Das könnte Ihnen auch gefallen
- Compte Rendu CollisionsDokument9 SeitenCompte Rendu CollisionsVladimir SavuNoch keine Bewertungen
- Compte Rendue FocométrieDokument9 SeitenCompte Rendue FocométrieMagdalenaEL33% (3)
- TP Le Prisme OptiqueDokument12 SeitenTP Le Prisme Optiqueninqt100% (6)
- Compte-Rendu TP Effet PhotoélectriqueDokument3 SeitenCompte-Rendu TP Effet PhotoélectriqueYouness Oulmouden100% (7)
- TP Oscilloscope CathodiqueDokument6 SeitenTP Oscilloscope CathodiqueAristide DOSSOU50% (4)
- TP Focometrie CorrectionDokument8 SeitenTP Focometrie CorrectionSaraEA100% (2)
- Tp2 OptiqueDokument13 SeitenTp2 Optiquehayat KIRATENoch keine Bewertungen
- Compte Rendu TP ElectrocinétiqueDokument6 SeitenCompte Rendu TP ElectrocinétiqueSafia Garrouj100% (1)
- Travaux Pratiques D'optique: Faculté Des Sciences D'OrsayDokument40 SeitenTravaux Pratiques D'optique: Faculté Des Sciences D'OrsayAlain Geoffroy100% (1)
- TP Champ Et Potentiel ElectriqueDokument6 SeitenTP Champ Et Potentiel ElectriqueSarah Charmante67% (9)
- Thermodynamique TP 1 CompteDokument5 SeitenThermodynamique TP 1 Comptemayssam benmim100% (2)
- TP 3 - Le Microscope Optique-1Dokument5 SeitenTP 3 - Le Microscope Optique-1Chaouki Lakehal80% (5)
- TP Physique N°02Dokument8 SeitenTP Physique N°02Mallek DjelabNoch keine Bewertungen
- Exercice Corrigés Miroirs Et Dioptres PlansDokument14 SeitenExercice Corrigés Miroirs Et Dioptres PlansEmmanuel Emma Ndikuryayo100% (1)
- TP 04 Pendule de TorsionDokument4 SeitenTP 04 Pendule de Torsionfati78% (18)
- TP 2 Interferences Lumineuses Enonce Et CorrectionDokument5 SeitenTP 2 Interferences Lumineuses Enonce Et CorrectionEliou100% (1)
- TP 8 - Oscillations Dans Un Circuit RLC - Correction PDFDokument5 SeitenTP 8 - Oscillations Dans Un Circuit RLC - Correction PDFfrancis3ndourNoch keine Bewertungen
- TP Electricité, BobineDokument4 SeitenTP Electricité, Bobineovoxodonjuan90% (10)
- Vibration TP N°.1 Pendule de TorsionDokument8 SeitenVibration TP N°.1 Pendule de TorsionMahmoud Kerrouch100% (3)
- Correction TP FocometrieDokument4 SeitenCorrection TP Focometrieabc100% (1)
- TP Goniometre CorrectionDokument4 SeitenTP Goniometre CorrectionMatthieu Caron100% (7)
- TP1 - Focomètrie - Méthode Des Points ConjuguésDokument5 SeitenTP1 - Focomètrie - Méthode Des Points Conjuguésشوقي لكحلNoch keine Bewertungen
- Lentille ConvergenteDokument8 SeitenLentille ConvergenteTesnime JemmaziNoch keine Bewertungen
- TP FocométrieDokument3 SeitenTP FocométrieSari Bounazef100% (2)
- TP OptiqueGeometriqueL1S2Dokument8 SeitenTP OptiqueGeometriqueL1S2Simo AchaàlNoch keine Bewertungen
- TP1 Reflexion RefractionDokument3 SeitenTP1 Reflexion Refractionfafoulol100% (2)
- Ob 0956ec Focometrie Des Lentilles Minces ConvergentesDokument5 SeitenOb 0956ec Focometrie Des Lentilles Minces ConvergentesAyou HamNoch keine Bewertungen
- Compte Rendu: TP - Polarisation Optique OndulatoireDokument10 SeitenCompte Rendu: TP - Polarisation Optique OndulatoirenmiliNoch keine Bewertungen
- Détermination de La Constante de PlanckDokument6 SeitenDétermination de La Constante de PlanckSALMA FITRINoch keine Bewertungen
- 11-Méthode de Badal Sliberman Bessel CorrectionDokument8 Seiten11-Méthode de Badal Sliberman Bessel CorrectionAziz BenamorNoch keine Bewertungen
