Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- PID1Dokument9 SeitenPID1rocaoNoch keine Bewertungen
- FAM3 1 McEachern 61000 4 30 StandardXDokument12 SeitenFAM3 1 McEachern 61000 4 30 StandardXWillian XavierNoch keine Bewertungen
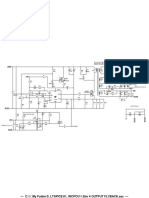
- C:/1. My Folder/9. LTSPICE/01. RICPCU/1.Sim 4 OUTPUT FLYBACK - AscDokument1 SeiteC:/1. My Folder/9. LTSPICE/01. RICPCU/1.Sim 4 OUTPUT FLYBACK - AscrocaoNoch keine Bewertungen
- 50 60hz Inductor DesignDokument5 Seiten50 60hz Inductor DesignrocaoNoch keine Bewertungen
- FR530Dokument7 SeitenFR530rocaoNoch keine Bewertungen
- Tap ChangerDokument14 SeitenTap ChangerrocaoNoch keine Bewertungen
- Learning PlatformDokument12 SeitenLearning PlatformrocaoNoch keine Bewertungen
- Loss Power of Abb Igbts - 5sya 2053-04Dokument6 SeitenLoss Power of Abb Igbts - 5sya 2053-04rocaoNoch keine Bewertungen
- Magetic Design For InverterDokument2 SeitenMagetic Design For InverterrocaoNoch keine Bewertungen
- DSP DS1104 Electric Drives - LabDokument2 SeitenDSP DS1104 Electric Drives - LabrocaoNoch keine Bewertungen
- ObsCPMT PDFDokument14 SeitenObsCPMT PDFrocaoNoch keine Bewertungen
- A 55 KW Three-Phase Inverter With Si Igbts and Sic Schottky DiodesDokument7 SeitenA 55 KW Three-Phase Inverter With Si Igbts and Sic Schottky DiodesrocaoNoch keine Bewertungen
- LatchesDokument7 SeitenLatchesrocaoNoch keine Bewertungen
- PPL PDFDokument18 SeitenPPL PDFrocaoNoch keine Bewertungen
- 15A Current Sense PDFDokument33 Seiten15A Current Sense PDFrocaoNoch keine Bewertungen
- GPU - SinePower PDFDokument4 SeitenGPU - SinePower PDFrocaoNoch keine Bewertungen
- DSP DS1104 Electric Drives - LabDokument2 SeitenDSP DS1104 Electric Drives - LabrocaoNoch keine Bewertungen
- Trig IndentitiesDokument7 SeitenTrig IndentitiesrocaoNoch keine Bewertungen
- OBD II Specifications and Connections PDFDokument4 SeitenOBD II Specifications and Connections PDFrocaoNoch keine Bewertungen
- 3 Phase Voltage FolumarsDokument12 Seiten3 Phase Voltage FolumarsrocaoNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Optimization of AirfoilsDokument9 SeitenOptimization of AirfoilsMD SHAHRIARMAHMUDNoch keine Bewertungen
- Kenelm Digby On Quantity As Divisibility PDFDokument28 SeitenKenelm Digby On Quantity As Divisibility PDFvalexandrescuNoch keine Bewertungen
- Computer Shortcut Keys SystemDokument5 SeitenComputer Shortcut Keys SystemNo RebelNoch keine Bewertungen
- A.Van - Dam and Zegeling RobustFVM1DHyperbolicfromMagnetohydrodynamicsDokument30 SeitenA.Van - Dam and Zegeling RobustFVM1DHyperbolicfromMagnetohydrodynamicsSedanur Mazı GözenNoch keine Bewertungen
- User Manual: Shimadzu Advanced Flow Technology: Heart Cut SoftwareDokument19 SeitenUser Manual: Shimadzu Advanced Flow Technology: Heart Cut SoftwareHarold GamaNoch keine Bewertungen
- DRV8353Dokument92 SeitenDRV8353Lu HoaNoch keine Bewertungen
- 2010-12 600 800 Rush Switchback RMK Service Manual PDFDokument430 Seiten2010-12 600 800 Rush Switchback RMK Service Manual PDFBrianCook73% (11)
- Specalog For Cat 938K Sugarcane Handler AEHQ8046-02Dokument1 SeiteSpecalog For Cat 938K Sugarcane Handler AEHQ8046-02diegosoareshotmail.frNoch keine Bewertungen
