Das könnte Ihnen auch gefallen
- Implementing a waveform recovery algorithm on FPGAs using a zonal method (HudginDokument10 SeitenImplementing a waveform recovery algorithm on FPGAs using a zonal method (Hudginmanuales1000Noch keine Bewertungen
- RCS VnaDokument12 SeitenRCS VnaMarius CheroiuNoch keine Bewertungen
- Computer Processing of Remotely-Sensed Images: An IntroductionVon EverandComputer Processing of Remotely-Sensed Images: An IntroductionNoch keine Bewertungen
- High Resolution Radar Cross Section Imaging Based On Complex Target Backscattering SimulationDokument4 SeitenHigh Resolution Radar Cross Section Imaging Based On Complex Target Backscattering SimulationYuri BobkovNoch keine Bewertungen
- Standard and Super-Resolution Bioimaging Data Analysis: A PrimerVon EverandStandard and Super-Resolution Bioimaging Data Analysis: A PrimerNoch keine Bewertungen
- IWEX: Direct Ultrasonic Imaging of Subsurface DefectsDokument5 SeitenIWEX: Direct Ultrasonic Imaging of Subsurface DefectsIndigo WaveNoch keine Bewertungen
- Electron MicroscopeDokument8 SeitenElectron MicroscopeestherNoch keine Bewertungen
- Remote Sensing: Figures of Merit For Indirect Time-of-Flight 3D Cameras: Definition and Experimental EvaluationDokument12 SeitenRemote Sensing: Figures of Merit For Indirect Time-of-Flight 3D Cameras: Definition and Experimental EvaluationVinod K JacobNoch keine Bewertungen
- TOF Camera WhitePaperDokument10 SeitenTOF Camera WhitePaperaaaNoch keine Bewertungen
- Calculation of Coherent Radiation From Ultra-Short Electron Beams Using A Liénard-Wiechert Based Simulation CodeDokument7 SeitenCalculation of Coherent Radiation From Ultra-Short Electron Beams Using A Liénard-Wiechert Based Simulation CodeMichael Fairchild100% (2)
- Adaptive Mixed Norm Optical Flow Estimation Vcip 2005Dokument8 SeitenAdaptive Mixed Norm Optical Flow Estimation Vcip 2005ShadowNoch keine Bewertungen
- Models - Roptics.czerny Turner MonochromatorDokument18 SeitenModels - Roptics.czerny Turner MonochromatorHIPOLITO ARTURO RIVEROS GUEVARANoch keine Bewertungen
- Optics and Lasers in Engineering: Zhongjie Ren, Jianxin Li, Rihong Zhu, Ke Cui, Qing He, Hailin WangDokument6 SeitenOptics and Lasers in Engineering: Zhongjie Ren, Jianxin Li, Rihong Zhu, Ke Cui, Qing He, Hailin WangayuNoch keine Bewertungen
- Block-Matching Sub-Pixel Motion Estimation From Noisy, Under-Sampled Frames - An Empirical Performance EvaluationDokument10 SeitenBlock-Matching Sub-Pixel Motion Estimation From Noisy, Under-Sampled Frames - An Empirical Performance Evaluationjuan.vesaNoch keine Bewertungen
- SAR Image Formation Toolbox For MATLABDokument13 SeitenSAR Image Formation Toolbox For MATLABLissete VergaraNoch keine Bewertungen
- Measuring Speed of Light ExperimentallyDokument2 SeitenMeasuring Speed of Light ExperimentallybrettNoch keine Bewertungen
- Design of Linear Array Transducer Using Ultrasound Simulation Program Field-IIDokument7 SeitenDesign of Linear Array Transducer Using Ultrasound Simulation Program Field-IIinventyNoch keine Bewertungen
- Quantum Theory of Optical Temporal Phase and Instantaneous FrequencyDokument16 SeitenQuantum Theory of Optical Temporal Phase and Instantaneous FrequencyNiranjan SridharNoch keine Bewertungen
- Zhao 2009Dokument6 SeitenZhao 20092020.satyam.dubeyNoch keine Bewertungen
