Das könnte Ihnen auch gefallen
- A New Harmonics Elimination Method Applied To A Static VAR Compensator Using A Three Level InverterDokument16 SeitenA New Harmonics Elimination Method Applied To A Static VAR Compensator Using A Three Level InverterhoseinNoch keine Bewertungen
- Thyristor Converters or Controlled Converters: (1) Power CircuitDokument55 SeitenThyristor Converters or Controlled Converters: (1) Power CircuitAbdullrahman Al-ShammaaNoch keine Bewertungen
- Bee4113 Chapter 3Dokument30 SeitenBee4113 Chapter 3Kung ChinHan100% (17)
- Three Phase PWM RectDokument13 SeitenThree Phase PWM RectMridul MishraNoch keine Bewertungen
- PR Control For Two-Stage Matrix Converter Excitation Doubly Fed Wind Generation System Under Unbalanced Grid Voltage ConditionsDokument5 SeitenPR Control For Two-Stage Matrix Converter Excitation Doubly Fed Wind Generation System Under Unbalanced Grid Voltage ConditionsChetan GhatageNoch keine Bewertungen
- Analysis Vienna RectifierDokument8 SeitenAnalysis Vienna RectifierJose Luis RomeroNoch keine Bewertungen
- Application of Z-Source Converter in Photovoltaic Grid-Connected Transformer-Less InverterDokument5 SeitenApplication of Z-Source Converter in Photovoltaic Grid-Connected Transformer-Less InverterPaolo ProspNoch keine Bewertungen
- SpaceVector PWM InverterDokument35 SeitenSpaceVector PWM Invertersolomong50% (2)
- EE 5021: Power Converter Analysis and Design Sept2020-Jan2021 Assignment 3Dokument3 SeitenEE 5021: Power Converter Analysis and Design Sept2020-Jan2021 Assignment 3Raj JhaNoch keine Bewertungen
- HVDC Wreb 2023 SreedeviDokument68 SeitenHVDC Wreb 2023 SreedeviJEERATSE AMNoch keine Bewertungen
- 12 Pulse ConverterDokument5 Seiten12 Pulse ConvertersumitchintuNoch keine Bewertungen
- DC Bus Control of Back-to-Back Connected Two-Level PWM Rectifier-Five-Level NPC Voltage Source Inverter To Torque Ripple Reduction in Induction MotorDokument5 SeitenDC Bus Control of Back-to-Back Connected Two-Level PWM Rectifier-Five-Level NPC Voltage Source Inverter To Torque Ripple Reduction in Induction Motorfarid kerroucheNoch keine Bewertungen
- Exam 7.4.2016Dokument7 SeitenExam 7.4.2016malathynarayaniNoch keine Bewertungen
- Base (Reference) PaperDokument7 SeitenBase (Reference) Papermphaniteja2012Noch keine Bewertungen
- Warsaw RectifierDokument13 SeitenWarsaw Rectifiermariusz sNoch keine Bewertungen
- Fine Tuning of Cascaded D-Q Axis Controller For AC-DC-AC Converter Without DC Link Capacitor Using Artificial Neural NetworkDokument8 SeitenFine Tuning of Cascaded D-Q Axis Controller For AC-DC-AC Converter Without DC Link Capacitor Using Artificial Neural NetworkHedra GirgisNoch keine Bewertungen
- Week Eleventh On Eee327 3.33 Open-Circuit and Short-Circuit Tests On TransformerDokument8 SeitenWeek Eleventh On Eee327 3.33 Open-Circuit and Short-Circuit Tests On TransformerEzekiel IyamuNoch keine Bewertungen
- Voltage Harmonic Control of Z-Source Inverter For UPS ApplicationsDokument6 SeitenVoltage Harmonic Control of Z-Source Inverter For UPS ApplicationsR.SRIKANTHNoch keine Bewertungen
- Power Electronics: AC To DC Converters (Rectifiers)Dokument79 SeitenPower Electronics: AC To DC Converters (Rectifiers)Frew FrewNoch keine Bewertungen
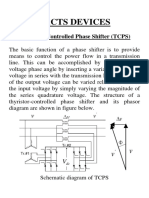
