Das könnte Ihnen auch gefallen
- Análisis Dinamico de Fuerzas en Los Mecanismos PDFDokument19 SeitenAnálisis Dinamico de Fuerzas en Los Mecanismos PDFGiovanni CruzNoch keine Bewertungen
- Instrumentacion Ley de OhmDokument11 SeitenInstrumentacion Ley de OhmLucíaNoch keine Bewertungen
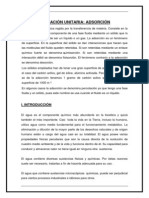
- Procesos de Adsorción ExposiciónDokument18 SeitenProcesos de Adsorción ExposiciónVictorCelyNoch keine Bewertungen
- El Transistor Bipolar Principios y Aplicacione1Dokument11 SeitenEl Transistor Bipolar Principios y Aplicacione1Paco CruzNoch keine Bewertungen
- Proyecto LevaDokument11 SeitenProyecto LevaAri Jair Olguin AlvarezNoch keine Bewertungen
- Seleccion de TransformadorDokument5 SeitenSeleccion de TransformadorLuis SanchezNoch keine Bewertungen
- 01 IntroduccionDokument31 Seiten01 IntroduccionBraython Gutierrez GrandaNoch keine Bewertungen
- DAFI324 03 Ley de Ohm 1 PDFDokument4 SeitenDAFI324 03 Ley de Ohm 1 PDFEnrique Alberto Mamani PercaNoch keine Bewertungen
- La IngenieriaDokument4 SeitenLa IngenieriaAlfredo CastilloNoch keine Bewertungen
- Analisis Del ProcesoDokument18 SeitenAnalisis Del ProcesoAlbina DuranNoch keine Bewertungen
- Formulario de SpicrometriaDokument29 SeitenFormulario de Spicrometriaskrain15Noch keine Bewertungen
- Qué Es El Valor Presente NetoDokument2 SeitenQué Es El Valor Presente Netocunil_antonioNoch keine Bewertungen
- Análisis de Causa-Efecto Del Problema Del Cultivo Del CacaoDokument9 SeitenAnálisis de Causa-Efecto Del Problema Del Cultivo Del CacaoElias Ponce de LeonNoch keine Bewertungen
- AdsorcionDokument14 SeitenAdsorcionYovineitor Juan Pablo IINoch keine Bewertungen
- Investigaciòn de Mercado - Inca SumacDokument33 SeitenInvestigaciòn de Mercado - Inca SumacFernando RomeroNoch keine Bewertungen
- Triptico If-ElseDokument2 SeitenTriptico If-ElseOscar Martinez Etrusco0% (1)
- Amplificadore OperacionalesDokument47 SeitenAmplificadore OperacionalesAlan GonzalezNoch keine Bewertungen
- 718772865.carta PsicrométricaDokument4 Seiten718772865.carta PsicrométricaAngela GarciaNoch keine Bewertungen
- Informe de Laboratorio Ley de OhmDokument4 SeitenInforme de Laboratorio Ley de OhmKaren PérezNoch keine Bewertungen
- Identidad y Peruanidad-Madre de DiosDokument13 SeitenIdentidad y Peruanidad-Madre de DiosOswaldo Chavez LopezNoch keine Bewertungen
- Plantilla NoelDokument47 SeitenPlantilla NoelCondori AlarconNoch keine Bewertungen
- Determinacion de La Conductividad Termica de Materiales Solidos PDFDokument10 SeitenDeterminacion de La Conductividad Termica de Materiales Solidos PDFnayraNoch keine Bewertungen
- C.H. San Lorenzo Ingenieria Del ProyectoDokument34 SeitenC.H. San Lorenzo Ingenieria Del ProyectoJOSE DANIEL ANGLAS PEREZNoch keine Bewertungen
- TransistorDokument13 SeitenTransistorJuan Yacila Alvarado100% (1)
- Lab Nº1 - Generación de Trayectorias - 2020 ParDokument4 SeitenLab Nº1 - Generación de Trayectorias - 2020 ParEnrique Villegas MedinaNoch keine Bewertungen
- Cinetica de Muerte ADokument21 SeitenCinetica de Muerte Aanon_15958247Noch keine Bewertungen
- Gestion de Riesgos en Proyectos de Ingenieria EnsayoDokument4 SeitenGestion de Riesgos en Proyectos de Ingenieria EnsayoŠtiveņ ŌrjûëlaNoch keine Bewertungen
- Mermelada de MangoDokument8 SeitenMermelada de MangoAnyelo MinierNoch keine Bewertungen
- LEON DEL SUR-comprimidoDokument55 SeitenLEON DEL SUR-comprimidoJovana Roque V.Noch keine Bewertungen