- Moving Target Range Detection Algorithm For FMCW Radar: Eugin Hyun, Jonghun LeeDokument4 SeitenMoving Target Range Detection Algorithm For FMCW Radar: Eugin Hyun, Jonghun LeeDivine Grace BurmalNoch keine Bewertungen
- Manuscript v2 ShuaishuaiDokument9 SeitenManuscript v2 ShuaishuaiFarazNoch keine Bewertungen
- Wavelet Based Compressive Sensing Techniques For Image CompressionDokument6 SeitenWavelet Based Compressive Sensing Techniques For Image CompressiondwipradNoch keine Bewertungen
- Generating Arbitrary Laser Beam Shapes Through Phase-Mapped Designed Beam SplittingDokument12 SeitenGenerating Arbitrary Laser Beam Shapes Through Phase-Mapped Designed Beam SplittingTristan Valenzuela SalazarNoch keine Bewertungen
- A Distributed Linear Least Squares Method For Precise Localization With Low Complexity in Wireless Sensor NetworksDokument16 SeitenA Distributed Linear Least Squares Method For Precise Localization With Low Complexity in Wireless Sensor NetworksMakhsyar Souvilly DinniNoch keine Bewertungen
- Study On Multi Scattering Point Modeling For Target in Fuze RF Simulation and Its ApplicationDokument4 SeitenStudy On Multi Scattering Point Modeling For Target in Fuze RF Simulation and Its ApplicationAlex YangNoch keine Bewertungen
- Sub-Pixel Image Registration Techniques For High Precision Micro Motor Runout MeasurementDokument3 SeitenSub-Pixel Image Registration Techniques For High Precision Micro Motor Runout MeasurementPramod ANoch keine Bewertungen
- Michelson InterferometerDokument5 SeitenMichelson InterferometerJiya KhanNoch keine Bewertungen
- EI 2018 Art00003 Kohei-YamadaDokument4 SeitenEI 2018 Art00003 Kohei-YamadalimanNoch keine Bewertungen
- Smart CCD Image Sensors For Optical Metrology and Machine Vision PDFDokument4 SeitenSmart CCD Image Sensors For Optical Metrology and Machine Vision PDFMarco TorresNoch keine Bewertungen
- EuMW Serhir TimeDomaineDokument4 SeitenEuMW Serhir TimeDomaineNageswara Rao ChallaNoch keine Bewertungen
- Imaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueDokument7 SeitenImaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueAsd DsaNoch keine Bewertungen
- PhysRevLett 131 053803Dokument6 SeitenPhysRevLett 131 053803Marco SIMONENoch keine Bewertungen
- CARATTERIZZAZIONE Nphoton.2015.279Dokument4 SeitenCARATTERIZZAZIONE Nphoton.2015.279Claudio BiaginiNoch keine Bewertungen
- Research Article: CLEAN Technique To Classify and Detect Objects in Subsurface ImagingDokument7 SeitenResearch Article: CLEAN Technique To Classify and Detect Objects in Subsurface ImagingBilge MiniskerNoch keine Bewertungen
- One-Antenna Radiation Pattern Measurement of On-Wafer Antennas in Probe Station EnvironmentDokument9 SeitenOne-Antenna Radiation Pattern Measurement of On-Wafer Antennas in Probe Station EnvironmentPMMNoch keine Bewertungen
- TOF-Basics - Understanding the fundamentals of time-of-flight range imagingDokument14 SeitenTOF-Basics - Understanding the fundamentals of time-of-flight range imagingPhạm GiangNoch keine Bewertungen
- 381 Nature Article Daniel Rennie (Fourier Optics) PDFDokument3 Seiten381 Nature Article Daniel Rennie (Fourier Optics) PDFdragontrainNoch keine Bewertungen
- Multispectral Image Capturing System Based On A Micro Mirror Device With A Diffraction GratingDokument5 SeitenMultispectral Image Capturing System Based On A Micro Mirror Device With A Diffraction Grating741852963aaaNoch keine Bewertungen