- Control Power Flow Using FACTS DevicesDokument8 SeitenControl Power Flow Using FACTS DeviceskhalidNoch keine Bewertungen
- ELEC313 Lab#4Dokument5 SeitenELEC313 Lab#4Ali MoharramNoch keine Bewertungen
- AC Voltage Controller Classification and Control StrategiesDokument6 SeitenAC Voltage Controller Classification and Control StrategiesTuhin ShahNoch keine Bewertungen
- Half Wave Single Phase Controlled Rectifier CircuitDokument32 SeitenHalf Wave Single Phase Controlled Rectifier CircuitDado GaudiNoch keine Bewertungen
- Lab 3Dokument10 SeitenLab 3Smshihab ShararNoch keine Bewertungen
- Buck, Boost and Buck-Boost Inverter ComparisonDokument6 SeitenBuck, Boost and Buck-Boost Inverter ComparisonIndra PratamaNoch keine Bewertungen
- CyclocovertersDokument4 SeitenCyclocovertersAlfredNoch keine Bewertungen
- Controlled RectifiersDokument16 SeitenControlled RectifiersVishal Parekh100% (2)
- Novel Control Scheme For 3-Phase PWM Current-Source Converters Under Unbalanced Source Voltage ConditionsDokument6 SeitenNovel Control Scheme For 3-Phase PWM Current-Source Converters Under Unbalanced Source Voltage ConditionsghiocelNoch keine Bewertungen
- Zaskalicky 2014Dokument6 SeitenZaskalicky 2014Berry BustanNoch keine Bewertungen
- University of Engineering & Technology LahoreDokument43 SeitenUniversity of Engineering & Technology LahoreKantesh KumarNoch keine Bewertungen
- Pedstc2020 Farbodsaedi 01510144Dokument5 SeitenPedstc2020 Farbodsaedi 0151014426765144Noch keine Bewertungen
- A D-Q Synchronous Frame Controller For Single Phase InverterDokument7 SeitenA D-Q Synchronous Frame Controller For Single Phase InvertershanNoch keine Bewertungen
- Model Predictive Current Control For High-Power Grid-Connected Converters With Output LCL FilterDokument6 SeitenModel Predictive Current Control For High-Power Grid-Connected Converters With Output LCL FilterM UMAR ABBASINoch keine Bewertungen
- Digital Control of Supercapacitor Energy Storage InterfaceDokument5 SeitenDigital Control of Supercapacitor Energy Storage InterfaceDipankar Mukherjee100% (1)
- Analytic Calculation of DC-Link Capacitor Current for Pulsed Three-Phase InvertersDokument9 SeitenAnalytic Calculation of DC-Link Capacitor Current for Pulsed Three-Phase InvertersjorrriqueNoch keine Bewertungen
- Impedance of RC Circuits: Series RC Circuits: Experiment No. 3Dokument17 SeitenImpedance of RC Circuits: Series RC Circuits: Experiment No. 3NicoNoch keine Bewertungen
- YEDITEPE UNIVERSITY ENGINEERING FACULTY POWER ELECTRONIC CIRCUITS LABDokument9 SeitenYEDITEPE UNIVERSITY ENGINEERING FACULTY POWER ELECTRONIC CIRCUITS LABDhananjay LimayeNoch keine Bewertungen
- Kazimierczuk1993 Voltage-Mode-Controlled PWM Buck20DC-DCDokument8 SeitenKazimierczuk1993 Voltage-Mode-Controlled PWM Buck20DC-DCHamidNoch keine Bewertungen
- Modeling and Control Design of A Static Synchronous Series CompensatorDokument6 SeitenModeling and Control Design of A Static Synchronous Series Compensatorsteffy ruizNoch keine Bewertungen
- Power Electronic Module - Chapter 3Dokument34 SeitenPower Electronic Module - Chapter 3jayxcellNoch keine Bewertungen
- AC-AC Converters Chapter Explains Voltage RegulationDokument22 SeitenAC-AC Converters Chapter Explains Voltage RegulationGebremichael Teklay GebretsadikNoch keine Bewertungen
