Das könnte Ihnen auch gefallen
- Contemporary Anaesthetic Equipments.: An Aid for Healthcare ProfessionalsVon EverandContemporary Anaesthetic Equipments.: An Aid for Healthcare ProfessionalsNoch keine Bewertungen
- Environmental Scenario in Indian Mining Industry - an OverviewVon EverandEnvironmental Scenario in Indian Mining Industry - an OverviewNoch keine Bewertungen
- Cover Long ReportDokument1 SeiteCover Long ReportkritharanaNoch keine Bewertungen
- P-5000T - Loop Folder PDFDokument15 SeitenP-5000T - Loop Folder PDFSrikant SuruNoch keine Bewertungen
- Skill 6: Connect and Operate Alarms On A Honeywell Udc 3500 ControllerDokument7 SeitenSkill 6: Connect and Operate Alarms On A Honeywell Udc 3500 Controllerjenixson tamondongNoch keine Bewertungen
- Universiti Teknologi Mara Fakulti Kejuruteraan Kimia Reservoir & Gas Laboratory (CGE 617)Dokument8 SeitenUniversiti Teknologi Mara Fakulti Kejuruteraan Kimia Reservoir & Gas Laboratory (CGE 617)Satiah WahabNoch keine Bewertungen
- Plug Flow Reactor Experiment ReportDokument25 SeitenPlug Flow Reactor Experiment ReportCesarah Cabungcal100% (1)
- EXE 15.048 - L.S.01 Load Test Specifications - Index 1Dokument9 SeitenEXE 15.048 - L.S.01 Load Test Specifications - Index 1Kara BacNoch keine Bewertungen
- Diagram 1Dokument5 SeitenDiagram 1Cristofer2Noch keine Bewertungen
- CDB3072 - Jan 2020 - Extended Assignment (B)Dokument3 SeitenCDB3072 - Jan 2020 - Extended Assignment (B)Alya BatrisyiaNoch keine Bewertungen
- 2019 Toyota Corolla 2.0L Eng VIN 4 SEDokument220 Seiten2019 Toyota Corolla 2.0L Eng VIN 4 SEalex acuña cordovaNoch keine Bewertungen
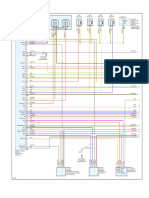
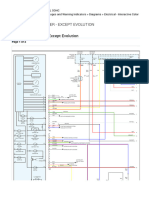
- Color Schematics Engine Controls 1 6l 1 of 4Dokument1 SeiteColor Schematics Engine Controls 1 6l 1 of 4fernandoNoch keine Bewertungen
- (3rz-Fe) Engine ControlDokument11 Seiten(3rz-Fe) Engine ControlJhon Sanchez Lopez100% (1)
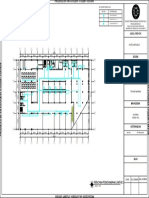
- Judul Proyek: Rencana Penghawaan Ground FloorDokument1 SeiteJudul Proyek: Rencana Penghawaan Ground FloorCeramah SingkatNoch keine Bewertungen
- Portfolio (All Mining & Non-Mining Projects) : Subsidiary Project TypeDokument1 SeitePortfolio (All Mining & Non-Mining Projects) : Subsidiary Project TypeCIL PSNoch keine Bewertungen
- Judul Proyek: Rencana Penghawaan Lantai 2Dokument1 SeiteJudul Proyek: Rencana Penghawaan Lantai 2Ceramah SingkatNoch keine Bewertungen
- Engineering Building Ground Floor PlanDokument4 SeitenEngineering Building Ground Floor PlanBenjamin Jacob Jr.Noch keine Bewertungen
- Cib 14434Dokument5 SeitenCib 14434Kakooza RojaNoch keine Bewertungen
- Sae J215-2002Dokument13 SeitenSae J215-2002tiramisuweitaoNoch keine Bewertungen
- MFI control system circuit diagramDokument2 SeitenMFI control system circuit diagramSteven Ledesma100% (1)
- 3050-Spare Parts02Dokument18 Seiten3050-Spare Parts02irwanafriaNoch keine Bewertungen
