Das könnte Ihnen auch gefallen
- Cuaderno de Trabajo - Nivelación Matemática (DUOC UC)Dokument272 SeitenCuaderno de Trabajo - Nivelación Matemática (DUOC UC)Alexander Patricio Escobar Pinto78% (32)
- Simulación de sistemas productivos con ArenaVon EverandSimulación de sistemas productivos con ArenaBewertung: 5 von 5 Sternen5/5 (1)
- AUTOMATIZACIÓN ROBÓTICA INDUSTRIAL - Tarea5.Dokument5 SeitenAUTOMATIZACIÓN ROBÓTICA INDUSTRIAL - Tarea5.Jose BecerraNoch keine Bewertungen
- UF0853 - Explotación de las funcionalidades del sistema microinformáticoVon EverandUF0853 - Explotación de las funcionalidades del sistema microinformáticoNoch keine Bewertungen
- Taller de Tecnologia e Informatica La RoboticaDokument2 SeitenTaller de Tecnologia e Informatica La RoboticaJonatan Castillo100% (2)
- Brazo Robotico. Trabajo FinalDokument13 SeitenBrazo Robotico. Trabajo Finalxiniskbrera100% (1)
- Y1085215B6D74Dokument1 SeiteY1085215B6D74Elvis Suarez100% (2)
- Tema 4.1.1 Aplicacion de Los Datos Estandar en Operaciones de MaquinadoDokument9 SeitenTema 4.1.1 Aplicacion de Los Datos Estandar en Operaciones de MaquinadoJavierNoch keine Bewertungen
- Lab de Arquitectura de Robots - Práctica 2Dokument8 SeitenLab de Arquitectura de Robots - Práctica 2Rey Alex Leal CorreaNoch keine Bewertungen
- Planilla Control Aut Rob Ind Semana 5Dokument5 SeitenPlanilla Control Aut Rob Ind Semana 5Colo Colo AtacamaNoch keine Bewertungen
- Movimiento de Traslación y Rotación Mas EjerciciosDokument4 SeitenMovimiento de Traslación y Rotación Mas Ejerciciosivan1811Noch keine Bewertungen
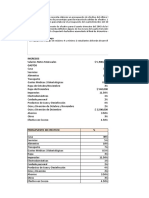
- Presupuesto de EfectivoDokument6 SeitenPresupuesto de EfectivoMarcela PereiraNoch keine Bewertungen
- Introducción a los Algoritmos y las Estructuras de Datos 1: Introducción a los Algoritmos y las Estructuras de Datos, #1Von EverandIntroducción a los Algoritmos y las Estructuras de Datos 1: Introducción a los Algoritmos y las Estructuras de Datos, #1Noch keine Bewertungen
- Proyecto MirosotDokument20 SeitenProyecto MirosotSebastian Miguel Cáceres HuamánNoch keine Bewertungen
- Informe - Robotica.Dokument18 SeitenInforme - Robotica.JhanniferNoch keine Bewertungen
- 1ra Parte ProgramacionDokument6 Seiten1ra Parte ProgramacionSergei UlibarriNoch keine Bewertungen
- Robot Soccer - En.esDokument6 SeitenRobot Soccer - En.esAdrian MedinaNoch keine Bewertungen
- Reporte Simulacion 1Dokument10 SeitenReporte Simulacion 1Fernando Flores cruzNoch keine Bewertungen
- Avance Proyecto Robot TrepadorDokument3 SeitenAvance Proyecto Robot TrepadorPablo TonatoNoch keine Bewertungen
- Diseño, Construccion y Programacion de Un Robot MinisumoDokument9 SeitenDiseño, Construccion y Programacion de Un Robot MinisumoWilliam SolarteNoch keine Bewertungen
- Informe Diseño Proyecto Unidad IIIDokument14 SeitenInforme Diseño Proyecto Unidad IIIPaul JerezNoch keine Bewertungen
- ProyectoDokument16 SeitenProyectoÁngíé LozanoNoch keine Bewertungen
- Practica 1Dokument11 SeitenPractica 1andres_phoenixNoch keine Bewertungen
- Informe Final TFG - Denis MontoyaDokument12 SeitenInforme Final TFG - Denis MontoyaAgung AnomNoch keine Bewertungen
- Reporte de PracticaDokument9 SeitenReporte de PracticaNando “NJX” SNoch keine Bewertungen
- Manufactura Inteligente Utilizando Vision para RobotsDokument6 SeitenManufactura Inteligente Utilizando Vision para RobotsjavierchachacoNoch keine Bewertungen
- Ieee VelocistaDokument6 SeitenIeee VelocistaDiana MahechaNoch keine Bewertungen
- Práctica #3. Control de PosiciónDokument17 SeitenPráctica #3. Control de PosiciónHerrera Lorenzo Joran JavierNoch keine Bewertungen
- Robo ZumoDokument52 SeitenRobo ZumoGilbertoCarrilloNoch keine Bewertungen
- LOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturaDokument5 SeitenLOPEZ AMBROSIO SALOMON ROBOTICA ReporteLecturasalomon ambrosioNoch keine Bewertungen
- Reporte - Robot InsectoDokument4 SeitenReporte - Robot InsectoRangel Gurria Bárbara0% (1)
- Sistemade SoldadoDokument7 SeitenSistemade SoldadoGabriel OrtegaNoch keine Bewertungen
- Reto - Partes de Un RobotDokument10 SeitenReto - Partes de Un RobotAlejo diazNoch keine Bewertungen
- El Robot PUMADokument11 SeitenEl Robot PUMAalbeiromarinsosaNoch keine Bewertungen
- Robot Diferencial Etapa 2Dokument5 SeitenRobot Diferencial Etapa 2Eduardo SolisNoch keine Bewertungen
- Paper Balancin658Dokument12 SeitenPaper Balancin658Henry PilamalaNoch keine Bewertungen
- Etn - 1022 (Mamani Gutierrez, Freddy) - Brazo RoboticoDokument10 SeitenEtn - 1022 (Mamani Gutierrez, Freddy) - Brazo RoboticoFreddyGutierrezNoch keine Bewertungen
- Proyecto Final RoboticaDokument11 SeitenProyecto Final RoboticaOtto RuefliNoch keine Bewertungen
- Elaboracion de Un Robot Bipedo de Caminado DinamicoDokument115 SeitenElaboracion de Un Robot Bipedo de Caminado DinamicoPedro Palencia100% (1)
- Estructura Mecánica de Un RobotDokument13 SeitenEstructura Mecánica de Un RobotKevin MontillaNoch keine Bewertungen
- Diseño y Construcción de Un Móvil Electromecánico Con Las Características Mínismas de Un RobotDokument6 SeitenDiseño y Construcción de Un Móvil Electromecánico Con Las Características Mínismas de Un RobotCristian Cisneros100% (2)
- SustentacionDokument5 SeitenSustentacionJuliana ReyNoch keine Bewertungen
- PROYECTOFINALDokument23 SeitenPROYECTOFINALOptica MecatronicaNoch keine Bewertungen
- Brazo RoboticoDokument8 SeitenBrazo RoboticoAndres CuadradoNoch keine Bewertungen
- Robótica Industrial FinalDokument20 SeitenRobótica Industrial FinalMarvel Antonio Oviedo CasasNoch keine Bewertungen
- Suyay El Robot Universal Programado Con PinguinoDokument6 SeitenSuyay El Robot Universal Programado Con PinguinoMiguel Alberto Dávila SacotoNoch keine Bewertungen
- Cosimir Tutorial en Esp A05v12n1Dokument5 SeitenCosimir Tutorial en Esp A05v12n1inanjaanpaNoch keine Bewertungen
- Trabajo de Robotica para HacerDokument3 SeitenTrabajo de Robotica para HacerNatalia CamposNoch keine Bewertungen
- Analisis SODokument7 SeitenAnalisis SODaniel DíazNoch keine Bewertungen
- La RoboticaDokument7 SeitenLa RoboticaDiego AragonNoch keine Bewertungen
- Diseño y Control Estructural de Unrobot Bipedo EducativoDokument9 SeitenDiseño y Control Estructural de Unrobot Bipedo EducativoDiego Vera DiazNoch keine Bewertungen
- Manual de Usuario para Utilizar El Software RoboanalyzerDokument11 SeitenManual de Usuario para Utilizar El Software Roboanalyzerraziel sanchezNoch keine Bewertungen
- Informe Proyecto Integrador 2020Dokument8 SeitenInforme Proyecto Integrador 2020Diego RoaNoch keine Bewertungen
- PROYECTO MINISUMO - Dzul Gonzalez Marcos AdalbertoDokument15 SeitenPROYECTO MINISUMO - Dzul Gonzalez Marcos AdalbertoDzul González Marcos AdalbertoNoch keine Bewertungen
- Un Sistema OperativoDokument41 SeitenUn Sistema OperativoDavid PeñaNoch keine Bewertungen
- Libro 6 para El DocenteDokument24 SeitenLibro 6 para El DocenteNadia BarbieriNoch keine Bewertungen
- USO DE Sistema Robótico SCORBOT-ER CompletoDokument12 SeitenUSO DE Sistema Robótico SCORBOT-ER CompletoMarcelo ValenciaNoch keine Bewertungen
- Robot Diferencial Etapa 2Dokument4 SeitenRobot Diferencial Etapa 2Eduardo SolisNoch keine Bewertungen
- J Paez Calculo IIIDokument14 SeitenJ Paez Calculo IIILlerson Bustos VegaNoch keine Bewertungen
- Robótica PDFDokument6 SeitenRobótica PDFmariaml15Noch keine Bewertungen
