Das könnte Ihnen auch gefallen
- Self Balance 2 Wheeler2Dokument17 SeitenSelf Balance 2 Wheeler2Sangam PatariNoch keine Bewertungen
- Design and Fabrication of Self Balancing Two-Wheeler Model Using GyroscopeDokument11 SeitenDesign and Fabrication of Self Balancing Two-Wheeler Model Using GyroscoperameshsmeNoch keine Bewertungen
- Self Balance 2 WheelerDokument16 SeitenSelf Balance 2 WheelerSangam PatariNoch keine Bewertungen
- A Review On Various Self Balanacing MethodsDokument4 SeitenA Review On Various Self Balanacing MethodsInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Project Report - Self Balancing Learning CycleDokument21 SeitenProject Report - Self Balancing Learning CycleAditya RaoNoch keine Bewertungen
- JETIR1906Y23Dokument5 SeitenJETIR1906Y23Team LegendsNoch keine Bewertungen
- Gyroscopic Stabilization of Unstable Vehicles ConfDokument15 SeitenGyroscopic Stabilization of Unstable Vehicles Confcrazy stuffsNoch keine Bewertungen
- HoverboardDokument5 SeitenHoverboardSuresh PrajapatiNoch keine Bewertungen
- Application of gyroscopic principle in automobilesDokument3 SeitenApplication of gyroscopic principle in automobilesANANDARAJ SNoch keine Bewertungen
- Gyroscopic Stabilization of Unstable VehiclesDokument19 SeitenGyroscopic Stabilization of Unstable VehiclesIrfanNoch keine Bewertungen
- Progress ReportDokument6 SeitenProgress ReportBablu KumarNoch keine Bewertungen
- Design, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Dokument15 SeitenDesign, Fabrication AND Analysis OF Rocker Bogie Mechanism: Mukt Shabd Journal ISSN NO: 2347-3150Tejas PrakashNoch keine Bewertungen
- SK RPTDokument4 SeitenSK RPTANANDARAJ SNoch keine Bewertungen
- Self Balancing of Two WheelerDokument4 SeitenSelf Balancing of Two WheelerInternational Journal of Innovative Science and Research TechnologyNoch keine Bewertungen
- Shri Ramswaroop Memorial University: SynopsisDokument8 SeitenShri Ramswaroop Memorial University: SynopsisAbhishek MukherjeeNoch keine Bewertungen
- Kugel Balance: Ballbots - The Future of Personal Transport?Dokument3 SeitenKugel Balance: Ballbots - The Future of Personal Transport?Daukan Chavez AlbercaNoch keine Bewertungen
- Fabrication of Self Balancing Two Wheeler Using Gysroscope.02Dokument20 SeitenFabrication of Self Balancing Two Wheeler Using Gysroscope.02milan mottaNoch keine Bewertungen
- Ciac2015 HJRDokument11 SeitenCiac2015 HJRChiha WissemNoch keine Bewertungen
- Ijmet 10 01 172-2Dokument14 SeitenIjmet 10 01 172-2Kanna MonishNoch keine Bewertungen
- IJARIIE Manuscript FromatDokument4 SeitenIJARIIE Manuscript FromatDhiwakkar Ganesan100% (1)
- An Approach For Design and Fabrication of Solared Powered Terrain Vehicle Under Rocker Bogie MechanismDokument8 SeitenAn Approach For Design and Fabrication of Solared Powered Terrain Vehicle Under Rocker Bogie MechanismIJRASETPublicationsNoch keine Bewertungen
- Ijmet 10 01 172 PDFDokument14 SeitenIjmet 10 01 172 PDFsobia aslamNoch keine Bewertungen
- Fabrication of Cross Trainer With BicycleDokument7 SeitenFabrication of Cross Trainer With BicycleIJRASETPublicationsNoch keine Bewertungen
- Automatic Balancing Robot: Madhuram.M (Assistant Professor)Dokument12 SeitenAutomatic Balancing Robot: Madhuram.M (Assistant Professor)رشيد بن صغيرNoch keine Bewertungen
- GyroscopeDokument5 SeitenGyroscopesande.norman21Noch keine Bewertungen
- Design and Fabrication of Four Wheel Steering System For Light Motor VehiclesDokument10 SeitenDesign and Fabrication of Four Wheel Steering System For Light Motor VehiclesS18M168 SUJAN BALAJI SNoch keine Bewertungen