- Comptector & Chiller (Cdu) Controller (Fx32C Series) : Precaution For UseDokument5 SeitenComptector & Chiller (Cdu) Controller (Fx32C Series) : Precaution For UseFcma0903100% (1)
- TIIDA SánchezDokument6 SeitenTIIDA SánchezJesus SanchezNoch keine Bewertungen
- Armfield PCT53 Datasheet V2a - WebDokument2 SeitenArmfield PCT53 Datasheet V2a - WebADESTI PURNAMA SARINoch keine Bewertungen
- Ecm 1.5l 2 de 3Dokument2 SeitenEcm 1.5l 2 de 3Felix VelasquezNoch keine Bewertungen
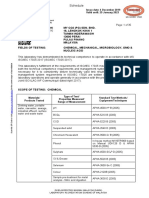
- ISO/IEC 17025 Accredited Chemical and Microbiology Testing ScheduleDokument16 SeitenISO/IEC 17025 Accredited Chemical and Microbiology Testing ScheduleediasianagriNoch keine Bewertungen
- CHE506 - Lab Report On Plug Flow ReactorDokument25 SeitenCHE506 - Lab Report On Plug Flow Reactorfiorella50% (2)
- Process Control Laboratory: Section of Chemical Process Malaysian Intitute of Chemical & Bioengineering TechnologyDokument16 SeitenProcess Control Laboratory: Section of Chemical Process Malaysian Intitute of Chemical & Bioengineering Technology9xqyk4dpwbNoch keine Bewertungen
- 25301916297Dokument3 Seiten25301916297Automation WorksNoch keine Bewertungen
- Maintenance Central Workshop Result Inspection ElectricalDokument6 SeitenMaintenance Central Workshop Result Inspection ElectricalMuhammad ArifinNoch keine Bewertungen
- Instrument Cluster 06 LDokument3 SeitenInstrument Cluster 06 Ljohn luis MoralesNoch keine Bewertungen
- Cruise Control (5VZ-FE)Dokument6 SeitenCruise Control (5VZ-FE)Esteban LefontNoch keine Bewertungen
- Engine Controls VOLVO 2006Dokument5 SeitenEngine Controls VOLVO 2006Rogelio ArenasNoch keine Bewertungen
- Manual For SP1 7890-0552 PDFDokument30 SeitenManual For SP1 7890-0552 PDFvzimak2355Noch keine Bewertungen
- Service Letter Z26-1: ZEE Systems, IncDokument6 SeitenService Letter Z26-1: ZEE Systems, IncProvincial AirwaysNoch keine Bewertungen
- SD313 5 MFI Control System (G4HE/G4HG: EPSILON 1.0L/1.1L M/T)Dokument1 SeiteSD313 5 MFI Control System (G4HE/G4HG: EPSILON 1.0L/1.1L M/T)Huy Trần Quốc100% (1)
- Manual 305507001-3050-Olv-Zine-1-Division-1-Sample-System-Manual-SupplementDokument14 SeitenManual 305507001-3050-Olv-Zine-1-Division-1-Sample-System-Manual-Supplementds6219682Noch keine Bewertungen
- SAMM 384 ScheduleDokument25 SeitenSAMM 384 ScheduleediasianagriNoch keine Bewertungen
- SD313 24 Engine Control System (D4BH: 4D56 TCI 2.5L) (4) : F5 10A F13 10A F20 10ADokument1 SeiteSD313 24 Engine Control System (D4BH: 4D56 TCI 2.5L) (4) : F5 10A F13 10A F20 10AhaiderNoch keine Bewertungen
- Refrigerant recovery system operating instructionsDokument24 SeitenRefrigerant recovery system operating instructionsИгорьNoch keine Bewertungen
- A 14 Miss Rules RationaleDokument262 SeitenA 14 Miss Rules RationalefernandoNoch keine Bewertungen
- Simulation and Optimization of Ethyl Acetate Reactive Packed Distillation Process Using Aspen HysysDokument8 SeitenSimulation and Optimization of Ethyl Acetate Reactive Packed Distillation Process Using Aspen HysysAbdelSamed MohamedNoch keine Bewertungen
