Das könnte Ihnen auch gefallen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Cleaness of Fuel System ComponentsDokument2 SeitenCleaness of Fuel System ComponentsbejoythomasNoch keine Bewertungen
- Wa320-5 M 50051up 0311 PDFDokument321 SeitenWa320-5 M 50051up 0311 PDFCarlos GomezNoch keine Bewertungen
- Bubble Point Pressure DeterminationDokument5 SeitenBubble Point Pressure DeterminationjeedNoch keine Bewertungen
- Adoc - Tips - Analisa Prestasi Electrical Submersible Pump Di SuDokument6 SeitenAdoc - Tips - Analisa Prestasi Electrical Submersible Pump Di Suadi SaputraNoch keine Bewertungen
- 2017 Catalysis PDFDokument68 Seiten2017 Catalysis PDFnurlianaNoch keine Bewertungen
- Sop For Ash Slurry Pump (r1)Dokument6 SeitenSop For Ash Slurry Pump (r1)SonratNoch keine Bewertungen
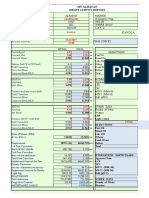
- 04 Draft Survey 15.12.2017 0600Dokument8 Seiten04 Draft Survey 15.12.2017 0600Scarlat IuliuNoch keine Bewertungen
- BUDGET FY2012-13: AutomobilesDokument3 SeitenBUDGET FY2012-13: AutomobilesDhanush RaoNoch keine Bewertungen
- Planning & Preparation of Dry Dock As A Chief Engineer: PreparationsDokument3 SeitenPlanning & Preparation of Dry Dock As A Chief Engineer: PreparationsThusitha Dalpathadu100% (3)
- Agosto Valorizacion MaquinariaDokument36 SeitenAgosto Valorizacion MaquinariaJHONATANNoch keine Bewertungen
- CY100 Engineering Chemistry Syllabus 2016Dokument2 SeitenCY100 Engineering Chemistry Syllabus 2016Siju N. AntonyNoch keine Bewertungen
- IS 15301: Installation and Maintenance of Fire Fighting Pumps - Code of PracticeDokument13 SeitenIS 15301: Installation and Maintenance of Fire Fighting Pumps - Code of Practiceashwani100% (1)
- The Official Newsletter of The Naval Airship AssociationDokument36 SeitenThe Official Newsletter of The Naval Airship Associationgustavojorge12Noch keine Bewertungen
- Risk Assessment, Aluminum Ladders and Step LaddersDokument2 SeitenRisk Assessment, Aluminum Ladders and Step LaddersMohamed FaroukNoch keine Bewertungen
- Einstelldaten Kubota 07-Serie (EU Stage IIIA, EPA Int - Tier 4)Dokument20 SeitenEinstelldaten Kubota 07-Serie (EU Stage IIIA, EPA Int - Tier 4)Juan Carlos Gallego100% (1)
- Daedong Marine Tec Inc. 2012 CATALOGUEDokument8 SeitenDaedong Marine Tec Inc. 2012 CATALOGUEhaphong30000% (1)
- Reviewer 5Dokument59 SeitenReviewer 5KleberNoch keine Bewertungen
- SAKAI SW800850900 Ops Maint Instructions No. 3498 35550 2Dokument81 SeitenSAKAI SW800850900 Ops Maint Instructions No. 3498 35550 2TUNAS ADITYA PUTRANoch keine Bewertungen
- Project in EE 311.1 Wired RC CarDokument8 SeitenProject in EE 311.1 Wired RC CarBryan Joshua SalvidarNoch keine Bewertungen
- 8,000 RPM APU Size To 30,000 RPM Miniature, Aerospace ApplicationsDokument9 Seiten8,000 RPM APU Size To 30,000 RPM Miniature, Aerospace Applicationskanteron6443Noch keine Bewertungen
- Ebrahim Soleimani: "Coning'' in Advanced Production Engineering Course As Course ProjectDokument2 SeitenEbrahim Soleimani: "Coning'' in Advanced Production Engineering Course As Course ProjectEbrahim SoleimaniNoch keine Bewertungen
- TM 9-6115-484-14 Mep-Pu-810a/b Part 1Dokument161 SeitenTM 9-6115-484-14 Mep-Pu-810a/b Part 1Advocate100% (3)
- Model m75 Service ManualDokument40 SeitenModel m75 Service ManualMuhamad Sharif Bin ZainudinNoch keine Bewertungen
- Design ReportDokument193 SeitenDesign ReportNhut Nguyen100% (1)
- Farzad 2007Dokument34 SeitenFarzad 2007ayamNoch keine Bewertungen
- Opel Corsa C Oil Filter ReplacementDokument12 SeitenOpel Corsa C Oil Filter ReplacementAndrásBakosNoch keine Bewertungen
- Toyota NR Series EnginesDokument34 SeitenToyota NR Series Enginesmaty_11_gti100% (1)
- Sliding Shoe Pump - SingleDokument4 SeitenSliding Shoe Pump - SingleRicardo DavidNoch keine Bewertungen
- Truck Tire Service Manual 062011 MichelinDokument154 SeitenTruck Tire Service Manual 062011 MichelinArturo Zavala UrquidesNoch keine Bewertungen
- Save Water Powerpoint Presentation Teacher Notes PDFDokument11 SeitenSave Water Powerpoint Presentation Teacher Notes PDFsachlodaya_991833336Noch keine Bewertungen