Das könnte Ihnen auch gefallen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- Data Structures Notes 2 - TutorialsDuniyaDokument138 SeitenData Structures Notes 2 - TutorialsDuniyaSana Mateen100% (1)
- AI NotesDokument121 SeitenAI NotesSalini Suresh50% (2)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Convolutional Neural Network Architecture - CNN ArchitectureDokument13 SeitenConvolutional Neural Network Architecture - CNN ArchitectureRathi PriyaNoch keine Bewertungen
- Types of Drag on Aircraft ExplainedDokument20 SeitenTypes of Drag on Aircraft ExplainedPramod DhaigudeNoch keine Bewertungen
- TP1-W2-S3 YudhaDokument7 SeitenTP1-W2-S3 YudhaKho Via0% (1)
- Chapter-1: Savitribai Phule Pune UniversityDokument68 SeitenChapter-1: Savitribai Phule Pune UniversityPramod DhaigudeNoch keine Bewertungen
- D3a Ae4iDokument1 SeiteD3a Ae4iPramod DhaigudeNoch keine Bewertungen
- Naresh SynopsisDokument8 SeitenNaresh SynopsisPramod DhaigudeNoch keine Bewertungen
- Total Marks Out of (10 X No - of Expt.) PA Marks of Practical Converted According To T.E. Scheme (Max. Marks.)Dokument22 SeitenTotal Marks Out of (10 X No - of Expt.) PA Marks of Practical Converted According To T.E. Scheme (Max. Marks.)Pramod DhaigudeNoch keine Bewertungen
- "Design Analysis and Weight Optimization of Gudgeon Pin": College of Engineering, Malegaon (BK.)Dokument3 Seiten"Design Analysis and Weight Optimization of Gudgeon Pin": College of Engineering, Malegaon (BK.)Pramod DhaigudeNoch keine Bewertungen
- 52 EfsdfDokument34 Seiten52 EfsdfPramod DhaigudeNoch keine Bewertungen
- SDGSDGDokument34 SeitenSDGSDGPramod DhaigudeNoch keine Bewertungen
- WefDokument60 SeitenWefPramod DhaigudeNoch keine Bewertungen
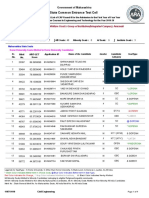
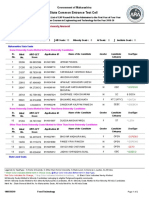
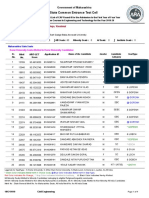
- State Common Entrance Test Cell: 1105 Prof. Ram Meghe Institute of Technology & Research, AmravatiDokument60 SeitenState Common Entrance Test Cell: 1105 Prof. Ram Meghe Institute of Technology & Research, AmravatiPramod DhaigudeNoch keine Bewertungen
- Acknowledgement: Prof. (DR.) S. S. Patil, Head, Department of Mechanical Engineering, SVPM's CollegeDokument8 SeitenAcknowledgement: Prof. (DR.) S. S. Patil, Head, Department of Mechanical Engineering, SVPM's CollegePramod DhaigudeNoch keine Bewertungen
- Capr-Iii En1002 PDFDokument39 SeitenCapr-Iii En1002 PDFPramod DhaigudeNoch keine Bewertungen
- State Common Entrance Test Cell: 1005 Sant Gadge Baba Amravati University, AmravatiDokument16 SeitenState Common Entrance Test Cell: 1005 Sant Gadge Baba Amravati University, AmravatiPramod DhaigudeNoch keine Bewertungen
- State Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonDokument28 SeitenState Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonPramod DhaigudeNoch keine Bewertungen
- State Common Entrance Test CellDokument35 SeitenState Common Entrance Test CellPramod DhaigudeNoch keine Bewertungen
- 12 eDokument30 Seiten12 ePramod DhaigudeNoch keine Bewertungen
- Maharashtra Engineering Admission ListDokument40 SeitenMaharashtra Engineering Admission ListPramod DhaigudeNoch keine Bewertungen
- State Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonDokument28 SeitenState Common Entrance Test Cell: 1101 Shri Sant Gajanan Maharaj College of Engineering, ShegaonPramod DhaigudeNoch keine Bewertungen
- State Common Entrance Test Cell: 1002 Government College of Engineering, AmravatiDokument40 SeitenState Common Entrance Test Cell: 1002 Government College of Engineering, AmravatiPramod DhaigudeNoch keine Bewertungen
- State Common Entrance Test Cell: 1012 Government Engineering College, YavatmalDokument30 SeitenState Common Entrance Test Cell: 1012 Government Engineering College, YavatmalPramod DhaigudeNoch keine Bewertungen
- RWDokument29 SeitenRWPramod DhaigudeNoch keine Bewertungen
- Automobile Drag CoefficientsDokument5 SeitenAutomobile Drag CoefficientsPramod DhaigudeNoch keine Bewertungen
- A Streamlined Object Will Cut Through The Air With Less ResistanceDokument32 SeitenA Streamlined Object Will Cut Through The Air With Less ResistancePramod DhaigudeNoch keine Bewertungen
- Maharashtra engineering admission listDokument16 SeitenMaharashtra engineering admission listPramod DhaigudeNoch keine Bewertungen
- Lva1 App6891 PDFDokument94 SeitenLva1 App6891 PDFPramod DhaigudeNoch keine Bewertungen
