Das könnte Ihnen auch gefallen
- Examples of Improper Beam Plate ConnectivityDokument4 SeitenExamples of Improper Beam Plate ConnectivityPiv0terNoch keine Bewertungen
- DesignDokument44 SeitenDesignJames HermoNoch keine Bewertungen
- PurlinDokument19 SeitenPurlinLia Ame100% (2)
- AMERICAN WIDE FLANGE BEAMS: Dimensions and PropertiesDokument1 SeiteAMERICAN WIDE FLANGE BEAMS: Dimensions and PropertiesAek JayNoch keine Bewertungen
- Module-IV - Rectangular Water TanksDokument61 SeitenModule-IV - Rectangular Water TanksChinkuNoch keine Bewertungen
- LC1 - LC3 - LC2 - LC4 - LC5 - at The Base: Based On Section 203.3 of NSCP 2015 7th EditionDokument1 SeiteLC1 - LC3 - LC2 - LC4 - LC5 - at The Base: Based On Section 203.3 of NSCP 2015 7th EditionAly Arquillano JrNoch keine Bewertungen
- Wind Load Design NSCP 2015Dokument6 SeitenWind Load Design NSCP 2015MARKCHRISTMASNoch keine Bewertungen
- 5.3 Slab 5.3.1 Slab: Office Area: Ref. Calculation OutputDokument27 Seiten5.3 Slab 5.3.1 Slab: Office Area: Ref. Calculation OutputNH SyzlnNoch keine Bewertungen
- Reinforced Concrete Analysis and Design of Water TankDokument12 SeitenReinforced Concrete Analysis and Design of Water TankKrishna MurariNoch keine Bewertungen
- Moment Distribution MethodDokument5 SeitenMoment Distribution Methodchristophe0% (2)
- Two Way Slab ExampleDokument16 SeitenTwo Way Slab ExampleJason EdwardsNoch keine Bewertungen
- Wind Load Design NSCP 2015 PDFDokument6 SeitenWind Load Design NSCP 2015 PDF'Julius OrpiaNoch keine Bewertungen
- Loading For Structural Analysis - ManilaDokument30 SeitenLoading For Structural Analysis - ManilajayNoch keine Bewertungen
- Reinforced Concrete Design - One-Way SlabDokument2 SeitenReinforced Concrete Design - One-Way SlabRal GLNoch keine Bewertungen
- CE202 Structural AnalysisDokument3 SeitenCE202 Structural AnalysisBalagopal VNoch keine Bewertungen
- KANDING Loadings - NSCP 2015 - 2 Storey Residential Concrete StructureDokument23 SeitenKANDING Loadings - NSCP 2015 - 2 Storey Residential Concrete StructureNikka FerrerNoch keine Bewertungen
- Eiffel Tower TextDokument11 SeitenEiffel Tower TextAnca Rimniceanu100% (1)
- Prestressed Beam Analysis ExampleDokument7 SeitenPrestressed Beam Analysis ExampleHaymanAHMEDNoch keine Bewertungen
- Two-Way-Concrete-Slab-Floor-With-Drop-Panels-Design-Detailing 01-26-2018 PDFDokument81 SeitenTwo-Way-Concrete-Slab-Floor-With-Drop-Panels-Design-Detailing 01-26-2018 PDFBizimenyera Zenza TheonesteNoch keine Bewertungen
- Structural Design Criteria 1.0 Codes and StandardsDokument4 SeitenStructural Design Criteria 1.0 Codes and StandardsChrispin BarnigoNoch keine Bewertungen
- Continuous Beam AnalysisDokument42 SeitenContinuous Beam AnalysisMuhd MuqhreyNoch keine Bewertungen
- Multilevel Parking BLDG FINALDokument46 SeitenMultilevel Parking BLDG FINALMichael Bautista BaylonNoch keine Bewertungen
- TOWER ReportDokument67 SeitenTOWER ReportMUUTHUKRISHNAN100% (1)
- Method of Design - SLAB & BEAMDokument19 SeitenMethod of Design - SLAB & BEAMসামিউলইসলামNoch keine Bewertungen
- 06 ASEP-Qatar - Background of The Updates On The New NSCP 7th Edition - Frederick Francis Sison PDFDokument100 Seiten06 ASEP-Qatar - Background of The Updates On The New NSCP 7th Edition - Frederick Francis Sison PDFAlden CayagaNoch keine Bewertungen
- Secondary Consolidation Settlement Part 2 - AGUILOR (PPT Used)Dokument16 SeitenSecondary Consolidation Settlement Part 2 - AGUILOR (PPT Used)Kyohai RinggoNoch keine Bewertungen