- Tesina ZeusDokument77 SeitenTesina ZeusMichelle ZapataNoch keine Bewertungen
- La Computación en La RobóticaDokument15 SeitenLa Computación en La RobóticaSamuel Gómez0% (1)
- Reporte Robot de Tareas - Final.1Dokument42 SeitenReporte Robot de Tareas - Final.1Angel PardenillaNoch keine Bewertungen
- Arranque A Tension ReducidaDokument8 SeitenArranque A Tension ReducidaFrancisco Daniel Alava PinargoteNoch keine Bewertungen
- Gestion y Competencias Municipales PDFDokument12 SeitenGestion y Competencias Municipales PDFAnonymous OvIxb9iANNoch keine Bewertungen
- Cuarta Entrega Foro Debate SGSSTDokument2 SeitenCuarta Entrega Foro Debate SGSSTstephaniaNoch keine Bewertungen
- Marketing de Afiliados ¿Un Estilo de Vida?: Yair de La Cruz CelisDokument18 SeitenMarketing de Afiliados ¿Un Estilo de Vida?: Yair de La Cruz CelisgeddyNoch keine Bewertungen
- Dell Program PartnerDokument17 SeitenDell Program PartnerramepieNoch keine Bewertungen
- Trabajo Final Fundamentos 2Dokument22 SeitenTrabajo Final Fundamentos 2Jessica BritoNoch keine Bewertungen
- Diarios de Sesiones de La Cámara de Diputados - Sesión 27.a Extraordinaria en Martes 27 de Noviembre de 1956Dokument140 SeitenDiarios de Sesiones de La Cámara de Diputados - Sesión 27.a Extraordinaria en Martes 27 de Noviembre de 1956Xavier MontesNoch keine Bewertungen
- Calderón VGPA Zaquinaula BWA SDDokument86 SeitenCalderón VGPA Zaquinaula BWA SDPaula Andrea Vargas MarinNoch keine Bewertungen
- Avances en La Producción y Aplicación de Aceros Bifásicos PDFDokument9 SeitenAvances en La Producción y Aplicación de Aceros Bifásicos PDFJorge MadiasNoch keine Bewertungen
- Trabajo en Sistema Driwual SRT .SheylaDokument2 SeitenTrabajo en Sistema Driwual SRT .SheylaJhon SonNoch keine Bewertungen
- Especificación Técnica Garra Del OsoDokument15 SeitenEspecificación Técnica Garra Del OsoNicole RodriguezNoch keine Bewertungen
- Actividad 7Dokument5 SeitenActividad 7Monica Katerine GARCIA CASTILLONoch keine Bewertungen
- Proceso Contravencional y Coactivo FCMDokument14 SeitenProceso Contravencional y Coactivo FCMANGELA MORANoch keine Bewertungen
- Informatica 2Dokument7 SeitenInformatica 2AngelNoch keine Bewertungen
- GTE - INS - 002-I Nstructivo Generación y Transmisión Fondos - V1 PDFDokument34 SeitenGTE - INS - 002-I Nstructivo Generación y Transmisión Fondos - V1 PDFJohn VargasNoch keine Bewertungen
- MEP Presentacion IdentidadCorporativaDokument23 SeitenMEP Presentacion IdentidadCorporativaKevin Llanos MondragónNoch keine Bewertungen
- BioMason - El Ladrillo Biológicamente CultivadoDokument2 SeitenBioMason - El Ladrillo Biológicamente CultivadogabrielNoch keine Bewertungen
- Teoria de ControlDokument1 SeiteTeoria de Controljohn valecillosNoch keine Bewertungen
- Investigacion Inter 2Dokument5 SeitenInvestigacion Inter 2Daniela TorosNoch keine Bewertungen
- 2-Analisis de Muda y Balance de CargasDokument34 Seiten2-Analisis de Muda y Balance de CargasElba Margarita Cruz RiosNoch keine Bewertungen
- El Bicentenario-01 1810-1829Dokument81 SeitenEl Bicentenario-01 1810-1829Milton LukianovNoch keine Bewertungen
- Catálogo-Subasta Vehículos PDFDokument4 SeitenCatálogo-Subasta Vehículos PDFArnold GutiNoch keine Bewertungen
- IRENA REmap Republica Dominicana 2016Dokument124 SeitenIRENA REmap Republica Dominicana 2016Daniel E. De La RosaNoch keine Bewertungen
- Laboratorio No. 3 de Matematica Financiera IDokument1 SeiteLaboratorio No. 3 de Matematica Financiera IANGELA MARIA MAGDALENA HERNANDEZ GARCIANoch keine Bewertungen
- Art. 128 Del Decreto Supremo 3434Dokument1 SeiteArt. 128 Del Decreto Supremo 3434Sergio Enrique Espinoza RojasNoch keine Bewertungen