- Michelson InterferometerDokument5 SeitenMichelson InterferometerSajadSidiqNoch keine Bewertungen
- Fardapaper Geolocation Using TDOA and FDOA MeasurementsDokument8 SeitenFardapaper Geolocation Using TDOA and FDOA MeasurementsOr ZamirNoch keine Bewertungen
- TOF-40: Time-of-Flight Basics ExplainedDokument15 SeitenTOF-40: Time-of-Flight Basics ExplainedZhicheng1 YANGNoch keine Bewertungen
- Basics of Spectral Measurement: Issued By: Jeti Technische Instrumente GMBH Jena, May 2005Dokument53 SeitenBasics of Spectral Measurement: Issued By: Jeti Technische Instrumente GMBH Jena, May 2005Bilal MaqsoodNoch keine Bewertungen
- A Multi-Feature Visibility Processing Algorithm For Radio Interferometric Imaging On Next-Generation TelescopesDokument14 SeitenA Multi-Feature Visibility Processing Algorithm For Radio Interferometric Imaging On Next-Generation TelescopesAnonymous FGY7goNoch keine Bewertungen
- Spherical Wave Near-Field Imaging and Radar Cross-Section MeasurementDokument6 SeitenSpherical Wave Near-Field Imaging and Radar Cross-Section Measurementoyavuz38Noch keine Bewertungen
- Unit 6: Electronic Distance Measurement (EDM)Dokument29 SeitenUnit 6: Electronic Distance Measurement (EDM)farie ahmadNoch keine Bewertungen
- Cs ImagingDokument13 SeitenCs ImagingRoronoaNoch keine Bewertungen
- Radargrammetry and Sar InterferommetryDokument6 SeitenRadargrammetry and Sar InterferommetryvrixscribdNoch keine Bewertungen
- Wemmu 001Dokument4 SeitenWemmu 001shastryNoch keine Bewertungen
- High Accuracy Wave Filed Reconstruction Decoupled Inverse Imaging With Sparse Modelig of Phase and AmplitudeDokument11 SeitenHigh Accuracy Wave Filed Reconstruction Decoupled Inverse Imaging With Sparse Modelig of Phase and AmplitudeAsim AsrarNoch keine Bewertungen
- POD Analysis of Flame Dynamics From Optical Imaging of An IC EngineDokument4 SeitenPOD Analysis of Flame Dynamics From Optical Imaging of An IC EngineAristide BasurtoNoch keine Bewertungen
- SAR Image Change Detection Using ADWT and MFO AlgorithmDokument7 SeitenSAR Image Change Detection Using ADWT and MFO AlgorithmDOKKU LAKSHMI PAVANINoch keine Bewertungen
- Visually Improved Understanding of Three-Dimensionally Propagating Electromagnetic Fields in Wireless NetworksDokument8 SeitenVisually Improved Understanding of Three-Dimensionally Propagating Electromagnetic Fields in Wireless NetworkstahaunswNoch keine Bewertungen
- Hologram Matrix and Its Application to a Novel RadarDokument2 SeitenHologram Matrix and Its Application to a Novel RadarRitesh SinghNoch keine Bewertungen
- Beamforming Narrowband and Broadband Signals: John E. PiperDokument15 SeitenBeamforming Narrowband and Broadband Signals: John E. PiperSohail SardarNoch keine Bewertungen
- P Caip 95Dokument10 SeitenP Caip 95jaindipak21Noch keine Bewertungen
- Scene Generation for Tracking Small Targets Against Cloud BackgroundsDokument8 SeitenScene Generation for Tracking Small Targets Against Cloud Backgroundsnpadma_6Noch keine Bewertungen
- Aj 036285288Dokument4 SeitenAj 036285288AJER JOURNALNoch keine Bewertungen
- Limit GaugesDokument29 SeitenLimit GaugesMANOJ M83% (6)
- Glukhov 2018 J. Phys.: Conf. Ser. 998 012012Dokument9 SeitenGlukhov 2018 J. Phys.: Conf. Ser. 998 012012Egemet SatisNoch keine Bewertungen
- Limit GaugesDokument29 SeitenLimit GaugesMANOJ M83% (6)
- Ezm 4430Dokument48 SeitenEzm 4430Egemet SatisNoch keine Bewertungen
