Das könnte Ihnen auch gefallen
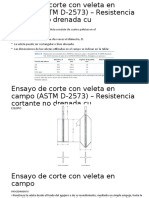
- Ensayo de Corte Con Veleta en CampoDokument21 SeitenEnsayo de Corte Con Veleta en CampoCristhian Alberto Gómez100% (1)
- 01 Formato de Tesis y Trabajo de Investigación de BachilleratoDokument27 Seiten01 Formato de Tesis y Trabajo de Investigación de BachilleratoCristhian Alberto GómezNoch keine Bewertungen
- Niv AbiertaDokument1 SeiteNiv AbiertaCristhian Alberto GómezNoch keine Bewertungen
- Plan de Seguridad y Salud en El TrabajoDokument20 SeitenPlan de Seguridad y Salud en El TrabajoCristhian Alberto GómezNoch keine Bewertungen
- Plan de Seguridad y Salud en El TrabajoDokument20 SeitenPlan de Seguridad y Salud en El TrabajoCristhian Alberto GómezNoch keine Bewertungen
- HedonismoDokument1 SeiteHedonismoCristhian Alberto GómezNoch keine Bewertungen
- Optimizacion de Consumo de Agua en Servicios HigienicosDokument2 SeitenOptimizacion de Consumo de Agua en Servicios HigienicosCristhian Alberto Gómez100% (1)
- Representantes de La Arquitectura MedievalDokument7 SeitenRepresentantes de La Arquitectura MedievalCristhian Alberto GómezNoch keine Bewertungen
- Representantes de La Arquitectura MedievalDokument7 SeitenRepresentantes de La Arquitectura MedievalCristhian Alberto GómezNoch keine Bewertungen
- Miedo Al 13Dokument5 SeitenMiedo Al 13Cristhian Alberto GómezNoch keine Bewertungen
- Amos A ExplicarteDokument16 SeitenAmos A ExplicarteDanilo joseNoch keine Bewertungen
- 02 - Vibración LibreDokument22 Seiten02 - Vibración LibreSHARICK MELISA VIDES QUINTERONoch keine Bewertungen
- Matematica Ingreso Fceqyn 2024Dokument113 SeitenMatematica Ingreso Fceqyn 2024basilukmiguel55Noch keine Bewertungen
- MR TP 300Dokument7 SeitenMR TP 300Maria Edilia Sanchez DE PerezNoch keine Bewertungen
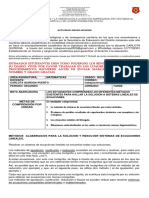
- Actividad Grado Noveno (1) SegundoDokument4 SeitenActividad Grado Noveno (1) Segundodiana pinzonNoch keine Bewertungen
- Guia Teoria Practica 11Dokument12 SeitenGuia Teoria Practica 11ALER CANAQUIRI CAINAMARINoch keine Bewertungen
- Actividad 1Dokument8 SeitenActividad 1Màùrõ Vąlęnçįã100% (1)
- Utilización de La Aplicación Geogebra para El Desarrollo de Las Ecuaciones LinealesDokument14 SeitenUtilización de La Aplicación Geogebra para El Desarrollo de Las Ecuaciones LinealesDAVIS CALLENoch keine Bewertungen
- Tema 1Dokument9 SeitenTema 1Sara CarrilloNoch keine Bewertungen
- Simulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria QuimicaDokument32 SeitenSimulacion de Procesos Quimicos: Universidad Nacional Del Altiplano Facultad de Ingenieria Quimicaelia melayde rosello ccasaNoch keine Bewertungen
- Geometria Analitica La RectaDokument4 SeitenGeometria Analitica La RectaAnthony Panduro100% (1)
- Planeacion 3ro Ecuaciones 2doDokument16 SeitenPlaneacion 3ro Ecuaciones 2doLucas Hijar VillalobosNoch keine Bewertungen
- Criterio de EstabilidadDokument5 SeitenCriterio de Estabilidadjohanr432Noch keine Bewertungen
- Leyes de Semejanza en VentiladoresDokument6 SeitenLeyes de Semejanza en VentiladoresCarlos Alberto RodriguezNoch keine Bewertungen
- Metodo GaussDokument3 SeitenMetodo GaussKevin JeansNoch keine Bewertungen
- Cuadernillo 8 - Isometría, Ecuac Cuadrática, Cuerpos Geom y FuncionesDokument80 SeitenCuadernillo 8 - Isometría, Ecuac Cuadrática, Cuerpos Geom y FuncionesIam GallanoNoch keine Bewertungen
- Manual de Practicas de Metodos Numericos SCC - 1017 (2015)Dokument57 SeitenManual de Practicas de Metodos Numericos SCC - 1017 (2015)Mti Ulises Girón Jiménez100% (2)
- Ejerciocios Ecuaciones DiferencialesDokument3 SeitenEjerciocios Ecuaciones DiferencialesAntonio RomeroNoch keine Bewertungen
- 2023 - Bloque 2 - Sistemas de EcuacionesDokument31 Seiten2023 - Bloque 2 - Sistemas de EcuacionesmattNoch keine Bewertungen
- Tarea 2 - Tomas Rojas - Retroalimentación.Dokument7 SeitenTarea 2 - Tomas Rojas - Retroalimentación.Tanhy JrNoch keine Bewertungen
- 1er Tarea de Investigacion Calculo 3 Elian Perez Nivar 2-22-6911Dokument13 Seiten1er Tarea de Investigacion Calculo 3 Elian Perez Nivar 2-22-6911K5kiloNoch keine Bewertungen
- AM Espacio KDokument41 SeitenAM Espacio KAníbal J. Morillo100% (4)
- X - P - 6ºgrado - S1 - Ecuaciones de Primer Grado IDokument8 SeitenX - P - 6ºgrado - S1 - Ecuaciones de Primer Grado IAlex CristóbalNoch keine Bewertungen
- 6 - 10mo - aPLICACIONES DE LA ECUACION DE SEGUNDO GRADO.Dokument34 Seiten6 - 10mo - aPLICACIONES DE LA ECUACION DE SEGUNDO GRADO.Gonzalo OñateNoch keine Bewertungen
- ContenidosDokument4 SeitenContenidosYeison durangoNoch keine Bewertungen
- Act EvidenciaDokument11 SeitenAct EvidenciaJosé D. JesúsNoch keine Bewertungen
- 6G EcuacionesDokument9 Seiten6G EcuacionesCinthia Zuley Galán HolguínNoch keine Bewertungen