- Guide-Tone Space - Navigating Voice-Leading Syntax in Tonal JazzDokument23 SeitenGuide-Tone Space - Navigating Voice-Leading Syntax in Tonal JazzCacau Ricardo FerrariNoch keine Bewertungen
- Quarter I Subject: GENERAL Mathematics Date: - Content Standard Performance Standard Learning Competency M11GM-Ia-4Dokument4 SeitenQuarter I Subject: GENERAL Mathematics Date: - Content Standard Performance Standard Learning Competency M11GM-Ia-4PatzAlzateParaguyaNoch keine Bewertungen
- Fy CS Labbook 2019 20Dokument46 SeitenFy CS Labbook 2019 20rajeshkanade121Noch keine Bewertungen
- gp2 Speed IncreaserDokument2 Seitengp2 Speed Increasermayur22785Noch keine Bewertungen
- Service Brake: Model FB (Air Over Hydraulic Brake)Dokument97 SeitenService Brake: Model FB (Air Over Hydraulic Brake)Komatsu Perkins HitachiNoch keine Bewertungen
- Week 1Dokument3 SeitenWeek 1DELMAR REYES100% (1)
- Thermal Analysis of Concrete DamDokument9 SeitenThermal Analysis of Concrete DamchayoubhaasNoch keine Bewertungen
- The Platform of Choice: Stevenson, Manufacturer of The FMTV A1, Is Proud To Support The UnitedDokument4 SeitenThe Platform of Choice: Stevenson, Manufacturer of The FMTV A1, Is Proud To Support The UnitedppNoch keine Bewertungen
- Beam Number: Project Name: 17-Mar-20 Engr. Mark Christian D. Esguerra Passed Engineer: DateDokument1 SeiteBeam Number: Project Name: 17-Mar-20 Engr. Mark Christian D. Esguerra Passed Engineer: DateMark Christian EsguerraNoch keine Bewertungen
- RC2 22873Dokument2 SeitenRC2 22873Henok AlemayehuNoch keine Bewertungen
- Inductive Sensor NCB2-12GM35-N0-V1: DimensionsDokument3 SeitenInductive Sensor NCB2-12GM35-N0-V1: DimensionsmhaioocNoch keine Bewertungen
- Reversi (Othello) - Game StrategyDokument11 SeitenReversi (Othello) - Game StrategysuperyoopyNoch keine Bewertungen
- Structural SteelDokument17 SeitenStructural SteelliNoch keine Bewertungen
- QuestionsDokument9 SeitenQuestionsPlutoNoch keine Bewertungen
- g484 Physics Newtonian World Notes Ocr Robbie PeckDokument10 Seiteng484 Physics Newtonian World Notes Ocr Robbie Peckapi-236179294Noch keine Bewertungen
- Grade 10: Mathematics Structuring Competencies in A Definitive Budget of WorkDokument2 SeitenGrade 10: Mathematics Structuring Competencies in A Definitive Budget of Worksher blasNoch keine Bewertungen
- Science Spoofs, Physics Pranks and Astronomical Antics: Docslugtoast@phas - Ubc.caDokument30 SeitenScience Spoofs, Physics Pranks and Astronomical Antics: Docslugtoast@phas - Ubc.cabeemanNoch keine Bewertungen
- Chapter - 20 3-6-05Dokument30 SeitenChapter - 20 3-6-05samandondonNoch keine Bewertungen
- Summa Roll Cutters: S One - S Class 2 Series World Renowned Vinyl and Contour CuttersDokument32 SeitenSumma Roll Cutters: S One - S Class 2 Series World Renowned Vinyl and Contour CuttersPU PUNoch keine Bewertungen
- TAB Procedural Standard 2015Dokument84 SeitenTAB Procedural Standard 2015Kerx EndranoNoch keine Bewertungen
- Engine Removal and DisassemblyDokument12 SeitenEngine Removal and DisassemblyMinh MinhNoch keine Bewertungen
- MK3 Harness PinoutDokument12 SeitenMK3 Harness Pinoutluis5107Noch keine Bewertungen