- Harmonic Analysis of SVPWM Based Three Phase Inverter Using MATLAB SimulinkDokument6 SeitenHarmonic Analysis of SVPWM Based Three Phase Inverter Using MATLAB SimulinkEditor IJTSRDNoch keine Bewertungen
- P086Dokument4 SeitenP086arunghandwalNoch keine Bewertungen
- The Converter (Power Circuit) - 2. The D-STATCOM ControllerDokument42 SeitenThe Converter (Power Circuit) - 2. The D-STATCOM ControllersiddhardhaNoch keine Bewertungen
- Cycloconverters: Fig.1 Block Diagram of A CycloconverterDokument17 SeitenCycloconverters: Fig.1 Block Diagram of A Cycloconvertersagar jaiswal100% (3)
- Application of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemDokument12 SeitenApplication of A Fuzzy Self-Tuning PI Controller in A Grid-Connected PV Generation SystemZikra ElninoNoch keine Bewertungen
- Soft Switching of Modified Half Bridge Fly-Back ConverterDokument7 SeitenSoft Switching of Modified Half Bridge Fly-Back ConverterSaad Ul HasanNoch keine Bewertungen
- SPWMDokument21 SeitenSPWMamilah qisthiNoch keine Bewertungen
- Controlled Rectifier Single Phase Full WaveDokument7 SeitenControlled Rectifier Single Phase Full WaveJesus BecerraNoch keine Bewertungen
- 18EE53 MODULE 4-Dual ConvertorDokument8 Seiten18EE53 MODULE 4-Dual ConvertorAshwiniNoch keine Bewertungen
- AC to AC Converters Classification Includes Voltage Controllers Power CircuitsDokument26 SeitenAC to AC Converters Classification Includes Voltage Controllers Power Circuitsherokaboss1987Noch keine Bewertungen
- Study On Neutral-Point Voltage Balance of 3-Level NPC Inverter in 3-Phase 4-Wire SystemDokument5 SeitenStudy On Neutral-Point Voltage Balance of 3-Level NPC Inverter in 3-Phase 4-Wire SystemThe MatrixNoch keine Bewertungen
- Laboratory NR 3Dokument8 SeitenLaboratory NR 3IonutNoch keine Bewertungen
- Matrix Converter Induction Motor Drive - Modeling - SimulationDokument9 SeitenMatrix Converter Induction Motor Drive - Modeling - Simulationjoseph86177Noch keine Bewertungen
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Von EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Noch keine Bewertungen
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsVon EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNoch keine Bewertungen
- Homework 1: Circuit Analysis and Power Factor CorrectionDokument1 SeiteHomework 1: Circuit Analysis and Power Factor CorrectionYazid AbouchihabeddineNoch keine Bewertungen
- ZbusDokument1 SeiteZbusYazid AbouchihabeddineNoch keine Bewertungen
- Fault DetectionDokument1 SeiteFault DetectionYazid AbouchihabeddineNoch keine Bewertungen
- Modelling MachineDokument72 SeitenModelling MachineYazid AbouchihabeddineNoch keine Bewertungen
- 4 106-2Dokument7 Seiten4 106-2ni60Noch keine Bewertungen
- Fault DiagnosticDokument1 SeiteFault DiagnosticYazid AbouchihabeddineNoch keine Bewertungen
- Electrical Signature AnalysisDokument25 SeitenElectrical Signature AnalysisChandradeep BanerjeeNoch keine Bewertungen
- Homework 1: Circuit Analysis and Power Factor CorrectionDokument1 SeiteHomework 1: Circuit Analysis and Power Factor CorrectionYazid AbouchihabeddineNoch keine Bewertungen
- Fundamentals of TLDokument18 SeitenFundamentals of TLYazid AbouchihabeddineNoch keine Bewertungen
- Ee 0403 Power System Operation and Control: Dr. R.Jegatheesan Professor, EEE Department SRM UniversityDokument26 SeitenEe 0403 Power System Operation and Control: Dr. R.Jegatheesan Professor, EEE Department SRM UniversitySylvesterJunior100% (1)