- 4 AlarmpointsDokument5 Seiten4 AlarmpointsAngel RomeroNoch keine Bewertungen
- Experiment 4 Group 4Dokument23 SeitenExperiment 4 Group 4amirul ashrafNoch keine Bewertungen
- GHS Fans FDS Rev0 23-12-2022Dokument27 SeitenGHS Fans FDS Rev0 23-12-2022Ranjith KumarNoch keine Bewertungen
- F125 8009 Hydraulic Diagram RigDokument1 SeiteF125 8009 Hydraulic Diagram RigmcprevencionchileNoch keine Bewertungen
- Quality control report summarizes engine testsDokument1 SeiteQuality control report summarizes engine testsjulio buitragoNoch keine Bewertungen
- OCMA 500 550 Brochure HRE1941A Uploaded On 20141020 PDFDokument6 SeitenOCMA 500 550 Brochure HRE1941A Uploaded On 20141020 PDFAnonymous FuriuyxP4Noch keine Bewertungen
- 351 Pri Power ConDokument1 Seite351 Pri Power ConNathan BukoskiNoch keine Bewertungen
- Excon 2018 CatalogoDokument70 SeitenExcon 2018 CatalogoManuel Padilla ChirreNoch keine Bewertungen
- Laboratory Accreditation ScheduleDokument35 SeitenLaboratory Accreditation ScheduleediasianagriNoch keine Bewertungen
- Multivariable Control SystemDokument21 SeitenMultivariable Control SystemFforever'Yee ChengNoch keine Bewertungen
- Operation Instruction of PSA UnitDokument83 SeitenOperation Instruction of PSA UnitAbassyacoubouNoch keine Bewertungen
- General Installation Notes: Bell 407 Rotorcraft Installation, G500H SystemDokument39 SeitenGeneral Installation Notes: Bell 407 Rotorcraft Installation, G500H SystemJudhi C ArdyantoNoch keine Bewertungen
- Skill 7: Connect and Operate Discrete Inputs On A Honeywell Udc 3500 ControllerDokument8 SeitenSkill 7: Connect and Operate Discrete Inputs On A Honeywell Udc 3500 Controllerjenixson tamondongNoch keine Bewertungen
- Preventive Maintenance Mold and Machine General Overview RGBDokument7 SeitenPreventive Maintenance Mold and Machine General Overview RGBJull Breiner HernandezNoch keine Bewertungen
- ISTEC 2011: Simulation and Optimization of Ethyl Acetate Reactive Packed Distillation Process Using Aspen HysysDokument6 SeitenISTEC 2011: Simulation and Optimization of Ethyl Acetate Reactive Packed Distillation Process Using Aspen HysysAbdulwahab GIWANoch keine Bewertungen
- Remote Control Guide for Air ConditionerDokument8 SeitenRemote Control Guide for Air ConditionerCarlos PONTET JOURDANNoch keine Bewertungen
- 2006-03-13 DR2 SummaryDokument2 Seiten2006-03-13 DR2 SummaryZach EdwardsNoch keine Bewertungen
- Expt. 4 - Pressure ControlDokument16 SeitenExpt. 4 - Pressure Controlpleco4meNoch keine Bewertungen
- Environmentally-Friendly LPG Forklift Trucks with Superior Power & PerformanceDokument5 SeitenEnvironmentally-Friendly LPG Forklift Trucks with Superior Power & PerformanceCarlos Miguel Apipilhuasco GonzálezNoch keine Bewertungen
- Library Management System Project ReportDokument50 SeitenLibrary Management System Project ReportSURAJ GAMINGNoch keine Bewertungen
- Budget EstimatesDokument251 SeitenBudget EstimatesMUHAMMAD QASIM RAJPARNoch keine Bewertungen