- Silabo Cad II 2021-ParDokument9 SeitenSilabo Cad II 2021-ParMarcelo NeiraNoch keine Bewertungen
- Historia Area C-1 PDFDokument113 SeitenHistoria Area C-1 PDFBrandon Arias CjunoNoch keine Bewertungen
- Determinación Del Tamaño de PlantaDokument11 SeitenDeterminación Del Tamaño de PlantaRicardo Alejandre PérezNoch keine Bewertungen
- Probsol2 PDFDokument4 SeitenProbsol2 PDFRene HzNoch keine Bewertungen
- Resistencia 3Dokument7 SeitenResistencia 3Edson ruben Olvea AlanocaNoch keine Bewertungen
- Temario Energía EólicaDokument2 SeitenTemario Energía EólicaJeancarlo VidelaNoch keine Bewertungen
- Conductividad Termica PDFDokument16 SeitenConductividad Termica PDFBeatriz BastidasNoch keine Bewertungen
- Balanza AnalíticaDokument5 SeitenBalanza AnalíticaFernanda DomínguezNoch keine Bewertungen
- Caso 1 Flujos de Caja (Formato)Dokument9 SeitenCaso 1 Flujos de Caja (Formato)Brayan SamuelNoch keine Bewertungen
- Destilacion Completa PeruDokument40 SeitenDestilacion Completa Peruthebest_22Noch keine Bewertungen
- Libro - Digital - Lineas de TransmisionDokument43 SeitenLibro - Digital - Lineas de TransmisionAlex VicenteNoch keine Bewertungen
- Informe Yogurt AgroindustrialDokument20 SeitenInforme Yogurt AgroindustrialRamiro ShevchenkoNoch keine Bewertungen
- Amplificadores OperacionalesDokument19 SeitenAmplificadores OperacionalesVictor IbarraNoch keine Bewertungen
- Barboza Carnero XimenaDokument198 SeitenBarboza Carnero Ximenacarmen rosa floresNoch keine Bewertungen
- Lineas de TransmisiónDokument28 SeitenLineas de Transmisiónhermis_merchánNoch keine Bewertungen
- 10 Diseño Regenerativo y FeaDokument44 Seiten10 Diseño Regenerativo y FeaMarcelo NeiraNoch keine Bewertungen
- PLAN DE NEGOCIO Yogurt de Mango 100Dokument11 SeitenPLAN DE NEGOCIO Yogurt de Mango 100Áurea Rojas SoriaNoch keine Bewertungen
- Guardia Re PDFDokument85 SeitenGuardia Re PDFHernando Martinez GarciaNoch keine Bewertungen
- Calculo de Potencia de La BombaDokument21 SeitenCalculo de Potencia de La BombaRhey Ronald G. AuccasioNoch keine Bewertungen
- Análisis de Objetos - Empacadora Al VacioDokument26 SeitenAnálisis de Objetos - Empacadora Al VaciomcarizaaNoch keine Bewertungen
- Guia Fisica MiscelaneaDokument1 SeiteGuia Fisica MiscelaneaPADILLA COTRINA MANUEL LORENZONoch keine Bewertungen
- Haccp de AsgalDokument58 SeitenHaccp de AsgalWilson SaireNoch keine Bewertungen
- Potencial de La Yuca - Grup 03Dokument24 SeitenPotencial de La Yuca - Grup 03Jorge Flores ParraNoch keine Bewertungen
- Calculo Electrico Linea de Transmisión Utn FrreDokument18 SeitenCalculo Electrico Linea de Transmisión Utn FrreLeonardo BarabasNoch keine Bewertungen
- Calculos y Diseño de Una Central HidroeléctricaDokument37 SeitenCalculos y Diseño de Una Central HidroeléctricaRonny Ali Ochoa YucraNoch keine Bewertungen
- Asistencia Excel 2021Dokument24 SeitenAsistencia Excel 2021rosNoch keine Bewertungen
- Trabajo de Bebidas Heladas de Investigacion de MercadoDokument26 SeitenTrabajo de Bebidas Heladas de Investigacion de MercadoRosalinda Lla Ci100% (1)
- Práctica 8 Inercia RotacionalDokument14 SeitenPráctica 8 Inercia RotacionalJuan ManuelNoch keine Bewertungen
- Laboratoio de Fisica Practica 10 Aglaya UrquietaDokument14 SeitenLaboratoio de Fisica Practica 10 Aglaya UrquietaAglaya Jhoselin Urquieta VelezNoch keine Bewertungen
- Preinforme RodaduraDokument3 SeitenPreinforme RodaduraEdinson Garcia DiazNoch keine Bewertungen