- Les Chocs TP 10Dokument9 SeitenLes Chocs TP 10Hamza BoutlihNoch keine Bewertungen
- TP OptiqueDokument31 SeitenTP OptiqueRim Harfouch100% (3)
- TP Physique N - 01 - 2 - PDFDokument8 SeitenTP Physique N - 01 - 2 - PDFanon_998340507Noch keine Bewertungen
- Pendule de Torsion TPe PDFDokument3 SeitenPendule de Torsion TPe PDFSalah Berrhou100% (1)
- Ouvrir Ici 1 2 PDFDokument42 SeitenOuvrir Ici 1 2 PDFOUSSAMA BOUTRIA100% (2)
- TP3 Diffraction CorrectionDokument3 SeitenTP3 Diffraction CorrectionAyou HamNoch keine Bewertungen
- TP N°3 (Circuit RLC)Dokument8 SeitenTP N°3 (Circuit RLC)abderrahmane laabailNoch keine Bewertungen
- Compte Rendu TP Optique Groupe A22Dokument37 SeitenCompte Rendu TP Optique Groupe A22princemarfo2151999Noch keine Bewertungen
- Rapport Optique 2Dokument11 SeitenRapport Optique 2Emmanuel Vianney100% (2)
- TP Aberration Dans Un Système OptiqueDokument5 SeitenTP Aberration Dans Un Système OptiqueSari BounazefNoch keine Bewertungen
- Compte Rendu Du TP 2: Détermination de La Capacité de Sphères Métalliques, de Condensateurs Sphériques Et de La Constante DiélectriqueDokument13 SeitenCompte Rendu Du TP 2: Détermination de La Capacité de Sphères Métalliques, de Condensateurs Sphériques Et de La Constante Diélectriquekaoutarmo41Noch keine Bewertungen
- TP OptuqueDokument21 SeitenTP OptuqueJalal TiYal100% (1)
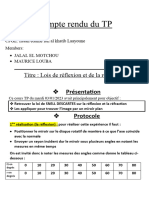
- Compte Rendu Du TPDokument4 SeitenCompte Rendu Du TPJalal ELMOTCHOUNoch keine Bewertungen
- L Oscilloscope CathodiqueDokument10 SeitenL Oscilloscope CathodiqueHassan OubassourNoch keine Bewertungen
- Interferences Lumineuses CoursDokument4 SeitenInterferences Lumineuses CoursSami Khouja0% (1)
- Série Optique Ondulatoire 2020-2021Dokument8 SeitenSérie Optique Ondulatoire 2020-2021Ahmed fattoumNoch keine Bewertungen
- Travaux-Diriges D'optique Physique Serie N°3Dokument24 SeitenTravaux-Diriges D'optique Physique Serie N°3Jalal TiYal100% (1)
- Compte Rendue de TP 3 PDF FinalDokument6 SeitenCompte Rendue de TP 3 PDF FinalDjilly FallNoch keine Bewertungen
- TD3 Structure - 12 - 13Dokument7 SeitenTD3 Structure - 12 - 13sidi mohamed el amine nekkal100% (1)
- Oscilloscope CathodiqueDokument5 SeitenOscilloscope Cathodiqueamy ndongNoch keine Bewertungen
- Travaux Pratique 3 de Chimie PDFDokument9 SeitenTravaux Pratique 3 de Chimie PDFBenouna Rajae Amina100% (1)
- TP 4 - Loi de NewtonDokument10 SeitenTP 4 - Loi de NewtonAbderrahmane100% (3)
- 4 Focometrie PTDokument2 Seiten4 Focometrie PTAYOUBelhamdaniNoch keine Bewertungen
- Pendule SimpleDokument18 SeitenPendule SimplePablo Emilio100% (1)
- TP2 - Fiche de SimulationsDokument14 SeitenTP2 - Fiche de Simulationsesmorad53100% (1)
- Bessel SilbermannDokument2 SeitenBessel SilbermannAchfakidine JaovitahermannNoch keine Bewertungen
- Corrige TD2Dokument5 SeitenCorrige TD2nainaNoch keine Bewertungen
- P 07 BB 1 CDokument10 SeitenP 07 BB 1 CMihnea GamanNoch keine Bewertungen
- Problème OptiqueDokument5 SeitenProblème OptiqueMaxwellNoch keine Bewertungen
- Cours Optique Partie 2Dokument13 SeitenCours Optique Partie 2fethi.bourasNoch keine Bewertungen
- Exposition Nous Les Arbres À La Fondation CartierDokument6 SeitenExposition Nous Les Arbres À La Fondation CartierJason WhittakerNoch keine Bewertungen