- RC Design EC2Dokument70 SeitenRC Design EC2Picior Cristian100% (3)
- Truss Analysis and Design For Half Truss 3Dokument13 SeitenTruss Analysis and Design For Half Truss 3Bevelyn ManaloNoch keine Bewertungen
- A. Read The Following Book Chapters and Other Readings For ReferenceDokument4 SeitenA. Read The Following Book Chapters and Other Readings For ReferenceJomar LampitokNoch keine Bewertungen
- Analysis and Design of 4 Storey BuildingDokument8 SeitenAnalysis and Design of 4 Storey Buildingnhar15100% (1)
- Analysis and Design of DRBDokument13 SeitenAnalysis and Design of DRBACES JEEL CENDA�ANoch keine Bewertungen
- Analysis (Beam)Dokument62 SeitenAnalysis (Beam)Cypress Rovee FloresNoch keine Bewertungen
- Module 3 Lesson 3: Lateral Force Structure On Non-Building StructureDokument6 SeitenModule 3 Lesson 3: Lateral Force Structure On Non-Building StructureRich Lenard L. MagbooNoch keine Bewertungen
- Instantaneous Center of Rotation MethodDokument3 SeitenInstantaneous Center of Rotation MethodrammohanNoch keine Bewertungen
- Cont Beam DesignDokument76 SeitenCont Beam Designsiti HawaNoch keine Bewertungen
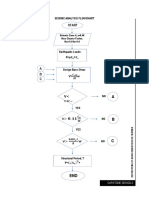
- Seismic Analysis FlowChartDokument1 SeiteSeismic Analysis FlowChartLerie Lou R. PenarroyoNoch keine Bewertungen
- Design of Concrete SlabDokument20 SeitenDesign of Concrete SlabDavis Chad MagalongNoch keine Bewertungen
- TRADE-OFF 1 Context 2Dokument7 SeitenTRADE-OFF 1 Context 2jerico habitanNoch keine Bewertungen
- Chapter 3: Computation: ND THDokument9 SeitenChapter 3: Computation: ND THpeachNoch keine Bewertungen
- Sample For A Design ProposalDokument7 SeitenSample For A Design ProposalSuresh Gunasekara100% (2)
- Winload Calculation NSCPDokument4 SeitenWinload Calculation NSCPAly Arquillano JrNoch keine Bewertungen
- Sample CE-3 (RCD) ComputationDokument12 SeitenSample CE-3 (RCD) ComputationJustine LedesmaNoch keine Bewertungen
- Module 3 Compression Members Lec #1Dokument5 SeitenModule 3 Compression Members Lec #1k. NotujNoch keine Bewertungen
- Bank BrochureDokument4 SeitenBank BrochureAjay AjayNoch keine Bewertungen
- Pp03a - Asep - NSCP 2015 Update On CH2 Minimum Design LoadsDokument40 SeitenPp03a - Asep - NSCP 2015 Update On CH2 Minimum Design LoadsjimNoch keine Bewertungen
- Chpt4Torsion in RCMembers (F) CDokument13 SeitenChpt4Torsion in RCMembers (F) CIsmail A Ismail100% (1)
- Eigen Modes - PDF Timesaving-Torsiondesign-Ia PDFDokument32 SeitenEigen Modes - PDF Timesaving-Torsiondesign-Ia PDFGeorge GeorgianNoch keine Bewertungen
- Calculation - Cainta 2 Storey Building - RetrofittingDokument58 SeitenCalculation - Cainta 2 Storey Building - Retrofittingregino abuzoNoch keine Bewertungen
- Earthquake Engineering - CE 232 Quiz Time Allowed: 1 HourDokument9 SeitenEarthquake Engineering - CE 232 Quiz Time Allowed: 1 HourKenny CantilaNoch keine Bewertungen
- Two Way SlabDokument17 SeitenTwo Way SlabGetachew MekuriawNoch keine Bewertungen
- Chapter IIIDokument7 SeitenChapter IIIAmirul Zolkhairi100% (1)
- Load DerivationsDokument37 SeitenLoad DerivationsWilbert ReuyanNoch keine Bewertungen
- Clave, Artemio John C./ 1512117 CE513/ Prestresessed Concrete Design Bsce/ 5 Year/ CE52S2/ Assignment No. 2 Engr. Adams Royce A. DionisioDokument3 SeitenClave, Artemio John C./ 1512117 CE513/ Prestresessed Concrete Design Bsce/ 5 Year/ CE52S2/ Assignment No. 2 Engr. Adams Royce A. DionisioDaniel DomingoNoch keine Bewertungen
