Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Autonomous Robot Lidar RosDokument19 SeitenAutonomous Robot Lidar Rosbunny creationsNoch keine Bewertungen
- Ai Unit 5Dokument16 SeitenAi Unit 5Mukeshram.B AIDS20Noch keine Bewertungen
- Inner Monologue: Embodied Reasoning Through Planning With Language ModelsDokument25 SeitenInner Monologue: Embodied Reasoning Through Planning With Language ModelsAkshay ChaturvediNoch keine Bewertungen
- Workshop On Multi-Agent Path Finding - IJCAI-20: Wolfgang H Onig January 7, 2021Dokument55 SeitenWorkshop On Multi-Agent Path Finding - IJCAI-20: Wolfgang H Onig January 7, 2021WuScNoch keine Bewertungen
- Agv Path Planning Based On Smoothing A AlgorithmDokument8 SeitenAgv Path Planning Based On Smoothing A AlgorithmAnonymous rVWvjCRLGNoch keine Bewertungen
- A Study in Industrial Robot ProgrammingDokument26 SeitenA Study in Industrial Robot ProgrammingPatel Dhaval100% (1)
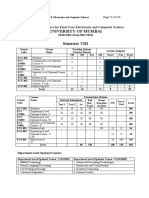
- B.E. Ecs Sem Viii SyllabusDokument66 SeitenB.E. Ecs Sem Viii Syllabus8816 Gautam ManuelNoch keine Bewertungen
- Snake Robots Seminar ReportDokument31 SeitenSnake Robots Seminar ReportSaeed Najd MohtashamNoch keine Bewertungen
- Principles of Robot Motion MITDokument831 SeitenPrinciples of Robot Motion MITalvarito12100% (1)
- ATT13 IeconDokument6 SeitenATT13 IeconJohn ArvanitakisNoch keine Bewertungen
- Collaborative Optimization of Storage Location AssDokument27 SeitenCollaborative Optimization of Storage Location AssNiguno ReconocidoNoch keine Bewertungen
- GPS Based Robot Navigation For Field Mobile Robot PaperDokument16 SeitenGPS Based Robot Navigation For Field Mobile Robot PaperSigfred Vincent LarotNoch keine Bewertungen
- Snake Robot Research PaperDokument7 SeitenSnake Robot Research Paperikrndjvnd100% (1)
- Example Fuzzy LogicDokument55 SeitenExample Fuzzy Logicandi kardeNoch keine Bewertungen
- A Survey On Vision Based UAV NavigationDokument13 SeitenA Survey On Vision Based UAV NavigationchandrakanthatsNoch keine Bewertungen
- Midsem PyqDokument4 SeitenMidsem Pyqjuee chandrachudNoch keine Bewertungen
- A Human-Like Decision Intelligence For Obstacle Avoidance in Autonomous Vehicle ParkingDokument20 SeitenA Human-Like Decision Intelligence For Obstacle Avoidance in Autonomous Vehicle ParkingRAFIF MUHAMMAD RASYADNoch keine Bewertungen
- Parallel Implementation of Lee Algorithm: Project ReportDokument37 SeitenParallel Implementation of Lee Algorithm: Project ReportSam Paurac MalawaniNoch keine Bewertungen
- Obstacle AvoidanceDokument24 SeitenObstacle AvoidanceShubhadeep ChowdhuryNoch keine Bewertungen
- Deep Learning Rooted Potential Piloted RRT For Expeditious Path PlanningDokument8 SeitenDeep Learning Rooted Potential Piloted RRT For Expeditious Path PlanningSnehal Reddy KoukuntlaNoch keine Bewertungen
- Mobile Robot Control On A Reference Path: Gregor Klan Car, Drago Matko, Sa So Bla Zi CDokument6 SeitenMobile Robot Control On A Reference Path: Gregor Klan Car, Drago Matko, Sa So Bla Zi Cizzuan ismailNoch keine Bewertungen
- Your Big IdeaDokument18 SeitenYour Big IdeaYuvatejasviNoch keine Bewertungen
- TS5040 - LabVIEW Robotics Starter Kit (DaNI) Lab ExercisesfDokument25 SeitenTS5040 - LabVIEW Robotics Starter Kit (DaNI) Lab Exercisesfsivani05Noch keine Bewertungen
- 08 Trajectoryoptimization1 SlidesDokument15 Seiten08 Trajectoryoptimization1 SlidesBavantha UdugamaNoch keine Bewertungen
- Path Planning Using VrepDokument4 SeitenPath Planning Using VrepesatjournalsNoch keine Bewertungen
- Robot ProgrammingDokument130 SeitenRobot ProgrammingVinayak Deshmukh100% (1)
- Automatic Search Space Generation With Hierarchical Adaptive Flood Filled For Simulation and Computer Game in Confined EnvironmentDokument6 SeitenAutomatic Search Space Generation With Hierarchical Adaptive Flood Filled For Simulation and Computer Game in Confined EnvironmenthalanmeloNoch keine Bewertungen
- SLAM IntroductionDokument14 SeitenSLAM IntroductionMuthukumaranNoch keine Bewertungen
- Robotics Unit-4Dokument83 SeitenRobotics Unit-4S19IT1215 HarshithaNoch keine Bewertungen