Bewertungen
- Design and Analysis of 2.4 GHZ Low-Noise, High-Gain 0.18 M Cmos Cascode Low-Noise Amplifier For Irnss ApplicationsDokument12 SeitenDesign and Analysis of 2.4 GHZ Low-Noise, High-Gain 0.18 M Cmos Cascode Low-Noise Amplifier For Irnss ApplicationsRami Reddy100% (1)
- Lecture1 IntroDokument35 SeitenLecture1 Introapi-3834272Noch keine Bewertungen
- Introduction to DSP Processors: Modified Bus Structures and Memory AccessDokument26 SeitenIntroduction to DSP Processors: Modified Bus Structures and Memory AccessVaishnavi. KoyaNoch keine Bewertungen
- Interfacing RS-232 With Spartan-3E FPGADokument11 SeitenInterfacing RS-232 With Spartan-3E FPGAprasad357Noch keine Bewertungen
- Ring Amplifiers For Switched Capacitor CircuitsDokument15 SeitenRing Amplifiers For Switched Capacitor CircuitsheqiNoch keine Bewertungen
- Convert Phase Noise To JitterDokument10 SeitenConvert Phase Noise To JitterBo LuNoch keine Bewertungen
- Convert Phase Noise To JitterDokument10 SeitenConvert Phase Noise To JitterBo LuNoch keine Bewertungen
- High-Speed Input Clock Issues PDFDokument21 SeitenHigh-Speed Input Clock Issues PDFheqiNoch keine Bewertungen
- LM94021, LM94022: Temperature Sensor Solutions For Low-Voltage SystemsDokument6 SeitenLM94021, LM94022: Temperature Sensor Solutions For Low-Voltage SystemsAmbition UcNoch keine Bewertungen
- AAS 6300 Service ManualDokument76 SeitenAAS 6300 Service Manualfuadye100% (1)
- Pneumatic Positioning Device Coupled With Piezoelectric Self-Moving MechanismDokument9 SeitenPneumatic Positioning Device Coupled With Piezoelectric Self-Moving Mechanismno nameejjNoch keine Bewertungen
- 2019 VLSI Fully Integrated Coherent LiDAR in 3D-Integrated Silicon Photonics65nm CMOS PDFDokument2 Seiten2019 VLSI Fully Integrated Coherent LiDAR in 3D-Integrated Silicon Photonics65nm CMOS PDFnxp HeNoch keine Bewertungen
- XJ Products Brochures enDokument64 SeitenXJ Products Brochures enMika Kadju RapalangiNoch keine Bewertungen
- Digital Radiography An Introduction For Technologists 1st Edition Seeram Test BankDokument8 SeitenDigital Radiography An Introduction For Technologists 1st Edition Seeram Test BankCrystalBrowncpzky100% (17)
- Atmel AVR Microcontroller Primer - Programming and InterfaciDokument194 SeitenAtmel AVR Microcontroller Primer - Programming and InterfaciRiki Siregar RUliNoch keine Bewertungen
- Elc Md204 User ManualDokument65 SeitenElc Md204 User ManualAbraham del Hoyo SotoNoch keine Bewertungen
- Cdweb Control For Proflow: System ManualDokument169 SeitenCdweb Control For Proflow: System ManualOliver calderasNoch keine Bewertungen
- Gse 672 - 675Dokument430 SeitenGse 672 - 675Marcelo BerriosNoch keine Bewertungen
- TRIPLE 10-BIT, 90-MSPS, Video and Graphics Digitizer With Horizontal PLLDokument59 SeitenTRIPLE 10-BIT, 90-MSPS, Video and Graphics Digitizer With Horizontal PLL2527919Noch keine Bewertungen
- User's Guide: Analog and Digital I/ODokument20 SeitenUser's Guide: Analog and Digital I/OcticusorNoch keine Bewertungen
- Ad7606b 1623783Dokument73 SeitenAd7606b 1623783Jeferson AlvesNoch keine Bewertungen
- Chapter 5 PDFDokument41 SeitenChapter 5 PDFMuhamad AmmarNoch keine Bewertungen
- Emi Course FileDokument62 SeitenEmi Course FileDhinakar ReddyNoch keine Bewertungen
- Digital Communication Quantization OverviewDokument5 SeitenDigital Communication Quantization OverviewNiharika KorukondaNoch keine Bewertungen
- Supplier'S Technical Data Sheet On Control System: I GeneralDokument12 SeitenSupplier'S Technical Data Sheet On Control System: I GeneralStephen BridgesNoch keine Bewertungen
- Power Theft ReportDokument62 SeitenPower Theft ReportRamalingam Shanmugam0% (2)
- Bq76942 3-Series To 10-Series High Accuracy Battery Monitor and Protector For Li-Ion, Li - Polymer, and Lifepo Battery PacksDokument82 SeitenBq76942 3-Series To 10-Series High Accuracy Battery Monitor and Protector For Li-Ion, Li - Polymer, and Lifepo Battery PacksSohail ShahzadNoch keine Bewertungen
- MCU8 Quarterly Update CQ2'13Dokument227 SeitenMCU8 Quarterly Update CQ2'13Andres Bruno SaraviaNoch keine Bewertungen
- Protechtps: Product Change Notification 06947Dokument4 SeitenProtechtps: Product Change Notification 06947Amit ParmarNoch keine Bewertungen
- 1380047301wpdm Final Year University Project Report EEEDokument83 Seiten1380047301wpdm Final Year University Project Report EEEShanmugha Priya BalasubramanianNoch keine Bewertungen
- GDokument16 SeitenGproejamilNoch keine Bewertungen
- BQ28Z610-R1 Impedance Track™ Gas Gauge and Protection Solution For 1-Series To 2-Series Cell Li-Ion Battery PacksDokument37 SeitenBQ28Z610-R1 Impedance Track™ Gas Gauge and Protection Solution For 1-Series To 2-Series Cell Li-Ion Battery PacksTamNoch keine Bewertungen
- Spartan - 6 Project Card: User ManualDokument81 SeitenSpartan - 6 Project Card: User ManualunchalliNoch keine Bewertungen
- CPE 329 Final Project ReportDokument13 SeitenCPE 329 Final Project ReportChris PolisNoch keine Bewertungen
- Design of A New 3 Bit Flash Analog To DiDokument11 SeitenDesign of A New 3 Bit Flash Analog To DisayemeeceNoch keine Bewertungen
- Celdas de Carga PDFDokument8 SeitenCeldas de Carga PDFCarlos_Duque1958Noch keine Bewertungen
- AK96 Error Code 350Dokument132 SeitenAK96 Error Code 350Tyo67% (6)