- Gyroscopic Stabilization of Unstable Vehicles Project PresentationDokument25 SeitenGyroscopic Stabilization of Unstable Vehicles Project PresentationPratham JainNoch keine Bewertungen
- Research Paper On GyroscopeDokument5 SeitenResearch Paper On Gyroscopefvdddmxt100% (1)
- JETIR2009041Dokument7 SeitenJETIR2009041Glorius CarmenNoch keine Bewertungen
- 90 Degree Steering - ADA - J. SedyonoDokument9 Seiten90 Degree Steering - ADA - J. SedyonoJoko SedyonoNoch keine Bewertungen
- Conventional and Slip Steering For Multi-Wheel Planetary RoversDokument39 SeitenConventional and Slip Steering For Multi-Wheel Planetary RoversGreggs ShopukNoch keine Bewertungen
- Topology_Optimization_of_Motorcycle_SwinDokument5 SeitenTopology_Optimization_of_Motorcycle_SwinBhawesh SthaNoch keine Bewertungen
- Design and Analysis of An Epicyclic Gear Train Mechanism: Saroj Mohan Institute of TechnologyDokument20 SeitenDesign and Analysis of An Epicyclic Gear Train Mechanism: Saroj Mohan Institute of TechnologyMy ProNoch keine Bewertungen
- Project in MD Lab - 1Dokument8 SeitenProject in MD Lab - 1Art Angel GingoNoch keine Bewertungen
- Electric Unicycle (EUC)Dokument15 SeitenElectric Unicycle (EUC)HimanshuNoch keine Bewertungen
- Design Fabrication of Universal Driving Wheel With Forklift ApplicationDokument10 SeitenDesign Fabrication of Universal Driving Wheel With Forklift Applicationkifle abelNoch keine Bewertungen
- JETIR1906R84Dokument10 SeitenJETIR1906R84Vignesan MechNoch keine Bewertungen
- Design, Analysis and Optimization of Leaf SpringDokument9 SeitenDesign, Analysis and Optimization of Leaf SpringTeuku Andy0% (1)
- Ballari Institute of Technology & Management: Fabrication of Kinematic WalkerDokument21 SeitenBallari Institute of Technology & Management: Fabrication of Kinematic Walkerpavanchowdary PcNoch keine Bewertungen
- Syehan 2019 IOP Conf. Ser. Mater. Sci. Eng. 494 012088Dokument10 SeitenSyehan 2019 IOP Conf. Ser. Mater. Sci. Eng. 494 012088Mehul ChauhanNoch keine Bewertungen
- Chainless BicycleDokument8 SeitenChainless BicycleIJRASETPublicationsNoch keine Bewertungen
- Mechanically Operated Wheelchair Convertible StretcherDokument5 SeitenMechanically Operated Wheelchair Convertible StretcherIAEME PublicationNoch keine Bewertungen
- Modified Suspension of Motorcycle - A ReviewDokument4 SeitenModified Suspension of Motorcycle - A ReviewMULYADINoch keine Bewertungen
- Deng 2021 J. Phys. Conf. Ser. 1865 032002Dokument6 SeitenDeng 2021 J. Phys. Conf. Ser. 1865 032002Mohammed RawashdehNoch keine Bewertungen
- Design and Development of Automatic Center Stand For Two WheelerDokument9 SeitenDesign and Development of Automatic Center Stand For Two WheelerInternational Journal of Innovations in Engineering and ScienceNoch keine Bewertungen
- Craby Steering SystemDokument13 SeitenCraby Steering SystemIJRASETPublicationsNoch keine Bewertungen
- Control of A Stair Climbing Wheelchair: International Journal of Robotics and Automation (IJRA)Dokument11 SeitenControl of A Stair Climbing Wheelchair: International Journal of Robotics and Automation (IJRA)Prateek AggarwalNoch keine Bewertungen
- Modelling of Tilting and Steering Control System FDokument7 SeitenModelling of Tilting and Steering Control System FKhaled N ShmaitNoch keine Bewertungen
- Fin Irjmets1680685516Dokument3 SeitenFin Irjmets1680685516Shivam sinhaNoch keine Bewertungen
