Das könnte Ihnen auch gefallen
- Anais Do Workshop De Micro-ondasVon EverandAnais Do Workshop De Micro-ondasNoch keine Bewertungen
- Micro Controller Lab Manual (06ESL47)Dokument67 SeitenMicro Controller Lab Manual (06ESL47)aamreen818Noch keine Bewertungen
- Lab ManualDokument68 SeitenLab ManualGopinath B L NaiduNoch keine Bewertungen
- ES FileDokument41 SeitenES FileAman GargNoch keine Bewertungen
- Embedded CDokument21 SeitenEmbedded Ckarthiha megavarnamNoch keine Bewertungen
- 21bec0400 VL2022230502402 Ast01Dokument9 Seiten21bec0400 VL2022230502402 Ast01Ashwin Raj 21BEC0400Noch keine Bewertungen
- 2-Microcontroller 8051, Organization and Architecture-08!01!2024Dokument35 Seiten2-Microcontroller 8051, Organization and Architecture-08!01!2024rupinsgmNoch keine Bewertungen
- 8051 Assembly Language ExamDokument10 Seiten8051 Assembly Language ExamEvliya ÜlkerNoch keine Bewertungen
- Reference Material 4 03-Sep-2021 Module 3Dokument134 SeitenReference Material 4 03-Sep-2021 Module 3Anirudh sai ReddyNoch keine Bewertungen
- ProgramsDokument24 SeitenProgramsP HAMSA DATTA0% (1)
- Assignment Questions-MicrocontrollerDokument1 SeiteAssignment Questions-MicrocontrollerharshithaNoch keine Bewertungen
- Problem Sheet MicrocontrollerDokument2 SeitenProblem Sheet MicrocontrollerNitesh Kumar DubeyNoch keine Bewertungen
- Module 3Dokument14 SeitenModule 3Rohit AnejaNoch keine Bewertungen
- ESD TutoDokument5 SeitenESD TutoSwaroop MohapatraNoch keine Bewertungen
- 16bec0656 VL2018191003859 Ast01 PDFDokument15 Seiten16bec0656 VL2018191003859 Ast01 PDFking kongNoch keine Bewertungen
- Micro ProcessorDokument27 SeitenMicro ProcessorGAYATHRI0923Noch keine Bewertungen
- 8051 - Lab Manual - OldDokument54 Seiten8051 - Lab Manual - Oldlalitkr129953Noch keine Bewertungen
- PrintDokument27 SeitenPrintRohan SinghNoch keine Bewertungen
- 21bec2017 MPMCL Da 1Dokument15 Seiten21bec2017 MPMCL Da 1Clips HUBNoch keine Bewertungen
- Experiment 11 USART Programming in 8051: 11.1. Aim(s) / Objective(s) / PurposeDokument3 SeitenExperiment 11 USART Programming in 8051: 11.1. Aim(s) / Objective(s) / Purposepraveenembd1Noch keine Bewertungen
- The 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingDokument297 SeitenThe 8051 Microcontroller and Embedded Systems: 8051 Assembly Language ProgrammingShalini BaruahNoch keine Bewertungen
- PowerElectronics Class6Dokument26 SeitenPowerElectronics Class6Keyur PatelNoch keine Bewertungen
- Lab Sheet For Chapter 9Dokument26 SeitenLab Sheet For Chapter 9karnsushantlalNoch keine Bewertungen
- Programming 8051 MicrocontrollerDokument121 SeitenProgramming 8051 MicrocontrollertakenoveraccountNoch keine Bewertungen
- ESI Record RemovedDokument17 SeitenESI Record Removedsangee20039Noch keine Bewertungen
- Module2 - 8051 Instruction Set - UpdatedDokument32 SeitenModule2 - 8051 Instruction Set - UpdatedPraveen G MNoch keine Bewertungen
- Micro Controller LabDokument33 SeitenMicro Controller LabberihuteNoch keine Bewertungen
- Module-2 Complete NotesDokument31 SeitenModule-2 Complete NotesManjuanthNoch keine Bewertungen
- 2012 Spring MidtermDokument6 Seiten2012 Spring Midtermjust todaystalkNoch keine Bewertungen
- 20EC3352 LAB EXPERIMENTS OldDokument47 Seiten20EC3352 LAB EXPERIMENTS Oldswathi kesanaNoch keine Bewertungen
