Das könnte Ihnen auch gefallen
- Analysis and Design of Flat Slabs Using Various Codes: M.Anitha B.Q.Rahman JJ .VijayDokument53 SeitenAnalysis and Design of Flat Slabs Using Various Codes: M.Anitha B.Q.Rahman JJ .VijayKrishen ChaitanyaNoch keine Bewertungen
- ACI Code List PDFDokument5 SeitenACI Code List PDFAnonymous dWa1xtpKmf50% (4)
- Watertank GS PDFDokument24 SeitenWatertank GS PDFManoj RautNoch keine Bewertungen
- Industrial FlooringDokument6 SeitenIndustrial FlooringVinay KumarNoch keine Bewertungen
- Rate Analysis - BOOKDokument367 SeitenRate Analysis - BOOKVinay KumarNoch keine Bewertungen
- 11 - Chapter 3 PDFDokument28 Seiten11 - Chapter 3 PDFRainielNoch keine Bewertungen
- Lecture 4 SF and BM Full PageDokument77 SeitenLecture 4 SF and BM Full Pageapi-368340382100% (1)
- RCC Grade Slab Design CalculationsDokument16 SeitenRCC Grade Slab Design CalculationsVinay Kumar100% (3)
- Young Scientist and Sports PDFDokument171 SeitenYoung Scientist and Sports PDFVinay KumarNoch keine Bewertungen
- BoConcept Design FurnitureDokument188 SeitenBoConcept Design FurniturecmltangNoch keine Bewertungen
- Seismic Isolation Project For Mitchell HallDokument122 SeitenSeismic Isolation Project For Mitchell HallVinay KumarNoch keine Bewertungen
- Weakly Nonlinear Things Oscillators PDFDokument18 SeitenWeakly Nonlinear Things Oscillators PDFVinay KumarNoch keine Bewertungen
- Modeling and Analysis of Vertically Irregular Tall RC Structures under Lateral LoadsDokument6 SeitenModeling and Analysis of Vertically Irregular Tall RC Structures under Lateral LoadsVinay KumarNoch keine Bewertungen
- 3dhouse BBBBBBDokument6 Seiten3dhouse BBBBBBTunggul SagalaNoch keine Bewertungen
- Seismic Design For Buildings PDFDokument482 SeitenSeismic Design For Buildings PDFVinay KumarNoch keine Bewertungen
- SAP 2000 Frame Analysis TutorialDokument9 SeitenSAP 2000 Frame Analysis TutorialAnonymous EhjsAEyHrBNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- Mnmjec - Ec6303 Signals & SystemsDokument25 SeitenMnmjec - Ec6303 Signals & SystemsSonuNoch keine Bewertungen
- ABB Protection CurvesDokument60 SeitenABB Protection Curvesnabil160874Noch keine Bewertungen
- Calculus SolutionsDokument1.819 SeitenCalculus SolutionsReeze Vreena TamarayNoch keine Bewertungen
- Circle-3Dokument62 SeitenCircle-3Satwik MishraNoch keine Bewertungen
- FactorisingExercises132 PDFDokument4 SeitenFactorisingExercises132 PDFБ. ЖавхланNoch keine Bewertungen
- Model Predictive Control Report by Ronak JainDokument9 SeitenModel Predictive Control Report by Ronak JainRonak Jain100% (2)
- Solving Quartic EquationsDokument5 SeitenSolving Quartic Equationsed9428Noch keine Bewertungen
- Algebra Graph Linear Slope Intercept Find Equation 001.1579267157Dokument2 SeitenAlgebra Graph Linear Slope Intercept Find Equation 001.1579267157contactsulaiman1Noch keine Bewertungen
- Section 1.7 Combinations of Functions: Composite FunctionsDokument28 SeitenSection 1.7 Combinations of Functions: Composite FunctionsdavogezuNoch keine Bewertungen
- Mathematics Assignment Submission Schedule and Chapter DeadlinesDokument55 SeitenMathematics Assignment Submission Schedule and Chapter DeadlinesAasthaNoch keine Bewertungen
- Surfaces in Classical Geometries: Gary R. Jensen Emilio Musso Lorenzo NicolodiDokument576 SeitenSurfaces in Classical Geometries: Gary R. Jensen Emilio Musso Lorenzo Nicolodivguardiano100% (1)
- Ilka Agricola, Thomas Friedrich Global Analysis Differential Forms in Analysis, Geometry, and Physics Graduate Studies in Mathematics, V. 52 PDFDokument359 SeitenIlka Agricola, Thomas Friedrich Global Analysis Differential Forms in Analysis, Geometry, and Physics Graduate Studies in Mathematics, V. 52 PDFHenrique Zangaro100% (1)
- abdi-PLSC and PLSR2012Dokument31 Seitenabdi-PLSC and PLSR2012Milton CocaNoch keine Bewertungen
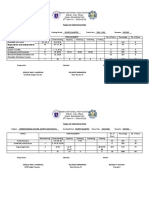
- Tos FinalDokument2 SeitenTos FinalGenelle Mae MadrigalNoch keine Bewertungen
- Solution Manual For Applied Partial Differential Equations With Fourier Series and Boundary Value Problems 5 e Richard HabermanDokument36 SeitenSolution Manual For Applied Partial Differential Equations With Fourier Series and Boundary Value Problems 5 e Richard Habermandormygallego8ogln6100% (45)
- Hill CipherDokument22 SeitenHill Cipherpavan yadavNoch keine Bewertungen
- MIT2 080JF13 Lecture2 PDFDokument26 SeitenMIT2 080JF13 Lecture2 PDFAbhilashJanaNoch keine Bewertungen
- Hanani Abd Wahab BDA 3073 16 July 2008Dokument34 SeitenHanani Abd Wahab BDA 3073 16 July 2008Hafzal GaniNoch keine Bewertungen
- Solving Numerical ProblemsDokument15 SeitenSolving Numerical ProblemsVishal Gupta0% (1)
- State and State SpaceDokument76 SeitenState and State Spacesohaib389892Noch keine Bewertungen
- Acceleration Methods: Aitken's MethodDokument5 SeitenAcceleration Methods: Aitken's MethodOubelaid AdelNoch keine Bewertungen
- MEEM 3700 Mechanical VibrationsDokument6 SeitenMEEM 3700 Mechanical VibrationsJohn Larry CorpuzNoch keine Bewertungen
- Outline: - Principal Stresses - Mohr's Circle in 3D - Strain Tensor - Principal StrainsDokument14 SeitenOutline: - Principal Stresses - Mohr's Circle in 3D - Strain Tensor - Principal StrainsDrMohamed MansourNoch keine Bewertungen
- Differentiation and Integration FormulasDokument3 SeitenDifferentiation and Integration FormulasAbell AlcantaraNoch keine Bewertungen
- Operations Research AssignmentDokument12 SeitenOperations Research AssignmentRanajit RoyNoch keine Bewertungen
- Exponent Lifting Sol 2Dokument2 SeitenExponent Lifting Sol 2johnsonNoch keine Bewertungen
- Incidence matrix rank and minors for graphsDokument14 SeitenIncidence matrix rank and minors for graphsEmbellyNoch keine Bewertungen
- Unit I Static Electric Fields: Electromagnetic FieldDokument31 SeitenUnit I Static Electric Fields: Electromagnetic FieldrahumanNoch keine Bewertungen
- Project - Function Family AlbumDokument3 SeitenProject - Function Family AlbumMegan Golding50% (6)
- David Harte Multifractals Theory and ApplicationsDokument248 SeitenDavid Harte Multifractals Theory and ApplicationsR.A.M100% (1)