- Design of A Two-Stage Cycloidal Gear Reducer WithDokument14 SeitenDesign of A Two-Stage Cycloidal Gear Reducer WithAlejandro ChavezNoch keine Bewertungen
- Slip Based Skid Steered An An Lys IsDokument11 SeitenSlip Based Skid Steered An An Lys IsArun Kumar SinghNoch keine Bewertungen
- Design and Fabrication of Tilting Bike: Keywords: Tilting Mechanism, Slippage, Directional Stability, LeaningDokument5 SeitenDesign and Fabrication of Tilting Bike: Keywords: Tilting Mechanism, Slippage, Directional Stability, LeaningMaidir DearNoch keine Bewertungen
- New Microsoft Office Word Document-Converted - 2Dokument16 SeitenNew Microsoft Office Word Document-Converted - 2Sangam PatariNoch keine Bewertungen
- Manufacturing simple differential locking systemDokument8 SeitenManufacturing simple differential locking systemKirtiPadhiyarNoch keine Bewertungen
- Annasaheb Dange College of Engineering and Technology, AshtaDokument10 SeitenAnnasaheb Dange College of Engineering and Technology, AshtaDipak BhagatNoch keine Bewertungen
- Electromagnetic and Magnetic Suspension: IJEDR1703070 474Dokument8 SeitenElectromagnetic and Magnetic Suspension: IJEDR1703070 474Naani ChowdaryNoch keine Bewertungen
- 저속 무한궤도 차량의 클러치/브레이크 방식 조향 제어에 관한 연구 A Study on the Controllability of Clutch/Brake Steering for Low Speed Tracked VehiclesDokument10 Seiten저속 무한궤도 차량의 클러치/브레이크 방식 조향 제어에 관한 연구 A Study on the Controllability of Clutch/Brake Steering for Low Speed Tracked Vehiclesjai2009Noch keine Bewertungen
- Design and Analysis of Multipurpose Relief VehicleDokument13 SeitenDesign and Analysis of Multipurpose Relief VehicleIJRASETPublicationsNoch keine Bewertungen
- Basic Running Test of The Cylindrical Tracked Vehicle With Sideways MobilityDokument7 SeitenBasic Running Test of The Cylindrical Tracked Vehicle With Sideways Mobilityjazari technoNoch keine Bewertungen
- Scan Doc by CamScannerDokument1 SeiteScan Doc by CamScannerNasir AhsanNoch keine Bewertungen
- Researchpaper-Tidal Power An Effective Method of Generating Power PDFDokument5 SeitenResearchpaper-Tidal Power An Effective Method of Generating Power PDFVikash BhambhuNoch keine Bewertungen
- Tribology PDFDokument17 SeitenTribology PDFNasir AhsanNoch keine Bewertungen
- Gate Me Question Paper 2017 Set 2.pdf 20 PDFDokument19 SeitenGate Me Question Paper 2017 Set 2.pdf 20 PDFRutvik PatelNoch keine Bewertungen
- Solutions To Practice Questions On Limits PDFDokument16 SeitenSolutions To Practice Questions On Limits PDFNasir AhsanNoch keine Bewertungen
- Under The Guidance of Associate ProfessorDokument10 SeitenUnder The Guidance of Associate ProfessorNasir AhsanNoch keine Bewertungen
- Gontrol Engineering: Eighth C.20L5Ljan.20L6Dokument2 SeitenGontrol Engineering: Eighth C.20L5Ljan.20L6Nasir AhsanNoch keine Bewertungen
- 15ME51Dokument2 Seiten15ME51Nasir AhsanNoch keine Bewertungen
- ME GATE 2019 Session 1-QualifyGate PDFDokument47 SeitenME GATE 2019 Session 1-QualifyGate PDFNasir AhsanNoch keine Bewertungen
- N199Dokument6 SeitenN199Nasir AhsanNoch keine Bewertungen
- CIM Techniques and ApplicationsDokument39 SeitenCIM Techniques and ApplicationsAnilNoch keine Bewertungen
- MEC81Dokument3 SeitenMEC81Nasir AhsanNoch keine Bewertungen
- Pearson Gate 2015 Set 3 Me SPDokument16 SeitenPearson Gate 2015 Set 3 Me SPsunil481Noch keine Bewertungen
- Disha Publication Mechanical Concept Notes With Exercises VibrationsDokument11 SeitenDisha Publication Mechanical Concept Notes With Exercises VibrationsNasir AhsanNoch keine Bewertungen