- Dead Loads: Roof: Unit 3.54 Kpa Roof DeckDokument52 SeitenDead Loads: Roof: Unit 3.54 Kpa Roof DeckJohn Paul Hilary Espejo100% (1)
- Pool AnalysisDokument38 SeitenPool AnalysissubhanNoch keine Bewertungen
- Time PampletDokument2 SeitenTime PampletraveemcaNoch keine Bewertungen
- Superimposed Dead Loads and Live Loads Load MagnitudeDokument8 SeitenSuperimposed Dead Loads and Live Loads Load MagnitudeLouieNoch keine Bewertungen
- Design of Compression Members-3Dokument62 SeitenDesign of Compression Members-3eseem0% (1)
- BeamDokument26 SeitenBeamGertjan DuniceriNoch keine Bewertungen
- Materi Soal Cross Portal BergoyangDokument9 SeitenMateri Soal Cross Portal BergoyangFerri SagalaNoch keine Bewertungen
- Solid GeometryDokument4 SeitenSolid GeometryZairah Ann BorjaNoch keine Bewertungen
- Background of Amburayan Bauang PamplonaDokument2 SeitenBackground of Amburayan Bauang PamplonaZairah Ann Borja100% (1)
- Spherical Trigonometry: Spherical Trigonometry - It Concerns With Important Propositions of Spherical TriangleDokument3 SeitenSpherical Trigonometry: Spherical Trigonometry - It Concerns With Important Propositions of Spherical TriangleZairah Ann BorjaNoch keine Bewertungen
- Tee - Beams: Plain & Reinforced Concrete-1Dokument17 SeitenTee - Beams: Plain & Reinforced Concrete-1Zairah Ann BorjaNoch keine Bewertungen
- Character Development Questions & Free Printable WorksheetsDokument27 SeitenCharacter Development Questions & Free Printable WorksheetsZairah Ann BorjaNoch keine Bewertungen
- Aklan Geohazard AssessmentDokument135 SeitenAklan Geohazard AssessmentZairah Ann Borja100% (1)
- Water Distribution System Challenges and Solutions PDFDokument9 SeitenWater Distribution System Challenges and Solutions PDFZairah Ann BorjaNoch keine Bewertungen
- Replace II, 2nd Game, Midorima Shintarous Extremely Unlucky Day - 2015Dokument30 SeitenReplace II, 2nd Game, Midorima Shintarous Extremely Unlucky Day - 2015Zairah Ann BorjaNoch keine Bewertungen
- 2013 14 Cost Benefit TemplateDokument7 Seiten2013 14 Cost Benefit TemplateZairah Ann BorjaNoch keine Bewertungen
- Iloilo Geohazard ReportDokument150 SeitenIloilo Geohazard ReportZairah Ann Borja0% (1)
- Reinforcement PDFDokument102 SeitenReinforcement PDFZairah Ann BorjaNoch keine Bewertungen
- Group 3 FormworksDokument82 SeitenGroup 3 FormworksZairah Ann BorjaNoch keine Bewertungen
- IC Simple Cost-Benefit AnalysisDokument8 SeitenIC Simple Cost-Benefit AnalysisZairah Ann BorjaNoch keine Bewertungen
- Transport Engineering and Reduction in Crime: The Medellín CaseDokument5 SeitenTransport Engineering and Reduction in Crime: The Medellín CaseZairah Ann BorjaNoch keine Bewertungen
- Group 2 - Quality ControlDokument94 SeitenGroup 2 - Quality ControlZairah Ann Borja100% (1)
- 20 Solved Problems in Soil MechanicsDokument22 Seiten20 Solved Problems in Soil MechanicsZairah Ann Borja89% (9)
- Reinforcement PDFDokument102 SeitenReinforcement PDFZairah Ann BorjaNoch keine Bewertungen
- PM C1001HC Documentation REV2.11Dokument111 SeitenPM C1001HC Documentation REV2.11sashahadNoch keine Bewertungen
- Centroid CNC Alarms Errors MessagesDokument6 SeitenCentroid CNC Alarms Errors MessagesRevolusiSoekarnoNoch keine Bewertungen
- M433a, M436n, M436dn, M436ndaDokument312 SeitenM433a, M436n, M436dn, M436ndaSanjiv Om Sai MartNoch keine Bewertungen