- How Aerodynamic Drag Affects Vehicle PerformanceDokument74 SeitenHow Aerodynamic Drag Affects Vehicle PerformancePramod DhaigudeNoch keine Bewertungen
- Vehicle AerodynamicsDokument24 SeitenVehicle Aerodynamicsex10148Noch keine Bewertungen
- Streamlining Your Body Reduces The Friction of Movement To A Minimum Thus Decreasing Overall DragDokument3 SeitenStreamlining Your Body Reduces The Friction of Movement To A Minimum Thus Decreasing Overall DragPramod DhaigudeNoch keine Bewertungen
- Advantages of FFT Spectrum Analyzer TechnologyDokument2 SeitenAdvantages of FFT Spectrum Analyzer TechnologyPramod DhaigudeNoch keine Bewertungen
- Difference Between Wideband Frequency Modulation and Narrowband Frequency ModulationDokument1 SeiteDifference Between Wideband Frequency Modulation and Narrowband Frequency ModulationPramod DhaigudeNoch keine Bewertungen
- Kleene's Theorem Explains Equivalence of Regular LanguagesDokument7 SeitenKleene's Theorem Explains Equivalence of Regular LanguagesAdila YounusNoch keine Bewertungen
- Introduction To Discrete Event SystemsDokument10 SeitenIntroduction To Discrete Event SystemsMr KevinNoch keine Bewertungen
- Main Report For Experiment 1Dokument26 SeitenMain Report For Experiment 1이민우Noch keine Bewertungen
- Wrapper ClassDokument6 SeitenWrapper ClassgurusodhiiNoch keine Bewertungen
- m4 Boolean AlgebraDokument19 Seitenm4 Boolean AlgebraFidel DaSilvaNoch keine Bewertungen
- CS416 - Parallel and Distributed Computing: Lecture # 6 (19-03-2021) Spring 2021 FAST - NUCES, Faisalabad CampusDokument31 SeitenCS416 - Parallel and Distributed Computing: Lecture # 6 (19-03-2021) Spring 2021 FAST - NUCES, Faisalabad CampusRao UsamaNoch keine Bewertungen
- Answer: Code Words Creates B. Invalid Codeword C. Valid Data D. Invalid DataDokument15 SeitenAnswer: Code Words Creates B. Invalid Codeword C. Valid Data D. Invalid Datasan4u401Noch keine Bewertungen
- Data Structure KCS301Dokument2 SeitenData Structure KCS301avinas_3marNoch keine Bewertungen
- lAB MANUAL Data Structures Using C (Final)Dokument73 SeitenlAB MANUAL Data Structures Using C (Final)SATYAM JHANoch keine Bewertungen
- L04B - Sampling, Quantization, and CodingDokument15 SeitenL04B - Sampling, Quantization, and CodingKat AkovbNoch keine Bewertungen
- OO Case Studies With Patterns and C++Dokument26 SeitenOO Case Studies With Patterns and C++Imre TuskeNoch keine Bewertungen
- Req-Yolo: A Resource-Aware, Efficient Quantization Framework For Object Detection On FpgasDokument22 SeitenReq-Yolo: A Resource-Aware, Efficient Quantization Framework For Object Detection On FpgasamanNoch keine Bewertungen
- TLComp introTLDokument19 SeitenTLComp introTLhotfuryNoch keine Bewertungen
- Adversarial Search and Game-PlayingDokument27 SeitenAdversarial Search and Game-PlayingCG Art VfxNoch keine Bewertungen
- Pre Release Solution MAY JUNE 2021Dokument11 SeitenPre Release Solution MAY JUNE 2021Hassaan KhanNoch keine Bewertungen
- Effectively use reduction clauses to parallelize loops summing valuesDokument1 SeiteEffectively use reduction clauses to parallelize loops summing valuesbsgindia82Noch keine Bewertungen
- Reed Solomon Encoder C Model (Comment # 234) : Martin Langhammer September 2012Dokument9 SeitenReed Solomon Encoder C Model (Comment # 234) : Martin Langhammer September 2012ramesh chivukulaNoch keine Bewertungen
- Fuzzy Expert SystemDokument20 SeitenFuzzy Expert SystemAditya KumarNoch keine Bewertungen
- Quiz Based On CO 3 Data Compression (RCS - 087) : Email AddressDokument4 SeitenQuiz Based On CO 3 Data Compression (RCS - 087) : Email AddressAnchit AggarwalNoch keine Bewertungen
- Lab14 ManualDokument2 SeitenLab14 ManualgirliepoplollipopNoch keine Bewertungen
- Certificate FormatDokument3 SeitenCertificate FormatSudheerNoch keine Bewertungen
- Havel HakimiDokument3 SeitenHavel HakimiSwarvanu MeddaNoch keine Bewertungen
- 1.3 Algorithms and ConvergenceDokument13 Seiten1.3 Algorithms and Convergenceسعود يحيىNoch keine Bewertungen
- (IIT Guwahati) VLSI Design Verification and TestDokument4 Seiten(IIT Guwahati) VLSI Design Verification and Testjitu_4Noch keine Bewertungen
- Derivation of Newton Divided Difference PolynomialDokument3 SeitenDerivation of Newton Divided Difference PolynomialSyed UmairNoch keine Bewertungen
- Linear Programming Problem Optimal Solution and Variable RangesDokument5 SeitenLinear Programming Problem Optimal Solution and Variable RangesnursyahirahmNoch keine Bewertungen