Das könnte Ihnen auch gefallen
- Hadware in The Loop Relevador DistanciaDokument8 SeitenHadware in The Loop Relevador DistanciaMiguel ToroNoch keine Bewertungen
- Tarea Equipo 1Dokument3 SeitenTarea Equipo 1Miguel ToroNoch keine Bewertungen
- Reporte NLC PDFDokument24 SeitenReporte NLC PDFMiguel ToroNoch keine Bewertungen
- Z InverterDokument10 SeitenZ InverterMiguel ToroNoch keine Bewertungen
- Modelado de Líneas de TransmisiónDokument2 SeitenModelado de Líneas de TransmisiónMiguel ToroNoch keine Bewertungen
- Líneas de TransmisiónDokument2 SeitenLíneas de TransmisiónMiguel ToroNoch keine Bewertungen
- Lab ProteccionesDokument19 SeitenLab ProteccionesMiguel ToroNoch keine Bewertungen
- Z InverterDokument10 SeitenZ InverterMiguel ToroNoch keine Bewertungen
- Linealizacion PenduloDokument5 SeitenLinealizacion PenduloMiguel ToroNoch keine Bewertungen
- MoralesDokument24 SeitenMoralesMiguel ToroNoch keine Bewertungen
- Convertidor ZDokument9 SeitenConvertidor ZMiguel ToroNoch keine Bewertungen
- Mps 06 Transformada Z PDFDokument95 SeitenMps 06 Transformada Z PDFCarlos AndrésNoch keine Bewertungen
- Z InverterDokument10 SeitenZ InverterMiguel ToroNoch keine Bewertungen
- Convertidor ZDokument9 SeitenConvertidor ZMiguel ToroNoch keine Bewertungen
- Buck Bost - Miguel ToroDokument5 SeitenBuck Bost - Miguel ToroMiguel ToroNoch keine Bewertungen
- Ejercicio 5Dokument4 SeitenEjercicio 5Miguel ToroNoch keine Bewertungen
- TareaDokument4 SeitenTareaMiguel ToroNoch keine Bewertungen
- Ejercicios Grupos 1Dokument1 SeiteEjercicios Grupos 1Miguel ToroNoch keine Bewertungen
- 01 DGM01 de 01Dokument4 Seiten01 DGM01 de 01Miguel ToroNoch keine Bewertungen
- Tablas RectificadoresDokument2 SeitenTablas RectificadoresMiguel ToroNoch keine Bewertungen
- Tarea 2 - Buck Bost - Miguel ToroDokument4 SeitenTarea 2 - Buck Bost - Miguel ToroMiguel ToroNoch keine Bewertungen
- Modelado de STVDokument224 SeitenModelado de STVcamibensoNoch keine Bewertungen
- Linealización Del Pendulo InvertidoDokument5 SeitenLinealización Del Pendulo InvertidoMiguel ToroNoch keine Bewertungen
- Instructivo Del Tramite PDFDokument5 SeitenInstructivo Del Tramite PDFMarcos OnrevaNoch keine Bewertungen
- Ejercicios Grupos 1Dokument1 SeiteEjercicios Grupos 1Miguel ToroNoch keine Bewertungen
- Instructivo Del TramiteDokument1 SeiteInstructivo Del TramiteMiguel ToroNoch keine Bewertungen
- Control de Sistemas No Lineales - Sira RamirezDokument17 SeitenControl de Sistemas No Lineales - Sira RamirezDiego MV100% (1)
- AfínDokument5 SeitenAfínErika Gisel Velazquez RuizNoch keine Bewertungen
- Ejercicios Grupos 1Dokument1 SeiteEjercicios Grupos 1Miguel ToroNoch keine Bewertungen
- Clase 1309 Evaluación Formativa EBADokument44 SeitenClase 1309 Evaluación Formativa EBATucto Mariano YaneNoch keine Bewertungen
- POES Practica Profesional II - UNIDAD IIDokument6 SeitenPOES Practica Profesional II - UNIDAD IIOmar Cubas EncinasNoch keine Bewertungen
- Capítulo 2A Hardware Systems y LPARsDokument53 SeitenCapítulo 2A Hardware Systems y LPARsAlejandro Ponce0% (1)
- Catalogo Parque Infantil MetalicoDokument27 SeitenCatalogo Parque Infantil MetalicoJaime PazNoch keine Bewertungen
