Das könnte Ihnen auch gefallen
- Planificación en STRIPS/PDDLDokument17 SeitenPlanificación en STRIPS/PDDLFernandoQuisaguanoNoch keine Bewertungen
- Tarea1 Unidad3 Quisaguano Alvarez 2696Dokument16 SeitenTarea1 Unidad3 Quisaguano Alvarez 2696FernandoQuisaguanoNoch keine Bewertungen
- Vision Por Computador - Tema 1Dokument41 SeitenVision Por Computador - Tema 1Sebastián SandovalNoch keine Bewertungen
- Tarea2 Unidad3 Aguirre Alvarez Quisaguano2696Dokument12 SeitenTarea2 Unidad3 Aguirre Alvarez Quisaguano2696FernandoQuisaguanoNoch keine Bewertungen
- Lab3 3825 Alvarez Quisaguano PresentacionDokument16 SeitenLab3 3825 Alvarez Quisaguano PresentacionFernandoQuisaguanoNoch keine Bewertungen
- AA Actividad2 QuisaguanoDokument12 SeitenAA Actividad2 QuisaguanoFernandoQuisaguanoNoch keine Bewertungen
- 1 - Presentación ClaseDokument6 Seiten1 - Presentación ClaseKatty Aguilar ZambranoNoch keine Bewertungen
- Vision Por Computador - Tema 3Dokument31 SeitenVision Por Computador - Tema 3Sebastián SandovalNoch keine Bewertungen
- Ejercicios de MatlabDokument17 SeitenEjercicios de MatlabFernandoQuisaguanoNoch keine Bewertungen
- SEGUNDA - CLASE MicroprocesadoresDokument9 SeitenSEGUNDA - CLASE MicroprocesadoresFernandoQuisaguanoNoch keine Bewertungen
- Control Digital Deber Parcial 1Dokument4 SeitenControl Digital Deber Parcial 1FernandoQuisaguanoNoch keine Bewertungen
- DEBER No 1.1 - 1 PDFDokument2 SeitenDEBER No 1.1 - 1 PDFJoseph BauerNoch keine Bewertungen
- 2 Diagramas P Id PDFDokument43 Seiten2 Diagramas P Id PDFFreddy YugchaNoch keine Bewertungen
- Guias y Trabajos Preparatorios 1Dokument2 SeitenGuias y Trabajos Preparatorios 1FernandoQuisaguanoNoch keine Bewertungen
- Automatizacion en La IndustriaDokument31 SeitenAutomatizacion en La IndustriaDarwinj90Noch keine Bewertungen
- Primera Clase MicroprocesadoresDokument44 SeitenPrimera Clase MicroprocesadoresFernandoQuisaguanoNoch keine Bewertungen
- Guias y Trabajos Preparatorios 3Dokument2 SeitenGuias y Trabajos Preparatorios 3FernandoQuisaguanoNoch keine Bewertungen
- Introducción A HMI (Interfaz Hombre Máquina)Dokument5 SeitenIntroducción A HMI (Interfaz Hombre Máquina)Teckelino100% (1)
- SGCD FormularioIdentificaciónPersonagraduaciónDokument1 SeiteSGCD FormularioIdentificaciónPersonagraduaciónFernandoQuisaguanoNoch keine Bewertungen
- Guias y Trabajos Preparatorios 2Dokument2 SeitenGuias y Trabajos Preparatorios 2FernandoQuisaguanoNoch keine Bewertungen
- GrafcetDokument44 SeitenGrafcetmartining23100% (2)
- Problemas Selectividad Soluciones NeumaticaDokument14 SeitenProblemas Selectividad Soluciones Neumaticakoala6969100% (1)
- P3. PLC ConceptosDokument34 SeitenP3. PLC ConceptosFernandoQuisaguanoNoch keine Bewertungen
- Documentos para GRADO Pregrado 2016Dokument2 SeitenDocumentos para GRADO Pregrado 2016FernandoQuisaguanoNoch keine Bewertungen
- Automatizacion en La IndustriaDokument31 SeitenAutomatizacion en La IndustriaDarwinj90Noch keine Bewertungen
- Tarea11 Industria 2681 PLC Equipo 2Dokument1 SeiteTarea11 Industria 2681 PLC Equipo 2FernandoQuisaguanoNoch keine Bewertungen
- Guiapractica1 1 PDFDokument3 SeitenGuiapractica1 1 PDFFernandoQuisaguanoNoch keine Bewertungen
- MONICA Curriculo-Educacion-Inicial PDFDokument37 SeitenMONICA Curriculo-Educacion-Inicial PDFElvis Honores RiveraNoch keine Bewertungen
- Contador de Programa Del Microprocesador Z80Dokument10 SeitenContador de Programa Del Microprocesador Z80FernandoQuisaguano0% (1)
