Das könnte Ihnen auch gefallen
- Cours RDM ENIMDokument91 SeitenCours RDM ENIMAhmed Nadi100% (1)
- Nait Hamoud Et Djedi ENPDokument32 SeitenNait Hamoud Et Djedi ENPAmine Nait100% (1)
- Methode de Guyon-MassonnetDokument11 SeitenMethode de Guyon-MassonnetAmine Nait100% (1)
- Modes Operatoires Des Travaux de Gros Oeuvre PDFDokument68 SeitenModes Operatoires Des Travaux de Gros Oeuvre PDFPavel Morati90% (10)
- Pathologie Pathologie Des Structures Des Structures Métalliques MétalliquesDokument69 SeitenPathologie Pathologie Des Structures Des Structures Métalliques MétalliquesAdel Abel67% (3)
- Travaux Pratiques Energie Mécanique: Hassane Moustabchir Mécanique - Génie Mécanique - Génie CivilDokument111 SeitenTravaux Pratiques Energie Mécanique: Hassane Moustabchir Mécanique - Génie Mécanique - Génie CivilOumayma DouichiNoch keine Bewertungen
- Chap 4 Durabilite Des AciersDokument15 SeitenChap 4 Durabilite Des AciersAhmed InfirmierNoch keine Bewertungen
- Boulons Ordinaires - ExercicesDokument22 SeitenBoulons Ordinaires - ExercicesMsdNoch keine Bewertungen
- Modélisations AbaqusDokument7 SeitenModélisations AbaqusSara BACHIRNoch keine Bewertungen
- TP AbaqusDokument5 SeitenTP Abaqusprof physiqueNoch keine Bewertungen
- EcrouissageDokument4 SeitenEcrouissageAlexis0% (1)
- TD Elements Finis CanalDokument8 SeitenTD Elements Finis CanalMourad TargaouiNoch keine Bewertungen
- Examen Métallique 1 2011 - 2012Dokument2 SeitenExamen Métallique 1 2011 - 2012Neo PacifistaNoch keine Bewertungen
- Exposé Sur Les Boulons Précontraints (29-10-2014)Dokument23 SeitenExposé Sur Les Boulons Précontraints (29-10-2014)Lyora DavNoch keine Bewertungen
- Cours MEFDokument10 SeitenCours MEFRadhi BHNoch keine Bewertungen
- TD Calcul Res SoudureDokument2 SeitenTD Calcul Res SoudureMounir FrijaNoch keine Bewertungen
- Test TP Mef 2020 - 2021Dokument3 SeitenTest TP Mef 2020 - 2021Adel NeymoNoch keine Bewertungen
- Tp1 Poutre en FlexionDokument15 SeitenTp1 Poutre en FlexionYassine EL FAKHAOUINoch keine Bewertungen
- Poteau Armatures PDFDokument4 SeitenPoteau Armatures PDFANDRIAMANANTSOANoch keine Bewertungen
- Ex Ef Matrice Raideur PoutreDokument3 SeitenEx Ef Matrice Raideur Poutreipman99Noch keine Bewertungen
- TheseDokument163 SeitenTheseŠø FįåÑėNoch keine Bewertungen
- ApplicationsDokument41 SeitenApplicationsroma JamanNoch keine Bewertungen
- GCI 210 Résistance Des MatériauxDokument4 SeitenGCI 210 Résistance Des Matériauxmarf1912Noch keine Bewertungen
- Assemblage S 11Dokument8 SeitenAssemblage S 11Sara BoucheloucheNoch keine Bewertungen
- Exam 2016Dokument3 SeitenExam 2016SamNoch keine Bewertungen
- Chapitre 5 Torsion SimpleDokument12 SeitenChapitre 5 Torsion SimpleTech KingNoch keine Bewertungen
- DurcissementDokument3 SeitenDurcissementpabouch100% (2)
- Assemblage 2021Dokument40 SeitenAssemblage 2021Charaf HeniNoch keine Bewertungen
- L3-GC-Construction Métallique Cours 5Dokument7 SeitenL3-GC-Construction Métallique Cours 5Tarike ZohirNoch keine Bewertungen
- RDM Examen 01Dokument5 SeitenRDM Examen 01Youness ZahiNoch keine Bewertungen
- Traction - Compression GC 2012Dokument13 SeitenTraction - Compression GC 2012Soumaya MerimiNoch keine Bewertungen
- Exercice Fluage D'une Poutre en FlexionDokument4 SeitenExercice Fluage D'une Poutre en FlexionScribd ReaderNoch keine Bewertungen
- Ouvrage 2 Concours Technologue Session 2015 Slim ChouchenDokument172 SeitenOuvrage 2 Concours Technologue Session 2015 Slim ChouchenYamen Ben AmmarNoch keine Bewertungen
- Mode Emploi AbaqusDokument27 SeitenMode Emploi Abaqusaziz loudNoch keine Bewertungen
- Module 08 Connaissance de La RDMDokument49 SeitenModule 08 Connaissance de La RDMSAID EL KHATTABI100% (1)