- STULZ CyberCool1 Brochure 1806 EN PDFDokument12 SeitenSTULZ CyberCool1 Brochure 1806 EN PDFNikolayNoch keine Bewertungen
- TASK 71-00-00-811-831-A Low EPR N2 High - N2 To Governing Speed Before Rated EPR N1 Fuel Flow LowDokument1 SeiteTASK 71-00-00-811-831-A Low EPR N2 High - N2 To Governing Speed Before Rated EPR N1 Fuel Flow LowWidya DamayantiNoch keine Bewertungen
- KSB Product Portfolio Valves 2019Dokument72 SeitenKSB Product Portfolio Valves 2019M MNoch keine Bewertungen
- Experiment 3Dokument3 SeitenExperiment 3MaisarahNoch keine Bewertungen
- Aprilia Dorsoduro 750 EngDokument9 SeitenAprilia Dorsoduro 750 EngzekomocniNoch keine Bewertungen
- Design of A Slurry Erosion Test RigDokument14 SeitenDesign of A Slurry Erosion Test RigJulio HernandezNoch keine Bewertungen
- Linha Pesada Minas Soluções 2017.1Dokument129 SeitenLinha Pesada Minas Soluções 2017.1SenaMecánicaElectrónicaNoch keine Bewertungen
- TurbineDokument28 SeitenTurbinedilbagh_scribd100% (1)
- Buckling Analysis K Value CalculatorDokument3 SeitenBuckling Analysis K Value Calculatorrodriguez.gaytanNoch keine Bewertungen
- Stay Cable Specifications SummaryDokument21 SeitenStay Cable Specifications SummaryManukantShrotriyaNoch keine Bewertungen
- PDS1 Transmisi Air Bersih MCPK PumpDokument5 SeitenPDS1 Transmisi Air Bersih MCPK PumpBudi SNoch keine Bewertungen
- Quotation - 300mm and 250mm Jalan Reko-2Dokument11 SeitenQuotation - 300mm and 250mm Jalan Reko-2shabow_azwan0% (1)
- Steel Bridge DesignDokument286 SeitenSteel Bridge DesignChandralal SarathNoch keine Bewertungen
- Fluid Mechanics (ECH3113) - Chapter 3 Flow in PipesDokument110 SeitenFluid Mechanics (ECH3113) - Chapter 3 Flow in PipesTalal B. Osman100% (1)
- Perbedaan Seal Material ValveDokument3 SeitenPerbedaan Seal Material ValveahaaNoch keine Bewertungen
- Design, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDokument14 SeitenDesign, Implementation and Speed Estimation of Three Phase 2 KW Out Runner Permanent Magnet BLDC MotorDavid AzadNoch keine Bewertungen
- 786.vibration Analysis of Hybrid Composite Leaf SpringDokument6 Seiten786.vibration Analysis of Hybrid Composite Leaf SpringAmaterasu Susanoo TsukuyomiNoch keine Bewertungen
- Rigid body algorithm reduces cost of impact analysisDokument27 SeitenRigid body algorithm reduces cost of impact analysisMariano SerranoNoch keine Bewertungen
- 19 400E 3D RL FinalDokument4 Seiten19 400E 3D RL FinalJose Omar ZaragozaNoch keine Bewertungen
- CALCULOSDokument227 SeitenCALCULOSLuisHuamanQuilicheNoch keine Bewertungen
- HDD Lesson and LearnDokument10 SeitenHDD Lesson and Learnbagus handokoNoch keine Bewertungen
- Buckling of Beams With YuraDokument20 SeitenBuckling of Beams With YuraMario JacomeNoch keine Bewertungen
- BrochureDokument34 SeitenBrochurejadiNoch keine Bewertungen
- 19xrv 5ssDokument190 Seiten19xrv 5ssyasir305Noch keine Bewertungen
- Iseki TLE BrochureDokument8 SeitenIseki TLE BrochureTomas MigilinskasNoch keine Bewertungen
- Test Report OM3 - 180L - 4: 22,00 KW: ISO14000 ISO9001Dokument13 SeitenTest Report OM3 - 180L - 4: 22,00 KW: ISO14000 ISO9001Desmon GultomNoch keine Bewertungen
- Fishing Tools Services Catalog SchlumbergerDokument39 SeitenFishing Tools Services Catalog Schlumbergeralvaro_massimoNoch keine Bewertungen
- Steering & Brake Control SystemDokument13 SeitenSteering & Brake Control Systemfalah100% (1)
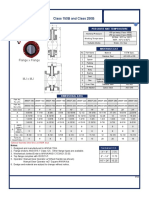
- AWWA C-504: Model 3900F & Model 3900MDokument2 SeitenAWWA C-504: Model 3900F & Model 3900MPriyanka rajpurohitNoch keine Bewertungen