- Assignment 2Dokument29 SeitenAssignment 2vidhya sNoch keine Bewertungen
- MPMC Unit IV BiherDokument22 SeitenMPMC Unit IV BiherSankarsh ReddyNoch keine Bewertungen
- Last Experiment MicroDokument11 SeitenLast Experiment MicroRuth DVNoch keine Bewertungen
- Tutorials On 8051Dokument10 SeitenTutorials On 8051DuoDrenchNoch keine Bewertungen
- (123doc) Microcontroller 8051 Assembly LanguageDokument40 Seiten(123doc) Microcontroller 8051 Assembly LanguagePhan Vũ KiệtNoch keine Bewertungen
- WINSEM2023-24 BECE204L TH VL2023240505489 2024-01-10 Reference-Material-IDokument24 SeitenWINSEM2023-24 BECE204L TH VL2023240505489 2024-01-10 Reference-Material-IpratyakshswamiNoch keine Bewertungen
- Basic Micro Controller ProgramsDokument16 SeitenBasic Micro Controller ProgramsMechatronics MGITNoch keine Bewertungen
- 15BMD0020 - 1Dokument14 Seiten15BMD0020 - 1Broklen Hawk Jr.Noch keine Bewertungen
- Lab 2 7SD InterfacingDokument7 SeitenLab 2 7SD InterfacingAshik AhmedNoch keine Bewertungen
- Task - 1 Basic Assembly Language ProgramsDokument21 SeitenTask - 1 Basic Assembly Language ProgramsprajjwalNoch keine Bewertungen
- Microcontroller and Risc ArchitectureDokument18 SeitenMicrocontroller and Risc ArchitecturesridharanchandranNoch keine Bewertungen
- Unit - IV 1. What Is Mean by Microcontroller?: Internal Blocks of MicrocontrollerDokument6 SeitenUnit - IV 1. What Is Mean by Microcontroller?: Internal Blocks of MicrocontrollerkesavantNoch keine Bewertungen
- MicrocontrollerDokument13 SeitenMicrocontrollerClips HUBNoch keine Bewertungen
- Microprocessors: Familiarization With The Edsim51 Simulator and The 8051 Instruction SetDokument11 SeitenMicroprocessors: Familiarization With The Edsim51 Simulator and The 8051 Instruction SetDioselle CastilloNoch keine Bewertungen
- Use 8051 To Switch On and Off An LED Using A Toggle SwitchDokument20 SeitenUse 8051 To Switch On and Off An LED Using A Toggle SwitchBaijayanti DasNoch keine Bewertungen
- CPE108L E01 Experiment2Dokument14 SeitenCPE108L E01 Experiment2Dioselle CastilloNoch keine Bewertungen
- Assembly Language ProgramsDokument33 SeitenAssembly Language ProgramsPiyush chaudhariNoch keine Bewertungen
- 19bec1025 - Ece3003 - Lab - 8Dokument7 Seiten19bec1025 - Ece3003 - Lab - 8avnm hematejaNoch keine Bewertungen
- 8051 Assembly Language ProgrammingDokument35 Seiten8051 Assembly Language ProgrammingavmapNoch keine Bewertungen
- Home Assignment (Lockdown Period) IAP-2034: Utpal SarmaDokument5 SeitenHome Assignment (Lockdown Period) IAP-2034: Utpal SarmaUtpal SarmaNoch keine Bewertungen
- Assembler Language - 8051powerpoint PresentationDokument56 SeitenAssembler Language - 8051powerpoint PresentationtauseeeeeeeeNoch keine Bewertungen
- Nov 2014 - d2Dokument3 SeitenNov 2014 - d2Vasu VasuNoch keine Bewertungen
- V Semester B. Tech (Electrical & Electronics Engineering) End Semester Examinations, November 2019Dokument3 SeitenV Semester B. Tech (Electrical & Electronics Engineering) End Semester Examinations, November 2019DuoDrenchNoch keine Bewertungen
- Ec522 8051 05Dokument52 SeitenEc522 8051 05Anurag BansalNoch keine Bewertungen
- 8085 Microprocessor MCQS: August 30, 2017Dokument3 Seiten8085 Microprocessor MCQS: August 30, 2017JohnNoch keine Bewertungen