- DH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsDokument2 SeitenDH3E-L-SC-A3-K-170329-0009 Commissioning Inspection & Test Plan (ITP) For BOP and Associated Test FormsBình Quách HảiNoch keine Bewertungen
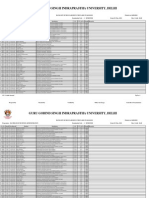
- Ranking 4Dokument34 SeitenRanking 4Deepti BhatiaNoch keine Bewertungen
- Project Vision DocumentDokument5 SeitenProject Vision DocumentorjuanNoch keine Bewertungen
- YEZ-Conical Brake MotorDokument3 SeitenYEZ-Conical Brake MotorMech MallNoch keine Bewertungen
- Saudi Arabia Power StationDokument108 SeitenSaudi Arabia Power StationEhab HarbNoch keine Bewertungen
- Brigada Eskwela Activities With PicsDokument6 SeitenBrigada Eskwela Activities With PicsCharisse TocmoNoch keine Bewertungen
- KSB Megaflow V: Pumps For Sewage, Effuents and MisturesDokument18 SeitenKSB Megaflow V: Pumps For Sewage, Effuents and MisturesKorneliusNoch keine Bewertungen
- PLCDokument16 SeitenPLCMohit Kinger100% (1)
- Attachment To Division Memorandum No. - , S, 2020Dokument3 SeitenAttachment To Division Memorandum No. - , S, 2020Jasmin Move-RamirezNoch keine Bewertungen
- 38.11 Cum Total Qty of 4 Nos. Culvests 38.11x4 152.43 CumDokument14 Seiten38.11 Cum Total Qty of 4 Nos. Culvests 38.11x4 152.43 CumMandeep SinghNoch keine Bewertungen
- Associating Numbers With Sets Having 51 Up To 100 Objects or ThingsDokument4 SeitenAssociating Numbers With Sets Having 51 Up To 100 Objects or ThingssweetienasexypaNoch keine Bewertungen
- Chap1-Geometrical Optics - ExercisesDokument3 SeitenChap1-Geometrical Optics - ExercisesReema HlohNoch keine Bewertungen
- Pink Fun Doodles and Blobs Math Online Class Creative Presentation SlidesCarnivalDokument28 SeitenPink Fun Doodles and Blobs Math Online Class Creative Presentation SlidesCarnivalraine castorNoch keine Bewertungen
- Sanju MT 799 PT Swi 100kDokument2 SeitenSanju MT 799 PT Swi 100kSumantri On LineNoch keine Bewertungen
- SEO ProposalDokument5 SeitenSEO ProposalShivdev SaiNoch keine Bewertungen
- August 2017Dokument72 SeitenAugust 2017Treatment Plant Operator MagazineNoch keine Bewertungen
- Tutorial Ip 2 Win EnglishDokument25 SeitenTutorial Ip 2 Win EnglishGarry Zein0% (1)
- System Engineering Management Plan (SEMPDokument2 SeitenSystem Engineering Management Plan (SEMPKatie WestNoch keine Bewertungen
- Nec 2006Dokument59 SeitenNec 2006loots69Noch keine Bewertungen
- OkDokument29 SeitenOkgouthamlabsNoch keine Bewertungen
- 3P61 Service Manual PDFDokument17 Seiten3P61 Service Manual PDFgulaab786Noch keine Bewertungen
- Audio (Amplifier) - Electrical DiagnosticsDokument195 SeitenAudio (Amplifier) - Electrical DiagnosticsRafael CherechesNoch keine Bewertungen
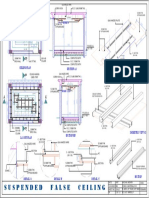
- Gypsum Ceiling PDFDokument1 SeiteGypsum Ceiling PDFAanchal Mishra100% (1)
- D72140GC10 46777 UsDokument3 SeitenD72140GC10 46777 UsWilliam LeeNoch keine Bewertungen
- Basic Computer ConceptsDokument77 SeitenBasic Computer ConceptsJerry Mugambi100% (1)
- MyPower S3220&S3320-INSTALLATIONDokument83 SeitenMyPower S3220&S3320-INSTALLATIONJorge GonzalesNoch keine Bewertungen