- 3642 01Dokument4 Seiten3642 01Egemet SatisNoch keine Bewertungen
- Astm D6926 PDFDokument6 SeitenAstm D6926 PDFEgemet SatisNoch keine Bewertungen
- Uncertainty Analysis ofDokument10 SeitenUncertainty Analysis ofEgemet SatisNoch keine Bewertungen
- Astm E448 82 R02 E02 PDFDokument40 SeitenAstm E448 82 R02 E02 PDFPacifier NothingfaceNoch keine Bewertungen
- Uncertainty Analysis ofDokument10 SeitenUncertainty Analysis ofEgemet SatisNoch keine Bewertungen
- 05 Concretes p73 112Dokument40 Seiten05 Concretes p73 112Egemet SatisNoch keine Bewertungen
- Surface Texture Metrology Services Available PDFDokument2 SeitenSurface Texture Metrology Services Available PDFEgemet SatisNoch keine Bewertungen
- Calibration of Digital Level PDFDokument10 SeitenCalibration of Digital Level PDFEgemet SatisNoch keine Bewertungen
- Uncertainty Analysis ofDokument10 SeitenUncertainty Analysis ofEgemet SatisNoch keine Bewertungen
- Segmentasyon PDFDokument1 SeiteSegmentasyon PDFEgemet SatisNoch keine Bewertungen
- Aggregates CatalogueDokument10 SeitenAggregates CatalogueEgemet SatisNoch keine Bewertungen
- Matest Catalogue 6 Cement MortarDokument49 SeitenMatest Catalogue 6 Cement MortarEgemet SatisNoch keine Bewertungen
- High Accuracy Short Range Laser Meter For System Calibration and InstallationDokument8 SeitenHigh Accuracy Short Range Laser Meter For System Calibration and InstallationEgemet SatisNoch keine Bewertungen
- 05 Concretes p73 112Dokument40 Seiten05 Concretes p73 112Egemet SatisNoch keine Bewertungen
- Analysis of Errors of The Testing Equipment For PDFDokument5 SeitenAnalysis of Errors of The Testing Equipment For PDFEgemet SatisNoch keine Bewertungen
- 3835-Article Text PDF-7593-1-10-20130718Dokument14 Seiten3835-Article Text PDF-7593-1-10-20130718Egemet SatisNoch keine Bewertungen
- Bachelor Project 2010: Comparison of Short Range and Long Range Laser Scanner's Accuracy DifferencesDokument27 SeitenBachelor Project 2010: Comparison of Short Range and Long Range Laser Scanner's Accuracy DifferencesEgemet SatisNoch keine Bewertungen
- Analysis of Errors of The Testing Equipment For PDFDokument5 SeitenAnalysis of Errors of The Testing Equipment For PDFEgemet SatisNoch keine Bewertungen
- Iso 11254-1 - 2000 PD Sudan 42 PDFDokument30 SeitenIso 11254-1 - 2000 PD Sudan 42 PDFEgemet SatisNoch keine Bewertungen
- Arazi Ölçüm Cihazları Ve Standartları PDFDokument9 SeitenArazi Ölçüm Cihazları Ve Standartları PDFEgemet SatisNoch keine Bewertungen
- Jpconf5 13 092Dokument5 SeitenJpconf5 13 092Egemet SatisNoch keine Bewertungen
- LVDT Calibration ProcedureDokument3 SeitenLVDT Calibration ProcedureEgemet Satis100% (1)
- FittingData PDFDokument10 SeitenFittingData PDFRajeeb KunwarNoch keine Bewertungen
- ASME B1.3-2007 ¿É ÓÊÜ SS Ç ÄÂÝÎÆ âÁ¿Ï Í .Ó ÖƺÍÃ×ÖÆÂÝÎÆ (UN¡ UNR¡ UNJ¡ MºÍMJ)Dokument22 SeitenASME B1.3-2007 ¿É ÓÊÜ SS Ç ÄÂÝÎÆ âÁ¿Ï Í .Ó ÖƺÍÃ×ÖÆÂÝÎÆ (UN¡ UNR¡ UNJ¡ MºÍMJ)vivek_swati100% (2)
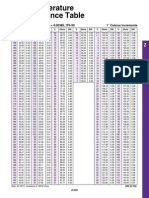
- For European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsDokument3 SeitenFor European Curve, Alpha 0.00385, ITS-90 1° Celsius IncrementsMary HarrisonNoch keine Bewertungen
- Ansi B 7 1 2000 PDFDokument155 SeitenAnsi B 7 1 2000 PDFEgemet SatisNoch keine Bewertungen
- NeurophysiologyDokument364 SeitenNeurophysiologyTaimoor Ul HassanNoch keine Bewertungen