- Risks and Mitigation of Developing UAV ApplicationsDokument11 SeitenRisks and Mitigation of Developing UAV ApplicationsJiaJian PangNoch keine Bewertungen
- Expertise & ManpowerDokument3 SeitenExpertise & ManpowerJiaJian PangNoch keine Bewertungen
- Financial Analysis For Automated VehicleDokument5 SeitenFinancial Analysis For Automated VehicleJiaJian PangNoch keine Bewertungen
- Critical Path & Processes in The ProjectDokument4 SeitenCritical Path & Processes in The ProjectJiaJian PangNoch keine Bewertungen
- Opportunity Cost For Automated VehicleDokument3 SeitenOpportunity Cost For Automated VehicleJiaJian PangNoch keine Bewertungen
- Quality PresentationDokument15 SeitenQuality PresentationJiaJian PangNoch keine Bewertungen
- Expertise & ManpowerDokument3 SeitenExpertise & ManpowerJiaJian PangNoch keine Bewertungen
- Image CountingDokument6 SeitenImage CountingJiaJian PangNoch keine Bewertungen
- New Intro, Extra Info, SummaryDokument6 SeitenNew Intro, Extra Info, SummaryJiaJian PangNoch keine Bewertungen
- Basic Electrical Technology: Chris OhDokument31 SeitenBasic Electrical Technology: Chris OhJohn RajNoch keine Bewertungen
- Density SeparationDokument26 SeitenDensity SeparationJiaJian PangNoch keine Bewertungen
- Case Study 1Dokument11 SeitenCase Study 1JiaJian PangNoch keine Bewertungen
- Article Dry Vs Wet SievingDokument31 SeitenArticle Dry Vs Wet SievingJiaJian PangNoch keine Bewertungen
- Epi CyclicDokument10 SeitenEpi Cyclicpure14Noch keine Bewertungen
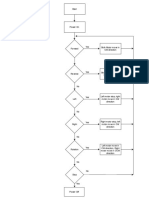
- Flow ChartDokument1 SeiteFlow ChartJiaJian PangNoch keine Bewertungen
- Mohd Effi MohjeeDokument37 SeitenMohd Effi MohjeeSyahzanan Haunan FatharaniNoch keine Bewertungen
- 4 Aji Sieving Machine 2Dokument12 Seiten4 Aji Sieving Machine 2JiaJian PangNoch keine Bewertungen
- LabDokument6 SeitenLabJiaJian PangNoch keine Bewertungen
- Chapter 3 Opcode MapDokument1 SeiteChapter 3 Opcode MapNorsyazwani Abdul RashidNoch keine Bewertungen
- 1 Epicyclic Gear Train ExperimentDokument6 Seiten1 Epicyclic Gear Train Experimentshuyun88100% (6)
- 2.contract LawDokument28 Seiten2.contract LawShafiq ShajaNoch keine Bewertungen
- Flow ChartDokument1 SeiteFlow ChartJiaJian PangNoch keine Bewertungen
- The Mazing Race: AssignmentDokument36 SeitenThe Mazing Race: AssignmentJiaJian PangNoch keine Bewertungen
- Customer SurveyDokument14 SeitenCustomer SurveyJiaJian PangNoch keine Bewertungen
- Falculty: Faculty FOB Fist FET FOL NO. 13 14 10 13 Percentage,% 26 28 20 26Dokument3 SeitenFalculty: Faculty FOB Fist FET FOL NO. 13 14 10 13 Percentage,% 26 28 20 26JiaJian PangNoch keine Bewertungen
- Convert Degree To RadianDokument8 SeitenConvert Degree To RadianJiaJian PangNoch keine Bewertungen
- Tutorial ME26654Dokument1 SeiteTutorial ME26654G00GLRNoch keine Bewertungen
- Faculty FOB Fist FET FOL NO. 13 14 10 13 26 28 20 26 Percenta Ge,%Dokument7 SeitenFaculty FOB Fist FET FOL NO. 13 14 10 13 26 28 20 26 Percenta Ge,%JiaJian PangNoch keine Bewertungen
- Authentication GuideDokument60 SeitenAuthentication GuideCon CacNoch keine Bewertungen
- Final ThesisDokument14 SeitenFinal ThesisJyll GellecanaoNoch keine Bewertungen
- Cooling Water Pump GearboxDokument20 SeitenCooling Water Pump GearboxAri BinukoNoch keine Bewertungen
