Das könnte Ihnen auch gefallen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5794)
- Pub059-023!00!1100 (Pakscan Paktester Field Test Unit Technical Manual)Dokument82 SeitenPub059-023!00!1100 (Pakscan Paktester Field Test Unit Technical Manual)apisituNoch keine Bewertungen
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (399)
- Pub059-020-00 - 0100 (Pakscan Integral FCU (Field Control Unit) Technical Manual) PDFDokument34 SeitenPub059-020-00 - 0100 (Pakscan Integral FCU (Field Control Unit) Technical Manual) PDFapisituNoch keine Bewertungen
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- Lightning and Surge Protection Methods for Pakscan SystemsDokument2 SeitenLightning and Surge Protection Methods for Pakscan SystemsapisituNoch keine Bewertungen
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (894)
- 95 8526 20.3 - (Pirecl)Dokument80 Seiten95 8526 20.3 - (Pirecl)apisituNoch keine Bewertungen
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- PUB060-001-00 - 1110 RCL NetworksDokument8 SeitenPUB060-001-00 - 1110 RCL NetworksapisituNoch keine Bewertungen
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- Case Study ABB enDokument3 SeitenCase Study ABB enapisituNoch keine Bewertungen
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- Pakscan CatalogueDokument32 SeitenPakscan CatalogueragulNoch keine Bewertungen
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Packscan InfoDokument4 SeitenPackscan InfosathyasingNoch keine Bewertungen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (587)
- Pakscan CatalogueDokument32 SeitenPakscan CatalogueragulNoch keine Bewertungen
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (265)
- Pub059-035!00!1116 (Pakscan FCU (Field Control Unit) Technical Manual For IQ3 CVA CMA)Dokument52 SeitenPub059-035!00!1116 (Pakscan FCU (Field Control Unit) Technical Manual For IQ3 CVA CMA)apisituNoch keine Bewertungen
- HPSTerminal Automation Brochure 020910 Rev 4 EopDokument8 SeitenHPSTerminal Automation Brochure 020910 Rev 4 Eopgtimber99Noch keine Bewertungen
- HPSTerminal Automation Brochure 020910 Rev 4 EopDokument8 SeitenHPSTerminal Automation Brochure 020910 Rev 4 Eopgtimber99Noch keine Bewertungen
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Pakscan CatalogueDokument32 SeitenPakscan CatalogueragulNoch keine Bewertungen
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (73)
- Pub059-023!00!1100 (Pakscan Paktester Field Test Unit Technical Manual)Dokument82 SeitenPub059-023!00!1100 (Pakscan Paktester Field Test Unit Technical Manual)apisituNoch keine Bewertungen
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (344)
- PUB060-001-00 - 1110 RCL NetworksDokument8 SeitenPUB060-001-00 - 1110 RCL NetworksapisituNoch keine Bewertungen
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- Spds Electronic SealDokument4 SeitenSpds Electronic SealapisituNoch keine Bewertungen
- OrbitX - Remote Assistance SetupDokument136 SeitenOrbitX - Remote Assistance SetupapisituNoch keine Bewertungen
- PUB060-001-00 - 1110 RCL NetworksDokument8 SeitenPUB060-001-00 - 1110 RCL NetworksapisituNoch keine Bewertungen
- OrbitX - Remote Assistance Setup PDFDokument10 SeitenOrbitX - Remote Assistance Setup PDFapisituNoch keine Bewertungen
- Bartec AUTDokument12 SeitenBartec AUTapisituNoch keine Bewertungen
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- 980402Dokument8 Seiten980402apisituNoch keine Bewertungen
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2219)
- New Generation Pakscan Master Station: Key BenefitsDokument8 SeitenNew Generation Pakscan Master Station: Key BenefitsapisituNoch keine Bewertungen
- 970803Dokument4 Seiten970803apisituNoch keine Bewertungen
- 980501Dokument21 Seiten980501apisituNoch keine Bewertungen
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- Peer-to-Peer Basics: Date: 05 22 03 Author(s) : Kenneth D. ElliottDokument12 SeitenPeer-to-Peer Basics: Date: 05 22 03 Author(s) : Kenneth D. ElliottapisituNoch keine Bewertungen
- General Specifications: YokogawaDokument16 SeitenGeneral Specifications: YokogawaapisituNoch keine Bewertungen
- Omni Flow Computer Modbus: DatabaseDokument12 SeitenOmni Flow Computer Modbus: DatabaseapisituNoch keine Bewertungen
- 960702Dokument4 Seiten960702apisituNoch keine Bewertungen
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (119)
- 960701Dokument12 Seiten960701apisituNoch keine Bewertungen
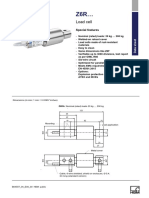
- Z6R DSDokument8 SeitenZ6R DSivanzeab2770Noch keine Bewertungen
- Library BooksDokument30 SeitenLibrary BooksAnonymous ZS0ZWi4K740% (5)
- Catalog Pneumercator tms3000 Spec SheetDokument2 SeitenCatalog Pneumercator tms3000 Spec SheetEdgar P. Putong Jr.Noch keine Bewertungen
