Das könnte Ihnen auch gefallen
- DCP-20 Genset Control ManualDokument65 SeitenDCP-20 Genset Control Manualandy habibiNoch keine Bewertungen
- Co2 Laser Card ManualDokument11 SeitenCo2 Laser Card ManualJuan Carlos CosmeNoch keine Bewertungen
- 数字硬件简卡英文Dokument11 Seiten数字硬件简卡英文johanes kharismaNoch keine Bewertungen
- Manual de Utilizare Detector de Gaz Metan Adresabil Cu Sirena UniPOS FD71CNGDokument4 SeitenManual de Utilizare Detector de Gaz Metan Adresabil Cu Sirena UniPOS FD71CNGAugustin CatineanNoch keine Bewertungen
- Model No.: SC + R9: RF 2.4G RGB/RGBW LED SPI Controller SetDokument4 SeitenModel No.: SC + R9: RF 2.4G RGB/RGBW LED SPI Controller SetkujaautumnNoch keine Bewertungen
- TU550A Auto Transfer Controller Operation Manual-1Dokument25 SeitenTU550A Auto Transfer Controller Operation Manual-1gonshui gonshuiNoch keine Bewertungen
- FR100 Series User Manual EN V1.320150325Dokument121 SeitenFR100 Series User Manual EN V1.320150325MD SHAHIN MIANoch keine Bewertungen
- User Manual of T22 Mini Frequency Inverter - 20230504150700Dokument17 SeitenUser Manual of T22 Mini Frequency Inverter - 20230504150700Yudha Panji RahmanNoch keine Bewertungen
- KFD2-SR2-2.W.SM Standstill ControllerDokument4 SeitenKFD2-SR2-2.W.SM Standstill ControllerrohitalurkarNoch keine Bewertungen
- Mid2e 800Dokument2 SeitenMid2e 800trungtrucnpNoch keine Bewertungen
- Gu641a Genset Control.Dokument55 SeitenGu641a Genset Control.semerucoccsNoch keine Bewertungen
- User Manual Instructions: Vishay Celtron Technologies IncDokument19 SeitenUser Manual Instructions: Vishay Celtron Technologies IncLupul NegruNoch keine Bewertungen
- By Ligo George MikroC, PIC Microcontroller InterfcingDokument5 SeitenBy Ligo George MikroC, PIC Microcontroller InterfcingLawrence NgariNoch keine Bewertungen
- Servo Stepper Driver UK 2 HSS86Dokument7 SeitenServo Stepper Driver UK 2 HSS86Mimo AbduNoch keine Bewertungen
- SMART Transmitter Power Supply KFD2-STC5-1.2O: FunctionDokument4 SeitenSMART Transmitter Power Supply KFD2-STC5-1.2O: Functionreza.05Noch keine Bewertungen
- 422680Dokument28 Seiten422680yomar villcas0% (1)
- FR100 Series User Manual en V1.5 20180511Dokument131 SeitenFR100 Series User Manual en V1.5 20180511RICHARD0% (2)
- User Manual: HAT520N Ats ControllerDokument15 SeitenUser Manual: HAT520N Ats ControllerChhoan NhunNoch keine Bewertungen
- Sony Ta Fe610r ManualDokument20 SeitenSony Ta Fe610r ManualbogdanovicNoch keine Bewertungen
- Lab 2Dokument12 SeitenLab 2Malik YousafNoch keine Bewertungen
- Gas Measurement and Warning: GMC 8022 From Version 814Dokument8 SeitenGas Measurement and Warning: GMC 8022 From Version 814jostek.016Noch keine Bewertungen
- LT230 Ine-307bDokument15 SeitenLT230 Ine-307bviscadanNoch keine Bewertungen
- Operator ManualDokument38 SeitenOperator Manualariel perezNoch keine Bewertungen
- Automatic Vehicle LocationDokument40 SeitenAutomatic Vehicle LocationTushar BhatnagarNoch keine Bewertungen
- MP2x8i NMEA Buffer: Installation and User ManualDokument2 SeitenMP2x8i NMEA Buffer: Installation and User ManualAbdul Wajid MNoch keine Bewertungen
- Inverter Powerflex 525 IntroductionDokument28 SeitenInverter Powerflex 525 IntroductionsonNoch keine Bewertungen
- Simatic FM 351: First Steps in CommissioningDokument6 SeitenSimatic FM 351: First Steps in CommissioningSam eagle goodNoch keine Bewertungen
- Programmable Controller Basics Programmable Controller BasicsDokument59 SeitenProgrammable Controller Basics Programmable Controller Basicsnikhil patelNoch keine Bewertungen
- Volvo 850 ODB A1 Automatic Transmission DiagnosticDokument9 SeitenVolvo 850 ODB A1 Automatic Transmission DiagnosticBartłomiej KilianNoch keine Bewertungen
- XK3118T1-W1: Indicator Operation ManualDokument10 SeitenXK3118T1-W1: Indicator Operation Manualمصطفى الكوتNoch keine Bewertungen
- IODokument4 SeitenIOFaisal Abdel RahmanNoch keine Bewertungen