- Coherent LMC 2016-2017 CatalogDokument140 SeitenCoherent LMC 2016-2017 CatalogPopescu Viorel-MihaiNoch keine Bewertungen
- Taniya Rawat: ObjectiveDokument1 SeiteTaniya Rawat: Objectiveanuj sharmaNoch keine Bewertungen
- 290-01 (Industrial Control Trainer)Dokument1 Seite290-01 (Industrial Control Trainer)HadiWaluyo100% (1)
- GRT8 M Instruction ManualDokument2 SeitenGRT8 M Instruction ManualJosé Antonio Vega SimónNoch keine Bewertungen
- Aw2.9bk6 12ax1 ManualDokument63 SeitenAw2.9bk6 12ax1 ManualjassimNoch keine Bewertungen
- Iphone 4s Case Design GuidelinesDokument16 SeitenIphone 4s Case Design GuidelinesJayoshomeNoch keine Bewertungen
- PH 1Dokument22 SeitenPH 1Ricardo VelazquezNoch keine Bewertungen
- Pro 5632Dokument9 SeitenPro 5632Phat HoangNoch keine Bewertungen
- B230/B237/D042 Service ManualDokument1.312 SeitenB230/B237/D042 Service ManualSutan HarrymanNoch keine Bewertungen
- Drive ActiveHybrid - V.4 GA8P70HZDokument15 SeitenDrive ActiveHybrid - V.4 GA8P70HZTimur GorgievNoch keine Bewertungen
- ABC Functional Requirements Doc SampleDokument57 SeitenABC Functional Requirements Doc SampleSharang Bhasin100% (1)
- Without: Fassi and Innovation: Fassi'S Genetic Code The Key Word Is Flexibility Her Majesty THE F1950Dokument44 SeitenWithout: Fassi and Innovation: Fassi'S Genetic Code The Key Word Is Flexibility Her Majesty THE F1950Leon WongNoch keine Bewertungen
- Praktikum Modul 7 IPv4 Dan IPv6Dokument20 SeitenPraktikum Modul 7 IPv4 Dan IPv6Joshia Agrisa Anrhiely LutherNoch keine Bewertungen
- Activity Refine Your Time EstimatesDokument54 SeitenActivity Refine Your Time EstimatesTAgore Ravi Teja100% (4)
- 2023 Design BriefingDokument24 Seiten2023 Design Briefingpatcharamai.chNoch keine Bewertungen
- Vectortechtex I-Series: Cutting Quality & PerformanceDokument2 SeitenVectortechtex I-Series: Cutting Quality & Performanceperro perezNoch keine Bewertungen
- Manual VsDokument44 SeitenManual VsMax WilsonNoch keine Bewertungen
- Iraudamp 16Dokument26 SeitenIraudamp 16Carlos AlvarezNoch keine Bewertungen
- V Ug Type ListDokument3 SeitenV Ug Type ListDanang BiantaraNoch keine Bewertungen
- SCE-CNF-VAS VAS Configuration Document V1 1Dokument11 SeitenSCE-CNF-VAS VAS Configuration Document V1 1fran0% (1)
- Proposed Research Titles: ObjectivesDokument4 SeitenProposed Research Titles: ObjectivesApril Danica BiernezaNoch keine Bewertungen
- Manufacturing Capabilities in Microsoft Dynamics NAVDokument3 SeitenManufacturing Capabilities in Microsoft Dynamics NAVAtanacia Ilagan100% (1)
- Search: Skip To Content Using Gmail With Screen ReadersDokument11 SeitenSearch: Skip To Content Using Gmail With Screen ReadersKavitha100% (1)
- Bharat Sanchar Nigam Limited: Office of The Executive Engineer (Civil) BSNL Civil Division, Imphal - 795001, ManipurDokument47 SeitenBharat Sanchar Nigam Limited: Office of The Executive Engineer (Civil) BSNL Civil Division, Imphal - 795001, Manipurvivekananda sharmaNoch keine Bewertungen
- DROPS - Reliable Securing Rev 04Dokument67 SeitenDROPS - Reliable Securing Rev 04Chris EasterNoch keine Bewertungen
- Release Note Ver 1.0Dokument2 SeitenRelease Note Ver 1.0Nkenchor OsemekeNoch keine Bewertungen
- CH09 Maneuver Support (FY22) 12 Oct21Dokument114 SeitenCH09 Maneuver Support (FY22) 12 Oct21geraldwolford1100% (1)