- Ece320 HWS5Dokument2 SeitenEce320 HWS5Yazid AbouchihabeddineNoch keine Bewertungen
- Cooling of Transformer: Unit 3 Electrical Machine DesignDokument13 SeitenCooling of Transformer: Unit 3 Electrical Machine DesignYazid AbouchihabeddineNoch keine Bewertungen
- Probtransformer ErannaDokument18 SeitenProbtransformer ErannaArun GopiNoch keine Bewertungen
- .. Répondre Directement Sur Cette Feuille Aux Endroits Indiqués Par Des PointillésDokument1 Seite.. Répondre Directement Sur Cette Feuille Aux Endroits Indiqués Par Des PointillésYazid AbouchihabeddineNoch keine Bewertungen
- Probtransformer ErannaDokument18 SeitenProbtransformer ErannaArun GopiNoch keine Bewertungen
- E TutorialDokument7 SeitenE TutorialRicardo Alexis Fuentes LufittNoch keine Bewertungen
- Design of Electrical Apparatus Solved ProblemsDokument14 SeitenDesign of Electrical Apparatus Solved ProblemsRichard RegidorNoch keine Bewertungen
- EE368 Transmission Line BasicsDokument11 SeitenEE368 Transmission Line BasicseloiNoch keine Bewertungen
- Probtransformer ErannaDokument18 SeitenProbtransformer ErannaArun GopiNoch keine Bewertungen
- Transmission Line EquationsDokument26 SeitenTransmission Line Equationsilg1Noch keine Bewertungen
- Standing Wave Patterns: V V V I ZDokument16 SeitenStanding Wave Patterns: V V V I ZYazid AbouchihabeddineNoch keine Bewertungen
- Lecture 19Dokument18 SeitenLecture 19Yazid AbouchihabeddineNoch keine Bewertungen
- Lattice DiagramDokument19 SeitenLattice DiagramDDragos GeorgeNoch keine Bewertungen
- Smith Chart BasicsDokument27 SeitenSmith Chart BasicsSebastin SureshNoch keine Bewertungen
- 7 - Impedence Matching of TLDokument15 Seiten7 - Impedence Matching of TLYazid AbouchihabeddineNoch keine Bewertungen
- 4 Transmission Lines An D Cables: Distributed Parameter ModelDokument5 Seiten4 Transmission Lines An D Cables: Distributed Parameter ModelYazid AbouchihabeddineNoch keine Bewertungen
- Probtransformer ErannaDokument18 SeitenProbtransformer ErannaArun GopiNoch keine Bewertungen
- ECE 330 Power Circuits and Electromechanics: Dynamics of Lumped Mechanical SystemsDokument29 SeitenECE 330 Power Circuits and Electromechanics: Dynamics of Lumped Mechanical SystemsYazid AbouchihabeddineNoch keine Bewertungen
- Synchronous Machines (2) : ECE 330 Power Circuits and ElectromechanicsDokument18 SeitenSynchronous Machines (2) : ECE 330 Power Circuits and ElectromechanicsYazid AbouchihabeddineNoch keine Bewertungen
- ECE 330 Power Circuits and Electromechanics: Dynamics of Lumped Mechanical SystemsDokument29 SeitenECE 330 Power Circuits and Electromechanics: Dynamics of Lumped Mechanical SystemsYazid AbouchihabeddineNoch keine Bewertungen
- Learn Machinery Diagnosis with Versatile Fault SimulatorDokument16 SeitenLearn Machinery Diagnosis with Versatile Fault SimulatorDrAnkuran Saha0% (1)
- Amity University Greater Noida: in Partial Fulfillment Toward The Award ofDokument18 SeitenAmity University Greater Noida: in Partial Fulfillment Toward The Award oftestingNoch keine Bewertungen
- Improving transient stability using AVR, governor and PSSDokument8 SeitenImproving transient stability using AVR, governor and PSSAnas MahmoodNoch keine Bewertungen