- S11.s02 - Material - Cinética de Los Cuerpos Rígidos-Momento de Inercia de Masa-1Dokument14 SeitenS11.s02 - Material - Cinética de Los Cuerpos Rígidos-Momento de Inercia de Masa-1José ParéNoch keine Bewertungen
- RNE Norma G.010 - G0.30Dokument22 SeitenRNE Norma G.010 - G0.30Eddy BerríosNoch keine Bewertungen
- Diseño de Mezclas para Un ConcretoDokument22 SeitenDiseño de Mezclas para Un ConcretoRodrigo MYNoch keine Bewertungen
- Unidad Iv - Sesion de Clase 01Dokument27 SeitenUnidad Iv - Sesion de Clase 01Rodrigo MYNoch keine Bewertungen
- 6.2. - Ecuacion de BernoulliDokument17 Seiten6.2. - Ecuacion de BernoulliRodrigo MYNoch keine Bewertungen
- Universidad Andina "Néstor Cáceres Velásquez": SilaboDokument6 SeitenUniversidad Andina "Néstor Cáceres Velásquez": SilaboJhon AquinoNoch keine Bewertungen
- Grup 7 CAPACIDADES Y FORTALEZAS PARA CREAR Y LIDERAR EL CAMBIODokument23 SeitenGrup 7 CAPACIDADES Y FORTALEZAS PARA CREAR Y LIDERAR EL CAMBIORodrigo MYNoch keine Bewertungen
- Mujer Embarazada en El Consul To RioDokument5 SeitenMujer Embarazada en El Consul To RiopactyNoch keine Bewertungen
- Teoria de ErroresDokument11 SeitenTeoria de ErroresRodrigo MYNoch keine Bewertungen
- Conceptos de Estadistica y Fuentes de InformacionDokument17 SeitenConceptos de Estadistica y Fuentes de InformacionRodrigo MYNoch keine Bewertungen
- MofDokument470 SeitenMofRodrigo MYNoch keine Bewertungen
- Conceptos de Estadistica y Fuentes de InformacionDokument17 SeitenConceptos de Estadistica y Fuentes de InformacionRodrigo MYNoch keine Bewertungen
- ABC Del Consultorio Dental 04.03.18Dokument141 SeitenABC Del Consultorio Dental 04.03.18Ivan Junior Castillo Valladares100% (1)
- 03 Formulas para Canales-UANCVDokument19 Seiten03 Formulas para Canales-UANCVRodrigo MYNoch keine Bewertungen
- Dialnet ManualBasicoDelTratamientoProtesicoParaOdontologos 660573Dokument68 SeitenDialnet ManualBasicoDelTratamientoProtesicoParaOdontologos 660573Thomaas MülleerNoch keine Bewertungen
- ResinasDokument2 SeitenResinasRodrigo MYNoch keine Bewertungen
- ResinasDokument2 SeitenResinasRodrigo MYNoch keine Bewertungen
- Mapa de Cantera PDFDokument1 SeiteMapa de Cantera PDFYermain Ramirez MachacaNoch keine Bewertungen
- Nco1-Anexo4-Bioseguridad en Odontologia Norma Tecnica MinsaDokument63 SeitenNco1-Anexo4-Bioseguridad en Odontologia Norma Tecnica MinsaColegio Odontológico del Perú100% (1)
- PDFDokument2 SeitenPDFRodrigo MYNoch keine Bewertungen
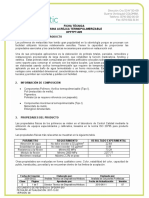
- AcrílicoDokument7 SeitenAcrílicoRodrigo MYNoch keine Bewertungen
- Nco1-Anexo4-Bioseguridad en Odontologia Norma Tecnica MinsaDokument63 SeitenNco1-Anexo4-Bioseguridad en Odontologia Norma Tecnica MinsaColegio Odontológico del Perú100% (1)
- Temario Enao 2018Dokument4 SeitenTemario Enao 2018Flor Reyes FuentesNoch keine Bewertungen
- Clase A Categoría Iiia - NuevoDokument27 SeitenClase A Categoría Iiia - NuevoChristian RodriguezNoch keine Bewertungen
- AcrílicoDokument7 SeitenAcrílicoRodrigo MYNoch keine Bewertungen
- Antisepticos y Desinfectantes IIDokument77 SeitenAntisepticos y Desinfectantes IIAngel SanchezNoch keine Bewertungen
- Planos ViviendaDokument20 SeitenPlanos Viviendajose huamanNoch keine Bewertungen
- 20190715081517712mate Andres JuliacaDokument11 Seiten20190715081517712mate Andres JuliacaRodrigo MYNoch keine Bewertungen
- GPS ProcDeCampoDokument35 SeitenGPS ProcDeCampoALACEVEDOTNoch keine Bewertungen
- Folleto Version SeptiembreDokument58 SeitenFolleto Version SeptiembreAlex Uriel MamaniNoch keine Bewertungen