- Plan D'ensemble + Détails de Charpente MétalliqueDokument2 SeitenPlan D'ensemble + Détails de Charpente MétalliqueAbdoul GadirouNoch keine Bewertungen
- TD - Modélisation Élasto-PlasticitéDokument4 SeitenTD - Modélisation Élasto-PlasticitéHamza MokhtariNoch keine Bewertungen
- ApplicationsDokument15 SeitenApplicationsroma JamanNoch keine Bewertungen
- Série Sur Les PannesDokument3 SeitenSérie Sur Les PannestoufikNoch keine Bewertungen
- Composites PDFDokument102 SeitenComposites PDFMaria100% (2)
- Etude de La Conjonction Poutre PlaqueDokument137 SeitenEtude de La Conjonction Poutre PlaqueHammam KalouchNoch keine Bewertungen
- Modele Elasto-PlastiqueDokument9 SeitenModele Elasto-PlastiqueflinnmaxNoch keine Bewertungen
- 669 1 PDFDokument4 Seiten669 1 PDFMohsen LaabidiNoch keine Bewertungen
- Elasticité Chap1 2019 2020 PDFDokument32 SeitenElasticité Chap1 2019 2020 PDFsara marrokNoch keine Bewertungen
- Concepts Fondamentaux de La Mécanique de La Rupture: Master Mécanique-Matériaux-Structures-ProcédésDokument36 SeitenConcepts Fondamentaux de La Mécanique de La Rupture: Master Mécanique-Matériaux-Structures-ProcédésnacerazizNoch keine Bewertungen
- Chapitre 05 Etude PlancherDokument13 SeitenChapitre 05 Etude PlancherTriki SamirNoch keine Bewertungen
- Cours CM 1 Chapitre 3 Eléments Comprimés en Construction Métallique 08 09Dokument15 SeitenCours CM 1 Chapitre 3 Eléments Comprimés en Construction Métallique 08 09Mohamed BensoulaNoch keine Bewertungen
- Critère de Plasticité - WikipédiaDokument41 SeitenCritère de Plasticité - Wikipédiaelie chane100% (1)
- Recherche Bibliographie Des PlaquesDokument17 SeitenRecherche Bibliographie Des PlaquesHako KhechaiNoch keine Bewertungen
- Comportement À La Flexion Des Poutres enDokument7 SeitenComportement À La Flexion Des Poutres enrayamNoch keine Bewertungen
- Examen Metallique 2012 - 2013Dokument1 SeiteExamen Metallique 2012 - 2013Neo PacifistaNoch keine Bewertungen
- 1-Flexion de Poutre PDFDokument6 Seiten1-Flexion de Poutre PDFchafqNoch keine Bewertungen
- MoulageDokument17 SeitenMoulageNajib Nouisser100% (1)
- Abaqus Prise en MainDokument8 SeitenAbaqus Prise en MainDeghboudj SamirNoch keine Bewertungen
- EXERCICESDokument82 SeitenEXERCICESChaimae SarghiniNoch keine Bewertungen
- TD 1 CharpenteDokument2 SeitenTD 1 Charpentekaouthersalhi343Noch keine Bewertungen
- Chapitre 8 Partie 2 - CALCUL DES SOUDURESDokument8 SeitenChapitre 8 Partie 2 - CALCUL DES SOUDURESCara mellaNoch keine Bewertungen
- Soudix AideDokument17 SeitenSoudix Aidepalary18Noch keine Bewertungen
- Chapitre 2 - Les Assemblages BoulonnésDokument14 SeitenChapitre 2 - Les Assemblages Boulonnésyasmine hadjsadokNoch keine Bewertungen
- Chapitre 3. Caractéristiques Géométriques Des Sections PlanesDokument12 SeitenChapitre 3. Caractéristiques Géométriques Des Sections PlanesBakary KeitaNoch keine Bewertungen
- Travaux Pratique de Mécanique Des Solides DéformablesDokument21 SeitenTravaux Pratique de Mécanique Des Solides DéformablesMehdi Chams Eddine FarahNoch keine Bewertungen
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceVon EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceNoch keine Bewertungen
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysVon EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysNoch keine Bewertungen
- ProgrammationDokument9 SeitenProgrammationAbd ElmalikNoch keine Bewertungen
- DM Tunell Mohamed Amine Nait Hamoud ENPDokument10 SeitenDM Tunell Mohamed Amine Nait Hamoud ENPAmine NaitNoch keine Bewertungen
- Amine Nait Hamoud PontDokument14 SeitenAmine Nait Hamoud PontAmine NaitNoch keine Bewertungen
- 1 PortiqueDokument2 Seiten1 PortiqueZakaria MaazazNoch keine Bewertungen