- LXDC2HL - Series DatasheetDokument32 SeitenLXDC2HL - Series DatasheetAxel FoleyNoch keine Bewertungen
- GM8020/GM8021 Genset Controller: ManualDokument68 SeitenGM8020/GM8021 Genset Controller: ManualAnonNoch keine Bewertungen
- TB6600 User GuideDokument11 SeitenTB6600 User GuideRudyardo MartinezNoch keine Bewertungen
- KYL-813 User ManualDokument8 SeitenKYL-813 User ManualJosé Henríquez V.Noch keine Bewertungen
- The Clarification of Notation Used Within This Manual:: Warning: WarningDokument16 SeitenThe Clarification of Notation Used Within This Manual:: Warning: Warningandres tobonNoch keine Bewertungen
- PV PanelDokument17 SeitenPV PanelMuhammad RiazNoch keine Bewertungen
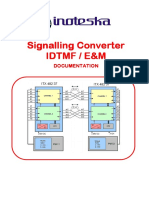
- Signalling Converter Signalling Converter Signalling Converter Signalling Converter Idtmf / E&M Idtmf / E&M Idtmf / E&M Idtmf / E&MDokument15 SeitenSignalling Converter Signalling Converter Signalling Converter Signalling Converter Idtmf / E&M Idtmf / E&M Idtmf / E&M Idtmf / E&MArmanul HaqueNoch keine Bewertungen
- Touch Sensitive Alarm Circuit Using 555 Timer ICDokument5 SeitenTouch Sensitive Alarm Circuit Using 555 Timer ICrockettrooper21Noch keine Bewertungen
- Smart Lighting Centralized Controller: Technical SpecificationDokument9 SeitenSmart Lighting Centralized Controller: Technical SpecificationSamar YoussefNoch keine Bewertungen
- Tecnord Catalogo-SensoresDokument13 SeitenTecnord Catalogo-SensoresterwanfrotarjNoch keine Bewertungen
- RT-300 Industrial JoystickDokument13 SeitenRT-300 Industrial JoystickRunnTechNoch keine Bewertungen
- Controller HC320: Technical InformationDokument2 SeitenController HC320: Technical InformationYudi SahlaNoch keine Bewertungen
- 2.19 Sound Sensor ModuleDokument4 Seiten2.19 Sound Sensor ModuleJázmin SzilágyiNoch keine Bewertungen
- Universal Temperature Converter KFD2-UT2-2: FunctionDokument4 SeitenUniversal Temperature Converter KFD2-UT2-2: FunctionAlamsyah SyamsuddinNoch keine Bewertungen
- Datasheet Amp Meter AutonicsDokument9 SeitenDatasheet Amp Meter AutonicsArifin Jr.Noch keine Bewertungen
- LMC2015-LMCV4-FIBER-M Card Instructions 2020.05.21Dokument11 SeitenLMC2015-LMCV4-FIBER-M Card Instructions 2020.05.21Battery ToolsNoch keine Bewertungen
- 06.04.202 - MAXI MW 8 30 - enDokument4 Seiten06.04.202 - MAXI MW 8 30 - enAgus PrasetioNoch keine Bewertungen
- MID163-FL-FE-Edicion 1Dokument20 SeitenMID163-FL-FE-Edicion 1Elifio Cortes MazaNoch keine Bewertungen
- Rack Hoist Controller: RMC12, RMC8Dokument12 SeitenRack Hoist Controller: RMC12, RMC8محمد جنديNoch keine Bewertungen
- Four Way Tracking Car TutorialDokument26 SeitenFour Way Tracking Car Tutorialvadym_kovalenko4166Noch keine Bewertungen
- Transformer Differential RelayDokument12 SeitenTransformer Differential Relaysandyarajagopalan321Noch keine Bewertungen
- Clap Switch: New CircuitsDokument8 SeitenClap Switch: New Circuitsarmaan_14Noch keine Bewertungen
- Mcp9600-E MXDokument50 SeitenMcp9600-E MXGuilherme Schultz GonçalvesNoch keine Bewertungen
- Lx3v 2ad2da BDDokument6 SeitenLx3v 2ad2da BDRanaIfteeNoch keine Bewertungen
- Electrical Components LocationDokument4 SeitenElectrical Components LocationJassetps Iair Sosa PachecoNoch keine Bewertungen
- Embeded Lab SessionalDokument14 SeitenEmbeded Lab SessionalSyed rohanNoch keine Bewertungen
- Jumpflex: 857-423 Signal ConditionersDokument2 SeitenJumpflex: 857-423 Signal ConditionersRodrigoBurgosNoch keine Bewertungen
- Hdben21Dokument24 SeitenHdben21mick armenagNoch keine Bewertungen
- OSN 8800 6800 3800 V100R011C00 Alarms and Performance Events Reference 01Dokument1.544 SeitenOSN 8800 6800 3800 V100R011C00 Alarms and Performance Events Reference 01Oscar Behrens ZepedaNoch keine Bewertungen
- Methods of ResearchDokument12 SeitenMethods of ResearchArt Angel GingoNoch keine Bewertungen
- ADAMDokument12 SeitenADAMreyNoch keine Bewertungen