- Calculadora TI 83Dokument11 SeitenCalculadora TI 83Isaac PoetaNoch keine Bewertungen
- Ejercicios Resueltos de FriccionDokument8 SeitenEjercicios Resueltos de FriccionZinitop Danielitop60% (10)
- Tarea 10 de FisicaDokument9 SeitenTarea 10 de FisicaKenelma RiosNoch keine Bewertungen
- CosmosDokument2 SeitenCosmosEDGAR ALEJANDRO ACOSTA VÁSQUEZNoch keine Bewertungen
- Formacion de Imágenes en Espejos PlanosDokument15 SeitenFormacion de Imágenes en Espejos PlanosOscar Giraldo CabreraNoch keine Bewertungen
- Ley Snell Principio de Huygens y FermatDokument27 SeitenLey Snell Principio de Huygens y FermatLuz Estrella ParqueNoch keine Bewertungen
- Espejos Esféricos Convexos: Marianita Luigi Quiñones Barragan Juan Flolres Maicol HerreraDokument19 SeitenEspejos Esféricos Convexos: Marianita Luigi Quiñones Barragan Juan Flolres Maicol Herreraalejandra urregoNoch keine Bewertungen
- Diapositivas Sistemas TrifasicosDokument20 SeitenDiapositivas Sistemas Trifasicospaola atencioNoch keine Bewertungen
- Fisica 11-3,11-4,11-5 (Espejos y Lentes)Dokument9 SeitenFisica 11-3,11-4,11-5 (Espejos y Lentes)Jeico BruxNoch keine Bewertungen
- LAB1Y2Dokument6 SeitenLAB1Y2Belen LWNoch keine Bewertungen
- HT No. 12 Examen FinalDokument5 SeitenHT No. 12 Examen Finaltony sirin0% (1)
- Fisica 1 Colegio de Bachilleres Del Estado de ChihuahuaDokument11 SeitenFisica 1 Colegio de Bachilleres Del Estado de ChihuahuaDjBrandy Inthemix Al MaximoNoch keine Bewertungen
- CAPITULO V Dinamica Sistema ParticulasDokument12 SeitenCAPITULO V Dinamica Sistema ParticulasyonelNoch keine Bewertungen
- Construcción de Un Telescopio ReflectorDokument15 SeitenConstrucción de Un Telescopio ReflectorLuis Garcia FernandezNoch keine Bewertungen
- 2.4 Sensores de Presencia OpticosDokument12 Seiten2.4 Sensores de Presencia OpticosDarwin BVNoch keine Bewertungen
- Ejercicios Inercias Mohr (31-67) - 1Dokument37 SeitenEjercicios Inercias Mohr (31-67) - 1Freddy QuNoch keine Bewertungen
- 01 Campo Electrico Parte 1Dokument59 Seiten01 Campo Electrico Parte 1Paul ToscanoNoch keine Bewertungen
- Vray 3.6 PDFDokument98 SeitenVray 3.6 PDFEncarnacion Garcia Martos71% (7)
- Velocidad y Aceleracion Laboratorio FisicaDokument10 SeitenVelocidad y Aceleracion Laboratorio FisicaLutzScholzNoch keine Bewertungen
- Optica SerunaDokument4 SeitenOptica SerunaRonald ChoqueNoch keine Bewertungen
- Test Sensoriales Cuadro PDFDokument4 SeitenTest Sensoriales Cuadro PDFCaroll Coronel100% (2)
- Test de ElectrostaticaDokument3 SeitenTest de ElectrostaticaguizellyNoch keine Bewertungen
- Lectura 4Dokument5 SeitenLectura 4XAANNoch keine Bewertungen
- Internet y La AstronomíaDokument4 SeitenInternet y La AstronomíaDiego Raul Vaca OlveaNoch keine Bewertungen
- ElectricidadDokument14 SeitenElectricidadrichard_17dNoch keine Bewertungen
- Dge019 T 3 1989Dokument13 SeitenDge019 T 3 1989Richard Callo CNoch keine Bewertungen
- C. Inca Taller Eficiencia de Maquinas Electricas, Arranque Estrella TriánguloDokument11 SeitenC. Inca Taller Eficiencia de Maquinas Electricas, Arranque Estrella TriánguloLorena MartínezNoch keine Bewertungen
- Físico: Edgar NINACHI Condori.: Lentes - Fisica ModernaDokument6 SeitenFísico: Edgar NINACHI Condori.: Lentes - Fisica ModernaJulio CajigasNoch keine Bewertungen
- Capitulo 3 W-E PDFDokument10 SeitenCapitulo 3 W-E PDFMicaela GodoyNoch keine Bewertungen
- Informe 2 Interferencia y DifraccionDokument7 SeitenInforme 2 Interferencia y DifraccionDeivis J' GutierrezNoch keine Bewertungen