- Antonio C. M. de Queiroz Home PageDokument3 SeitenAntonio C. M. de Queiroz Home PageAurel DanutNoch keine Bewertungen
- Sounder PDFDokument2 SeitenSounder PDFPercy GoitsemangNoch keine Bewertungen
- 3-Phase grid connected PV Inverter design simulationDokument9 Seiten3-Phase grid connected PV Inverter design simulationNguyen KhoaNoch keine Bewertungen
- Avizia Horus Scope: Focus On Enhancing TelemedicineDokument4 SeitenAvizia Horus Scope: Focus On Enhancing TelemedicineL2D TelemedicinaNoch keine Bewertungen
- TELES IGATE 16.2 ReferenceManual 001Dokument265 SeitenTELES IGATE 16.2 ReferenceManual 001MiguelNoch keine Bewertungen
- VI Characteristics of DiodeDokument5 SeitenVI Characteristics of DiodeRashid Rind Rashid RindNoch keine Bewertungen
- User Manual Product Description Static Switch SSW 7500A/30000A-230Dokument18 SeitenUser Manual Product Description Static Switch SSW 7500A/30000A-230moumen BoughraraNoch keine Bewertungen
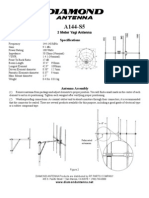
- Diamond Antenna - A144s5Dokument2 SeitenDiamond Antenna - A144s5pepanc036gkNoch keine Bewertungen
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- VP1000 SpecificationDokument5 SeitenVP1000 SpecificationMarcio Araujo SilvaNoch keine Bewertungen
- Eurotherm 818p PDFDokument2 SeitenEurotherm 818p PDFKris0% (1)
- Unit 1 and 2 PPTsDokument81 SeitenUnit 1 and 2 PPTsKundankumar Saraf100% (2)
- Centralised Systems CB For Emergency LightingDokument3 SeitenCentralised Systems CB For Emergency Lightingnicky_balanNoch keine Bewertungen
- Navigation InstrumentsDokument14 SeitenNavigation InstrumentsJabez RichardsNoch keine Bewertungen
- UMTS 7 1 KPI Quick Ref RC Aug2013 PDFDokument307 SeitenUMTS 7 1 KPI Quick Ref RC Aug2013 PDFShelton SizibaNoch keine Bewertungen
- Heathkit Test Equipment 1954Dokument44 SeitenHeathkit Test Equipment 1954Vasco MelloNoch keine Bewertungen
- CFAH 30P1200/S14 Capacitive Proximity SensorsDokument2 SeitenCFAH 30P1200/S14 Capacitive Proximity SensorscsystemsNoch keine Bewertungen
- Week # 9Dokument2 SeitenWeek # 9CH MUBASHER MAQSOOD ALAMNoch keine Bewertungen
- Zener Diode Basic Operation and ApplicationsDokument5 SeitenZener Diode Basic Operation and ApplicationsEvelyn P. GalanoNoch keine Bewertungen
- BW2175b 1Dokument2 SeitenBW2175b 1Alan Martin De La Cruz VazquezNoch keine Bewertungen
- ELectronic MediaDokument1 SeiteELectronic MediashahabkhankhattakNoch keine Bewertungen
- Circuit Theory BasicsDokument101 SeitenCircuit Theory BasicsEL DamascoNoch keine Bewertungen
- 27012471-SISO Wall Mount Antenna DatasheetDokument1 Seite27012471-SISO Wall Mount Antenna DatasheetСергей МирошниченкоNoch keine Bewertungen
- Experiment 1: 1 ObjectiveDokument6 SeitenExperiment 1: 1 ObjectiveEnver Kaan ÇabukNoch keine Bewertungen
- Alcatel 4049 Attendant Console User ManualDokument132 SeitenAlcatel 4049 Attendant Console User ManualAriel BecerraNoch keine Bewertungen
- Pulse Modulation Consists Essentially of Sampling Analog Information Signals and Then ConvertingDokument40 SeitenPulse Modulation Consists Essentially of Sampling Analog Information Signals and Then ConvertingDaniel LoNoch keine Bewertungen
- Service Manual SONY LCD klv32bx350Dokument44 SeitenService Manual SONY LCD klv32bx350elec104Noch keine Bewertungen
- Defence Nationale: Defence Research Establishment Ottawa PCNDokument64 SeitenDefence Nationale: Defence Research Establishment Ottawa PCNAlver TuizaNoch keine Bewertungen
- The Fabric of Civilization: How Textiles Made the WorldVon EverandThe Fabric of Civilization: How Textiles Made the WorldBewertung: 4.5 von 5 Sternen4.5/5 (57)
- Sully: The Untold Story Behind the Miracle on the HudsonVon EverandSully: The Untold Story Behind the Miracle on the HudsonBewertung: 4 von 5 Sternen4/5 (103)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureVon EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureBewertung: 5 von 5 Sternen5/5 (124)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestVon EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestBewertung: 4 von 5 Sternen4/5 (28)
- Recording Unhinged: Creative and Unconventional Music Recording TechniquesVon EverandRecording Unhinged: Creative and Unconventional Music Recording TechniquesNoch keine Bewertungen
- Pale Blue Dot: A Vision of the Human Future in SpaceVon EverandPale Blue Dot: A Vision of the Human Future in SpaceBewertung: 4.5 von 5 Sternen4.5/5 (586)
- Highest Duty: My Search for What Really MattersVon EverandHighest Duty: My Search for What Really MattersNoch keine Bewertungen
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaVon EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNoch keine Bewertungen
- The Weather Machine: A Journey Inside the ForecastVon EverandThe Weather Machine: A Journey Inside the ForecastBewertung: 3.5 von 5 Sternen3.5/5 (31)