- Planning Examen Rattrapage Biochimie Mars 2020Dokument6 SeitenPlanning Examen Rattrapage Biochimie Mars 2020JoliaJjNoch keine Bewertungen
- Sable BentoniteDokument11 SeitenSable BentoniteSid AhmedNoch keine Bewertungen
- Guide Technique N°11Dokument84 SeitenGuide Technique N°11Anonymous LfeGI2hMNoch keine Bewertungen
- Le Guide Du Cultivateur de MarijuanaDokument75 SeitenLe Guide Du Cultivateur de Marijuanautilisateur84Noch keine Bewertungen
- INTRODUCTIONDokument5 SeitenINTRODUCTIONalan muzan100% (1)
- Impact de La Fracturation Sur Larchitect PDFDokument19 SeitenImpact de La Fracturation Sur Larchitect PDFbougheraraNoch keine Bewertungen
- Respiration PraniqueDokument2 SeitenRespiration PraniquesoriboNoch keine Bewertungen
- Le Design SensorielDokument2 SeitenLe Design SensorielLeakim MaëlNoch keine Bewertungen
- Genétique Des PopulationsDokument64 SeitenGenétique Des PopulationsHervé Perdry100% (1)
- Polycope de BADokument56 SeitenPolycope de BANabil holmesNoch keine Bewertungen
- Cardinaux Stephane - Geometries Sacrees Tome 2 PDFDokument285 SeitenCardinaux Stephane - Geometries Sacrees Tome 2 PDFDiana Diana100% (8)
- Le Chemin Liberateur de La Rose CroixDokument40 SeitenLe Chemin Liberateur de La Rose Croixkabballerodelagruta83% (6)
- 4 Fabrication Des Frittes Rôle Des MP Stratégiques Karine Sarrazy APEV Octobre 2014Dokument33 Seiten4 Fabrication Des Frittes Rôle Des MP Stratégiques Karine Sarrazy APEV Octobre 2014mohammedNoch keine Bewertungen
- Révisions SVTDokument2 SeitenRévisions SVTmichamazaNoch keine Bewertungen
- Etapes Pierre DelsucDokument169 SeitenEtapes Pierre DelsucFabio Cassanelli100% (2)
- CV Melbouci 2017Dokument20 SeitenCV Melbouci 2017Ingenieur100% (1)
- Cat Metkze PDFDokument71 SeitenCat Metkze PDFVincent OUEDRAOGONoch keine Bewertungen
- Le CubageDokument6 SeitenLe CubageMarwan ZoueinNoch keine Bewertungen
- Cruel Zelanda V-2 EditDokument63 SeitenCruel Zelanda V-2 EditDark_LetterNoch keine Bewertungen
- Forme de La TerreDokument7 SeitenForme de La TerreAbdellah EL Ansari100% (1)
- Structure Comportement PDFDokument288 SeitenStructure Comportement PDFRafael LinkNoch keine Bewertungen
- Harun Yahya - Connaitre Dieu Par La Raison - French From Turki By-Ai@hotmailDokument175 SeitenHarun Yahya - Connaitre Dieu Par La Raison - French From Turki By-Ai@hotmailme meNoch keine Bewertungen
- Genie CivilDokument96 SeitenGenie Civilعبد الوهاب بوشنةNoch keine Bewertungen
- Projet Fin Etude Route E92Dokument103 SeitenProjet Fin Etude Route E92Sou Ha100% (1)
- Michel Serres. Philosopher, C'est Anticiper - Entretiens, Histoire, Humanité, Création, Monde, Univers, Progrès, Technologie, Phénoménologie, Michel Serres - Philosophie MagazineDokument6 SeitenMichel Serres. Philosopher, C'est Anticiper - Entretiens, Histoire, Humanité, Création, Monde, Univers, Progrès, Technologie, Phénoménologie, Michel Serres - Philosophie MagazinetchulhaNoch keine Bewertungen
- Serie 2Dokument2 SeitenSerie 2Mimi MimiNoch keine Bewertungen
- Ch15 Force Mouvement SportDokument5 SeitenCh15 Force Mouvement Sporthakima032Noch keine Bewertungen
- Nature de La ParoleDokument7 SeitenNature de La ParoleestaranNoch keine Bewertungen