- 1956 - Colinese - Boiler Efficiencies in SugarDokument7 Seiten1956 - Colinese - Boiler Efficiencies in SugarPaul DurkinNoch keine Bewertungen
- Roll Handling Data Form: Company DetailsDokument1 SeiteRoll Handling Data Form: Company DetailsAlfredo MinchezNoch keine Bewertungen
- CO2 Dosing and Generation SystemDokument344 SeitenCO2 Dosing and Generation SystemABAID ULLAHNoch keine Bewertungen
- Effect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteDokument26 SeitenEffect of Restraint, Volume Change, and Reinforcement On Cracking of Mass ConcreteDIDIER ANGEL LOPEZ RINCONNoch keine Bewertungen
- The Relative Pricing of High-Yield Debt: The Case of RJR Nabisco Holdings Capital CorporationDokument24 SeitenThe Relative Pricing of High-Yield Debt: The Case of RJR Nabisco Holdings Capital CorporationAhsen Ali Siddiqui100% (1)
- IT407 Knowledge EngineeringDokument2 SeitenIT407 Knowledge EngineeringVidya ANoch keine Bewertungen
- Generator Protection Application GuideDokument106 SeitenGenerator Protection Application GuideJorge Alberto Chavarría Sacasa100% (1)
- RPGS Complete Lecture Note1 Inpdf Compressed1Dokument203 SeitenRPGS Complete Lecture Note1 Inpdf Compressed1Purusottam PandeyNoch keine Bewertungen
- Control Yokogawa PDFDokument59 SeitenControl Yokogawa PDFmiraNoch keine Bewertungen
- Astm D2899Dokument6 SeitenAstm D2899btwilliNoch keine Bewertungen
- Lecture 5 (River As A Geological Agent)Dokument20 SeitenLecture 5 (River As A Geological Agent)Boos yousufNoch keine Bewertungen
- Measuring AssignmentDokument3 SeitenMeasuring AssignmentArnab BhattacharyaNoch keine Bewertungen
- Nptel: System Analysis and Design - Video CourseDokument2 SeitenNptel: System Analysis and Design - Video CourseAnu PriyaNoch keine Bewertungen
- Area Under The CurveDokument3 SeitenArea Under The CurveReyland DumlaoNoch keine Bewertungen
- Operating Instruction Precision Balance: Kern EwDokument15 SeitenOperating Instruction Precision Balance: Kern EwjohnNoch keine Bewertungen
- Rex - O. Ed. Wagner - W-Waves - BiocommDokument13 SeitenRex - O. Ed. Wagner - W-Waves - BiocommLeon BlažinovićNoch keine Bewertungen
- Technology: ControlsDokument32 SeitenTechnology: ControlsAli Hossain AdnanNoch keine Bewertungen
- Model For Calculating The Refractive Index of DiffDokument5 SeitenModel For Calculating The Refractive Index of DiffNANNoch keine Bewertungen
- Na2xckbr2y Rev 08Dokument1 SeiteNa2xckbr2y Rev 08dardakNoch keine Bewertungen
- Catalogue Inverseurs OTMDokument104 SeitenCatalogue Inverseurs OTMchahbounnabil100% (1)
- CE-2101 Fluid Mechanics: Energy Consideration in Steady FlowDokument53 SeitenCE-2101 Fluid Mechanics: Energy Consideration in Steady FlowShaheer RizwanNoch keine Bewertungen
- Tensile FinalDokument43 SeitenTensile Finalnamrataavyas75% (4)
- Welding robot aviation plug terminal definitionDokument4 SeitenWelding robot aviation plug terminal definitionPhươngNguyễnNoch keine Bewertungen
- Dcee 27a Lect 1Dokument39 SeitenDcee 27a Lect 1Geraldine TimpocNoch keine Bewertungen
- Recurrent Neural Network-Based Robust NonsingularDokument13 SeitenRecurrent Neural Network-Based Robust NonsingularDong HoangNoch keine Bewertungen
- Women Security Assistance System With GPS Tracking and Messaging SystemDokument4 SeitenWomen Security Assistance System With GPS Tracking and Messaging Systemhamed razaNoch keine Bewertungen