- RRU3806 Description: Huawei Technologies Co., LTDDokument12 SeitenRRU3806 Description: Huawei Technologies Co., LTDKibar SEMİZNoch keine Bewertungen
- Galaxy G1 User ManualDokument70 SeitenGalaxy G1 User ManualRandy Mucha V.Noch keine Bewertungen
- Vigirex 50437Dokument2 SeitenVigirex 50437AhmedNoch keine Bewertungen
- Mechatronics Systems Design and PLC ProgrammingDokument7 SeitenMechatronics Systems Design and PLC ProgrammingVkrthirumalai RamanathanNoch keine Bewertungen
- Schematic SMPS-PFC Sheet-1 20190424001902 PDFDokument1 SeiteSchematic SMPS-PFC Sheet-1 20190424001902 PDFАлексей АндрияшNoch keine Bewertungen
- Rumsey Soundandrecording ReviewDokument3 SeitenRumsey Soundandrecording ReviewJorge MartinezNoch keine Bewertungen
- Internship Report - OfficialDokument16 SeitenInternship Report - OfficialKarizze NarcisoNoch keine Bewertungen
- ELEFW328 (LE-32GT7-B3) Service Manual For ELEMENT PDFDokument69 SeitenELEFW328 (LE-32GT7-B3) Service Manual For ELEMENT PDFdeng jianyu100% (1)
- YAMAHA RX-V393 User GuideDokument43 SeitenYAMAHA RX-V393 User GuideJuan GutierrezNoch keine Bewertungen
- AN4069Dokument10 SeitenAN4069diegooliveira101010Noch keine Bewertungen
- Trusted System Training Manual (Rev. 3 - 0)Dokument328 SeitenTrusted System Training Manual (Rev. 3 - 0)Mijail David Felix NarvaezNoch keine Bewertungen
- Evermotion Archinteriors PDFDokument2 SeitenEvermotion Archinteriors PDFAllisonNoch keine Bewertungen
- 05 Electrical CharacteristicsDokument16 Seiten05 Electrical CharacteristicsSandesh Kumar B VNoch keine Bewertungen
- Physics Project on Photo-Detector & LED UsesDokument14 SeitenPhysics Project on Photo-Detector & LED UsesVARUN COMPUTERSNoch keine Bewertungen
- Construction of A Homemade Toroidal Transformer3Dokument5 SeitenConstruction of A Homemade Toroidal Transformer3tongaiNoch keine Bewertungen
- DS IM120417015 Dual Step Motor Driver ShieldDokument3 SeitenDS IM120417015 Dual Step Motor Driver ShieldJohn Doe100% (1)
- AirWatch Device Features Summary v8 - 1Dokument3 SeitenAirWatch Device Features Summary v8 - 1Razvan CristeaNoch keine Bewertungen
- How To Build A PIC16F84 Servo ControllerDokument5 SeitenHow To Build A PIC16F84 Servo ControllerCảnh ManuNoch keine Bewertungen
- BJT Biasing (Complete)Dokument64 SeitenBJT Biasing (Complete)Hung PhamNoch keine Bewertungen
- Lab 4 - Properties of The Op-Amp 1 (Buffer Non Inverting Op-Amp)Dokument9 SeitenLab 4 - Properties of The Op-Amp 1 (Buffer Non Inverting Op-Amp)Alia Atikah100% (1)
- The RCD Handbook: Beama Guide To The Selection and Application of Residual Current Devices (RCDS)Dokument42 SeitenThe RCD Handbook: Beama Guide To The Selection and Application of Residual Current Devices (RCDS)winusNoch keine Bewertungen
- Ram 1234Dokument25 SeitenRam 1234Nicholas GonzalezNoch keine Bewertungen
- VARTA BATTERIES Productsheet - 5401260333132Dokument2 SeitenVARTA BATTERIES Productsheet - 5401260333132supljinaNoch keine Bewertungen
- Soldadura Manual KukaDokument78 SeitenSoldadura Manual KukaEduardoNoch keine Bewertungen
- CV Idir Mahrouche - 3 PDFDokument2 SeitenCV Idir Mahrouche - 3 PDFIdirMahroucheNoch keine Bewertungen
- Microelectromechanical Assignment HelpDokument23 SeitenMicroelectromechanical Assignment HelpMechanical Engineering Assignment HelpNoch keine Bewertungen
- 1C96944H02 Letter 150dpiDokument20 Seiten1C96944H02 Letter 150dpiMBMNoch keine Bewertungen