- ServiceNow Knowledge ManagementDokument64 SeitenServiceNow Knowledge ManagementpomanppNoch keine Bewertungen
- 8086 Programming: Compiled By: Chandra Thapa October 23, 2012Dokument76 Seiten8086 Programming: Compiled By: Chandra Thapa October 23, 2012gideontargrave7Noch keine Bewertungen
- 1850 TSS-320 R3-4 DSDokument3 Seiten1850 TSS-320 R3-4 DSbaratepaNoch keine Bewertungen
- Digital Signal Processing-1703074Dokument12 SeitenDigital Signal Processing-1703074Sourabh KapoørNoch keine Bewertungen
- Kasus LegoDokument10 SeitenKasus LegocitraNoch keine Bewertungen
- !!! Aplied Combinatorial MathematicsDokument8 Seiten!!! Aplied Combinatorial MathematicsMaria KanellopoulouNoch keine Bewertungen
- NX Assign Material PropertiesDokument54 SeitenNX Assign Material PropertiesbiondavNoch keine Bewertungen
- TDD SampleDokument10 SeitenTDD Sampleminhaj_kcc100% (1)
- Resumen PythonDokument13 SeitenResumen PythonsanabressanabresNoch keine Bewertungen
- BSC Course ContentsDokument4 SeitenBSC Course ContentsAns MehmoodNoch keine Bewertungen
- Paraskumar Rudani Java Developer Contact: 216-612-4955: Professional SummaryDokument5 SeitenParaskumar Rudani Java Developer Contact: 216-612-4955: Professional SummaryVinod GummulaNoch keine Bewertungen
- ACS800 C (+N697) 5 S S R: Rane Peed TEP EferenceDokument3 SeitenACS800 C (+N697) 5 S S R: Rane Peed TEP EferencephysicudoNoch keine Bewertungen
- Hsslive March 2023 QN FY 430 (Computer Sci.)Dokument12 SeitenHsslive March 2023 QN FY 430 (Computer Sci.)hakkimarmuNoch keine Bewertungen
- Classification of Data Center Operations Technology (OT) Management ToolsDokument16 SeitenClassification of Data Center Operations Technology (OT) Management ToolsAce Glen Garcia100% (1)
- Vertical Horizon Vh2402s2 Swich ManualDokument116 SeitenVertical Horizon Vh2402s2 Swich ManualMiguel Angel RicoNoch keine Bewertungen
- Preview of NeuroShell Trader Multiple Timeframe IndicatorsDokument20 SeitenPreview of NeuroShell Trader Multiple Timeframe IndicatorsFadli's ChannelNoch keine Bewertungen
- CS8451-Design and Analysis of Algorithms PDFDokument18 SeitenCS8451-Design and Analysis of Algorithms PDFkathirpkNoch keine Bewertungen
- Curriculam Vitae Manjunatha Kotagunasi Jigani, Bangalore 562106 Mobile No E-Mail IdDokument3 SeitenCurriculam Vitae Manjunatha Kotagunasi Jigani, Bangalore 562106 Mobile No E-Mail IdManjunath KotagunasiNoch keine Bewertungen
- Database Management System: Dr. Neha Gulati University Business School Panjab UniversityDokument30 SeitenDatabase Management System: Dr. Neha Gulati University Business School Panjab UniversityNavneet Nanda100% (1)
- StampsDokument44 SeitenStampsrizkyNoch keine Bewertungen
- Namespaces in C++Dokument8 SeitenNamespaces in C++H028 Deepshikha Sharma ECENoch keine Bewertungen
- XII Ch12 Linear Programming Remesh HssliveDokument24 SeitenXII Ch12 Linear Programming Remesh HssliveRanit MukherjeeNoch keine Bewertungen
- C Zentrix ManualDokument134 SeitenC Zentrix ManualPramod Pal100% (1)
- Lesson 1 Introduction To CATIA ProgrammingDokument8 SeitenLesson 1 Introduction To CATIA Programmingmilasko86Noch keine Bewertungen
- Module 1Dokument28 SeitenModule 1dr.reshmabanuvvietNoch keine Bewertungen
- Verifire® Tools: Version 8.00 (And Higher) Programming and Test UtilityDokument2 SeitenVerifire® Tools: Version 8.00 (And Higher) Programming and Test UtilityCarlos FreireNoch keine Bewertungen
- FileMaker 101Dokument57 SeitenFileMaker 101Byron Songer0% (1)