- Product Manual For Resilient Seated Cast Iron Air Relief Valves For Water Works Purposes ACCORDING TO IS 14845: 2000Dokument5 SeitenProduct Manual For Resilient Seated Cast Iron Air Relief Valves For Water Works Purposes ACCORDING TO IS 14845: 2000Tanmoy DuttaNoch keine Bewertungen
- DocDokument6 SeitenDocapi-287506055Noch keine Bewertungen
- CarbonatiteDokument9 SeitenCarbonatiteWWW.1580.L0GN.CFNoch keine Bewertungen
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityVon EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityBewertung: 4.5 von 5 Sternen4.5/5 (13)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationVon EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNoch keine Bewertungen
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Von EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Bewertung: 4 von 5 Sternen4/5 (4)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamVon EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNoch keine Bewertungen
- CEH Certified Ethical Hacker Practice Exams, Third EditionVon EverandCEH Certified Ethical Hacker Practice Exams, Third EditionNoch keine Bewertungen
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamVon EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamBewertung: 5 von 5 Sternen5/5 (1)
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxVon EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxBewertung: 4.5 von 5 Sternen4.5/5 (67)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionVon EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionBewertung: 5 von 5 Sternen5/5 (4)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireVon EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNoch keine Bewertungen
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsVon EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsNoch keine Bewertungen
- Amazon Web Services (AWS) Interview Questions and AnswersVon EverandAmazon Web Services (AWS) Interview Questions and AnswersBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Networking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Von EverandNetworking Fundamentals: Develop the networking skills required to pass the Microsoft MTA Networking Fundamentals Exam 98-366Noch keine Bewertungen
- CCST Cisco Certified Support Technician Study Guide: Networking ExamVon EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamNoch keine Bewertungen
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Von EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Noch keine Bewertungen
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeVon EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeBewertung: 5 von 5 Sternen5/5 (1)
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationVon EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationNoch keine Bewertungen
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachVon EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachBewertung: 4.5 von 5 Sternen4.5/5 (3)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsVon EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNoch keine Bewertungen
- IP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsVon EverandIP Routing Protocols All-in-one: OSPF EIGRP IS-IS BGP Hands-on LabsNoch keine Bewertungen
- FTTx Networks: Technology Implementation and OperationVon EverandFTTx Networks: Technology Implementation and OperationBewertung: 5 von 5 Sternen5/5 (1)