- Códigos G TornoDokument30 SeitenCódigos G TornoPablo Sarzosa67% (6)
- Fallo IglesiasDokument19 SeitenFallo IglesiasNicoGomezNoch keine Bewertungen
- Clonacion de ParticionesDokument6 SeitenClonacion de ParticionesEstiver Jesus EstebanNoch keine Bewertungen
- Febrero Planeacion AdaptaciónDokument52 SeitenFebrero Planeacion AdaptaciónNathalyNoch keine Bewertungen
- Cotizacion #2556 - 2023 - FRG Farms S.A.C. PDFDokument1 SeiteCotizacion #2556 - 2023 - FRG Farms S.A.C. PDFJorge Alexander Regalado MacedoNoch keine Bewertungen
- Evaluación de Primer Periodo Geometría NovenoDokument3 SeitenEvaluación de Primer Periodo Geometría NovenoAdriana Villa Uribe100% (1)
- Martes 26 de Marzo - Sesion Tutoria Me Conozco y Conozco A Mis CompañerosDokument7 SeitenMartes 26 de Marzo - Sesion Tutoria Me Conozco y Conozco A Mis CompañerosMARCIA ANTONIETA IBARRA GANOZANoch keine Bewertungen
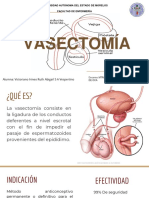
- VASECTOMÍADokument9 SeitenVASECTOMÍARuth Abigail Victoriano IrineoNoch keine Bewertungen
- Plan Gobierno Comas 2019 2022Dokument118 SeitenPlan Gobierno Comas 2019 2022manolosailes100% (1)
- Caso HyundaiDokument2 SeitenCaso HyundaiMarco ToroNoch keine Bewertungen
- CRM Pilotos y SobrecargosDokument57 SeitenCRM Pilotos y SobrecargosDavid Obarayekun100% (1)
- Unidad 6 Lab Salud Colectiva.Dokument8 SeitenUnidad 6 Lab Salud Colectiva.Maireni fortunaNoch keine Bewertungen
- LisztDokument5 SeitenLisztAndrés MartínezNoch keine Bewertungen
- Jose A. Benitez - EnsayoDokument2 SeitenJose A. Benitez - EnsayoJose Antonio Benitez PedrozoNoch keine Bewertungen
- Prueba Excel y AccessDokument4 SeitenPrueba Excel y AccessYeimy EspitiaNoch keine Bewertungen
- Procedimiento TrompoDokument14 SeitenProcedimiento TrompoPedro VazanNoch keine Bewertungen
- S04.s2 - Soluc. en Word Semana 4 Caf 3Dokument10 SeitenS04.s2 - Soluc. en Word Semana 4 Caf 3Melany ScarletNoch keine Bewertungen
- Libro de Estilo Del Trabajo AcademicoDokument10 SeitenLibro de Estilo Del Trabajo AcademicoEdwin ReyesNoch keine Bewertungen
- Constitución Federal para Los Estados de Venezuela de 1811 - IX - WikisourceDokument6 SeitenConstitución Federal para Los Estados de Venezuela de 1811 - IX - WikisourceRuth MaldonadoNoch keine Bewertungen
- Hoja de Seguridad Racumin PolvoDokument5 SeitenHoja de Seguridad Racumin PolvoMargot Gutierrez vegaNoch keine Bewertungen
- Carcinoma Mamario - Mip AlmeidaDokument60 SeitenCarcinoma Mamario - Mip AlmeidaDANIEL ALEJANDRONoch keine Bewertungen
- Bocina Sectorial Plano EDokument22 SeitenBocina Sectorial Plano ELuis García TíscarNoch keine Bewertungen
- NivelaciónDokument20 SeitenNivelaciónJimmy Alberto Rocha QuirogaNoch keine Bewertungen
- Examen - Sena - Tecnología en Mantenimiento de Equipos Biomédicos - VIIIDokument27 SeitenExamen - Sena - Tecnología en Mantenimiento de Equipos Biomédicos - VIIIGineth castellanosNoch keine Bewertungen
- Liquido de FrenosDokument15 SeitenLiquido de FrenosRicardo AltamiranoNoch keine Bewertungen
- Hierba Del ClavoDokument2 SeitenHierba Del ClavoGentil GoyimwitzNoch keine Bewertungen
- SolubilidadDokument6 SeitenSolubilidadalexpaniagua77060884Noch keine Bewertungen
- Evaluacion Formativa en EbrDokument29 SeitenEvaluacion Formativa en EbrLuliNoch keine Bewertungen
- Planteamiento Del Problema Licor ArtesanalDokument3 SeitenPlanteamiento Del Problema Licor ArtesanalFranklin Uchiha100% (4)
- Guia N°4 SocialesDokument6 SeitenGuia N°4 SocialesSamuel Montoya ZapataNoch keine Bewertungen