- Hi Smith, Learn About US Sales Tax ExemptionDokument2 SeitenHi Smith, Learn About US Sales Tax Exemptionsmithmvuama5Noch keine Bewertungen
- Sarah Williams CVDokument2 SeitenSarah Williams CVsarahcwilliamsNoch keine Bewertungen
- Deploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013Dokument22 SeitenDeploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013cilango1Noch keine Bewertungen
- Thermo King Tool Catalog Part 2Dokument53 SeitenThermo King Tool Catalog Part 2Alb NewgateNoch keine Bewertungen
- Motion To DismissDokument24 SeitenMotion To DismisssandyemerNoch keine Bewertungen
- DX225LCA DX340LCA Sales MaterialDokument46 SeitenDX225LCA DX340LCA Sales MaterialAntonio Carrion100% (9)
- Muhammad Safuan Othman (CD 4862)Dokument24 SeitenMuhammad Safuan Othman (CD 4862)Andy100% (1)
- What Is SAP PS (Project Systems) ModuleDokument3 SeitenWhat Is SAP PS (Project Systems) ModuleahmerNoch keine Bewertungen
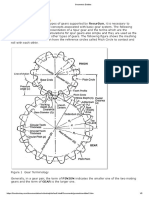
- Geometric Entities: Basic Gear TerminologyDokument5 SeitenGeometric Entities: Basic Gear TerminologyMatija RepincNoch keine Bewertungen
- Discovering Computers 2016: Operating SystemsDokument34 SeitenDiscovering Computers 2016: Operating SystemsAnonymous gNHrb0sVYNoch keine Bewertungen
- Fashion Designing Sample Question Paper1Dokument3 SeitenFashion Designing Sample Question Paper1Aditi VermaNoch keine Bewertungen
- 1 General: Fig. 1.1 Industrial RobotDokument40 Seiten1 General: Fig. 1.1 Industrial RobotArunNoch keine Bewertungen
- Details For Order #002 5434861 1225038: Not Yet ShippedDokument1 SeiteDetails For Order #002 5434861 1225038: Not Yet ShippedSarai NateraNoch keine Bewertungen
- Rectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadDokument3 SeitenRectangular Wire Die Springs ISO-10243 Standard: Red Colour Heavy LoadbashaNoch keine Bewertungen
- Lab ManualDokument15 SeitenLab ManualsamyukthabaswaNoch keine Bewertungen
- Medicinal Chemistry-Ii: 1.anti-Infective Agents: FDokument14 SeitenMedicinal Chemistry-Ii: 1.anti-Infective Agents: FAnonymous ionOPaqlkNoch keine Bewertungen
- People/Occupancy Rules of Thumb: Bell - Ch10.indd 93 8/17/07 10:39:31 AMDokument8 SeitenPeople/Occupancy Rules of Thumb: Bell - Ch10.indd 93 8/17/07 10:39:31 AMPola OsamaNoch keine Bewertungen
- Presentation The New Condominium Rules 9 1 2018 PDFDokument35 SeitenPresentation The New Condominium Rules 9 1 2018 PDFYe AungNoch keine Bewertungen
- Preventive Maintenance Checklist: Tool Room & Production SawsDokument2 SeitenPreventive Maintenance Checklist: Tool Room & Production SawsValerio Ambrocio IsmaelNoch keine Bewertungen
- Emancipation Fact SheetDokument2 SeitenEmancipation Fact SheetKeelie SmithNoch keine Bewertungen
- Poverty Eradication Cluster HLPF Position Paper With Case StudiesDokument4 SeitenPoverty Eradication Cluster HLPF Position Paper With Case StudiesJohn Paul Demonteverde ElepNoch keine Bewertungen
- Annex 1C - Ice Plant and Cold Storage Inspection ChecklistDokument9 SeitenAnnex 1C - Ice Plant and Cold Storage Inspection ChecklistMaxmore Karumamupiyo100% (2)
- How To Configure VFD - General - Guides & How-Tos - CoreELEC ForumsDokument13 SeitenHow To Configure VFD - General - Guides & How-Tos - CoreELEC ForumsJemerald MagtanongNoch keine Bewertungen
- Partnership Law (Chapter 1 and 2) - ReviewerDokument9 SeitenPartnership Law (Chapter 1 and 2) - ReviewerJeanne Marie0% (1)
- British Forces in 2nd Battle of AlameinDokument10 SeitenBritish Forces in 2nd Battle of AlameinDinko Odak100% (1)
- Wi-Fi Planning and Design Questionnaire 2.0Dokument12 SeitenWi-Fi Planning and Design Questionnaire 2.0Free Space67% (3)
- Tamil Nadu Industrial Establishments (Conferment of Permanent Status To Workman Act, 1981Dokument12 SeitenTamil Nadu Industrial Establishments (Conferment of Permanent Status To Workman Act, 1981Latest Laws TeamNoch keine Bewertungen