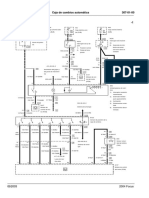
- (FORD) Diagrama de Cableado-TransmisionDokument2 Seiten(FORD) Diagrama de Cableado-TransmisionMaxisys Autel100% (1)
- Escala VDokument17 SeitenEscala VSandraNoch keine Bewertungen
- Ficha TecnicaDokument2 SeitenFicha TecnicaSilvia Roxana Quisihualpa CarrascoNoch keine Bewertungen
- 10 Semana REPORTE DE MANTENIMIENTODokument6 Seiten10 Semana REPORTE DE MANTENIMIENTOAlexander Marcos ChacaliazaNoch keine Bewertungen
- Manco-Et-Al 2022 Descriptores Achiote PDFDokument66 SeitenManco-Et-Al 2022 Descriptores Achiote PDFEdgar Percy Burgos ReynaNoch keine Bewertungen
- Cfdi 20230420104854 FV010 FUN0000002383 014996Dokument1 SeiteCfdi 20230420104854 FV010 FUN0000002383 014996Jose Jaime Altamirano RosasNoch keine Bewertungen
- Prueba 1 II Parcial (IEEE802.11) - Revisión Del IntentoDokument5 SeitenPrueba 1 II Parcial (IEEE802.11) - Revisión Del IntentoJomaira MaribelNoch keine Bewertungen
- Determinación de La Actividad Floculante de La Pectina en Soluciones de Hierro (III) y Cromo (III)Dokument7 SeitenDeterminación de La Actividad Floculante de La Pectina en Soluciones de Hierro (III) y Cromo (III)Cristian LeosNoch keine Bewertungen
- Reporte Lectura Home DepotDokument2 SeitenReporte Lectura Home DepotHogla Herrera BernardoNoch keine Bewertungen
- Manual de PsicomagiaDokument3 SeitenManual de Psicomagiaanon_853017717Noch keine Bewertungen
- Puerto de Santa Cruz de TenerifeDokument7 SeitenPuerto de Santa Cruz de TenerifeLiz MontecinosNoch keine Bewertungen
- Fci Pionero FFDokument1 SeiteFci Pionero FFJhonny GiulianoNoch keine Bewertungen
- 1 Intento Examen FinalDokument6 Seiten1 Intento Examen FinalCaliche RojasNoch keine Bewertungen
- Diagrama de IshikawaDokument5 SeitenDiagrama de IshikawaAlejandro Castro CalleNoch keine Bewertungen
- Principal Sucursal TallerDokument3 SeitenPrincipal Sucursal TallerAndy EstupiñánNoch keine Bewertungen
- La Estrella Robada - Mary Higgins ClarkDokument127 SeitenLa Estrella Robada - Mary Higgins ClarkMartha OchoaNoch keine Bewertungen
- Autocontaminación de La Ropa en La Investigación de Microplásticos - En.esDokument7 SeitenAutocontaminación de La Ropa en La Investigación de Microplásticos - En.esErick Cedeño VasquezNoch keine Bewertungen
- Guía #15, Grado Jardin.Dokument12 SeitenGuía #15, Grado Jardin.Mirian BuelvasNoch keine Bewertungen
- Protocolo EmpresarialDokument1 SeiteProtocolo Empresarialhenry Miranda ArteagaNoch keine Bewertungen
- Mnppaih1 7Dokument18 SeitenMnppaih1 7Paulina SalazarNoch keine Bewertungen
- Informe de RecristalizacionDokument19 SeitenInforme de RecristalizacionJavier RodriguezNoch keine Bewertungen
- Plan de Trabajo.Dokument10 SeitenPlan de Trabajo.Thiago Andres Ruiz RobledoNoch keine Bewertungen
- Ficha 1 Uso Grapas CrosbyDokument1 SeiteFicha 1 Uso Grapas Crosbygerman muriel corimanya0% (1)
- Índice de Plan de Negocio de RopaDokument7 SeitenÍndice de Plan de Negocio de RopaManfred Carrasco Duran100% (2)
- Practica de ClaseDokument1 SeitePractica de ClaseRaluj SheyNoch keine Bewertungen
- Eso Vaaaaaaaaaaaaaaaaaaa PDFDokument3 SeitenEso Vaaaaaaaaaaaaaaaaaaa PDFjuan alberto barrios torreglozaNoch keine Bewertungen