- Memoire Finale PDFDokument116 SeitenMemoire Finale PDFAmine Nait100% (2)
- Etude D'un Batiment en (R+8+s.sol) À Usage Multiples Contreventé Par Un Système Mixte (Voiles-Portiques) PDFDokument212 SeitenEtude D'un Batiment en (R+8+s.sol) À Usage Multiples Contreventé Par Un Système Mixte (Voiles-Portiques) PDFAmine NaitNoch keine Bewertungen
- Chapitre 4 Les Pylones 1Dokument29 SeitenChapitre 4 Les Pylones 1BillalNoch keine Bewertungen
- PFE GC STR 2019Dokument241 SeitenPFE GC STR 2019Abd Errahmane OuainiNoch keine Bewertungen
- Fiche Technique 42.5 NDokument1 SeiteFiche Technique 42.5 Nsapta polebejaiaNoch keine Bewertungen
- Panne ZedDokument15 SeitenPanne ZedhejerNoch keine Bewertungen
- Gamme Sismique 2020Dokument1 SeiteGamme Sismique 2020ykmail0582Noch keine Bewertungen
- BA Pour Dessin de FerraillageDokument21 SeitenBA Pour Dessin de FerraillageMed Amine RifiNoch keine Bewertungen
- Etude Dynamique D'un Bâtiment R+4 À Usage D'habitation en Béton ArméDokument152 SeitenEtude Dynamique D'un Bâtiment R+4 À Usage D'habitation en Béton ArméSalah MihoubiNoch keine Bewertungen
- O13 - Exemple - 3 - Poutre Mixte Continue de 3 TravéesDokument44 SeitenO13 - Exemple - 3 - Poutre Mixte Continue de 3 TravéesCharly Abou Adas100% (1)
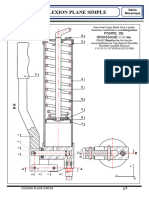
- Flexion Plane SimpleDokument7 SeitenFlexion Plane SimpletaiebshowNoch keine Bewertungen
- Annales ITBTP N°278 - Murs À Ouvertures Multiples - Coin-Decauchy 1971 PDFDokument20 SeitenAnnales ITBTP N°278 - Murs À Ouvertures Multiples - Coin-Decauchy 1971 PDFsautier_thomasNoch keine Bewertungen
- FS12 BFDokument28 SeitenFS12 BFmed elhilaliNoch keine Bewertungen
- BFC BpeDokument10 SeitenBFC BpeZaka Ria100% (1)
- Etudes Formulation de Béton Type Roulé Et Concassé BbaDokument7 SeitenEtudes Formulation de Béton Type Roulé Et Concassé Bbaamical1955Noch keine Bewertungen
- Analyse Des Caractéristiques Mécaniques Des Matériaux Utilisés en Construction Mixte (Acier-Béton)Dokument89 SeitenAnalyse Des Caractéristiques Mécaniques Des Matériaux Utilisés en Construction Mixte (Acier-Béton)Rayan BITOUTNoch keine Bewertungen
- Appreciation Technique D'Experimentation: Numéro de Référence CSTB: 2847 - V2Dokument55 SeitenAppreciation Technique D'Experimentation: Numéro de Référence CSTB: 2847 - V2abdelfattahelhassNoch keine Bewertungen
- 02tableaux AciersDokument4 Seiten02tableaux Aciersnsouli1100% (5)
- Effort Tranchant PoutreDokument1 SeiteEffort Tranchant PoutreBec RoudaynaNoch keine Bewertungen
- 3.1 Formation RSA - PrédimensionnementDokument22 Seiten3.1 Formation RSA - PrédimensionnementFranc-junior FokaNoch keine Bewertungen
- TD Métré de Ferraillage D'une FondationDokument11 SeitenTD Métré de Ferraillage D'une FondationSali Douae100% (1)
- Ms - Gc. RekkabDokument92 SeitenMs - Gc. RekkabothmanNoch keine Bewertungen
- Augc2015 Boukhelkhal Djamila 01 2Dokument9 SeitenAugc2015 Boukhelkhal Djamila 01 2Berzigue BelabbesNoch keine Bewertungen
- DALLAGESDokument12 SeitenDALLAGESKevin Henoc AYI100% (1)
- Méthode de Dreux-GorisseDokument13 SeitenMéthode de Dreux-GorissegueurNoch keine Bewertungen
- Ferraillage - Travaux de FerraillageDokument41 SeitenFerraillage - Travaux de FerraillageChristianNoch keine Bewertungen
- Dossier Technique DependanceDokument25 SeitenDossier Technique DependancemarthialprofNoch keine Bewertungen
- Completion Procedure of The Grout WorksDokument9 SeitenCompletion Procedure of The Grout WorksAnonymous 3tjJtJesoNoch keine Bewertungen
- 2314PIKBOUGOUM Sandra FrancetteDokument292 Seiten2314PIKBOUGOUM Sandra FrancetteSiwar FatnassiNoch keine Bewertungen
- Paroi BerlinoiseDokument9 SeitenParoi BerlinoiseTaheni Ben AmorNoch keine Bewertungen