Das könnte Ihnen auch gefallen
- Computer Processing of Remotely-Sensed Images: An IntroductionVon EverandComputer Processing of Remotely-Sensed Images: An IntroductionNoch keine Bewertungen
- A Computer Program For Interplanetary Gravity-Assist Trajectory Design and Optimization (Fortran)Dokument20 SeitenA Computer Program For Interplanetary Gravity-Assist Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- Lunar Mission AnalysisDokument270 SeitenLunar Mission AnalysisAnonymous REw1YIq4q7Noch keine Bewertungen
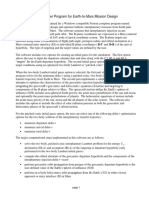
- Earth-to-Mars Mission Design (Fortran)Dokument50 SeitenEarth-to-Mars Mission Design (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- A MATLAB Script For Optimal Single Impulse De-Orbit From Earth OrbitsDokument20 SeitenA MATLAB Script For Optimal Single Impulse De-Orbit From Earth OrbitsAnonymous REw1YIq4q7Noch keine Bewertungen
- A Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Dokument32 SeitenA Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- A MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesDokument15 SeitenA MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesAnonymous REw1YIq4q7Noch keine Bewertungen
- The Gravity Perturbed Hohmann TransferDokument27 SeitenThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7Noch keine Bewertungen
- Optimal Finite-Burn Interplanetary Injection From Earth Orbit (Fortran)Dokument20 SeitenOptimal Finite-Burn Interplanetary Injection From Earth Orbit (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- The Gravity Perturbed Hohmann TransferDokument24 SeitenThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7Noch keine Bewertungen
- Gravity-Assist Trajectory Analysis (MATLAB)Dokument27 SeitenGravity-Assist Trajectory Analysis (MATLAB)Anonymous REw1YIq4q7Noch keine Bewertungen
- Computer Methods For Lunar Mission AnalysisDokument422 SeitenComputer Methods For Lunar Mission AnalysisAnonymous REw1YIq4q7Noch keine Bewertungen
- Cowell's Method: Cowell1.m - Perturbed Orbital Motion of Earth SatellitesDokument25 SeitenCowell's Method: Cowell1.m - Perturbed Orbital Motion of Earth Satellitesbaixiu0813Noch keine Bewertungen
- Impulsive Hyperbolic Injection From A Circular Earth Park Orbit (MATLAB)Dokument9 SeitenImpulsive Hyperbolic Injection From A Circular Earth Park Orbit (MATLAB)Anonymous REw1YIq4q7Noch keine Bewertungen
- Orbital Mechanics MATLAB FunctionsDokument82 SeitenOrbital Mechanics MATLAB FunctionsSnehalagoo LagooNoch keine Bewertungen
- A Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Dokument22 SeitenA Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- G3LUH - PLAN-13 Satellite Position CalculationDokument11 SeitenG3LUH - PLAN-13 Satellite Position CalculationScott HatherNoch keine Bewertungen
- IBM Apollo Saturn Press InformationDokument31 SeitenIBM Apollo Saturn Press InformationBob Andrepont100% (2)
- Estimating The GNSS Broadcast Ephemeris Error - PaperDokument4 SeitenEstimating The GNSS Broadcast Ephemeris Error - PaperSebastian CiubanNoch keine Bewertungen
- Computer Methods For Orbit TransferDokument344 SeitenComputer Methods For Orbit TransferAnonymous REw1YIq4q7Noch keine Bewertungen
- Distance Calculation Between 2 Points On EarthDokument3 SeitenDistance Calculation Between 2 Points On EarthGirish Madhavan Nambiar100% (2)
- A MATLAB Script For Propagating Trajectories From The Earth To The MoonDokument33 SeitenA MATLAB Script For Propagating Trajectories From The Earth To The MoonAnonymous REw1YIq4q7Noch keine Bewertungen
- Runge-Kutta Method: Consider First Single First-Order Equation: Classic High-Order Scheme Error (4th Order)Dokument17 SeitenRunge-Kutta Method: Consider First Single First-Order Equation: Classic High-Order Scheme Error (4th Order)rdehghan66Noch keine Bewertungen
- A Vision-Based Algorithm For Landing Unmanned Aerial VehiclesDokument4 SeitenA Vision-Based Algorithm For Landing Unmanned Aerial VehiclesSalman Ahmed KhanNoch keine Bewertungen
- Interplanetary Gravity-Assist Trajectory OptimizationDokument39 SeitenInterplanetary Gravity-Assist Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Cs 3422872295Dokument9 SeitenCs 3422872295IJMERNoch keine Bewertungen
- Tnote 2Dokument3 SeitenTnote 2trinhthanglongNoch keine Bewertungen
- Precise SV VelocitiesDokument10 SeitenPrecise SV Velocitiesnmf77Noch keine Bewertungen
- Implementation and Statistical Analysis of A Differential GPS SystemDokument61 SeitenImplementation and Statistical Analysis of A Differential GPS SystemRajesh KarriNoch keine Bewertungen
- Cook Jbjssim PresentationDokument23 SeitenCook Jbjssim Presentationapi-223113705Noch keine Bewertungen
- Space Trek SGP4Dokument91 SeitenSpace Trek SGP4Hani MeshȜalNoch keine Bewertungen
- Finite-Burn Trans-Lunar Trajectory OptimizationDokument53 SeitenFinite-Burn Trans-Lunar Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Assignment 1Dokument12 SeitenAssignment 1Germán Gallardo DuránNoch keine Bewertungen
- Inverted Pendulum Design With Hardware Fuzzy Logic ControllerDokument6 SeitenInverted Pendulum Design With Hardware Fuzzy Logic ControlleranonymousxxNoch keine Bewertungen
- Continuous Low-Thrust LEO-to-GEO Trajectory OptimizationDokument27 SeitenContinuous Low-Thrust LEO-to-GEO Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Position Estimation For A Mobile Robot Using Data FusionDokument6 SeitenPosition Estimation For A Mobile Robot Using Data FusionЋирка ФејзбуџаркаNoch keine Bewertungen
- Plotting On Google Static Maps in R: Markus Loecher Sense Networks December 13, 2010Dokument7 SeitenPlotting On Google Static Maps in R: Markus Loecher Sense Networks December 13, 2010Phellipe CruzNoch keine Bewertungen
- Individual ReportDokument5 SeitenIndividual ReportfynnstarkieNoch keine Bewertungen
- Appendix A Coordinate TransformationDokument21 SeitenAppendix A Coordinate TransformationWahyu Teo ParmadiNoch keine Bewertungen
- AERO21111_GMAT Coursework 2023_24 (Blank)(1)Dokument7 SeitenAERO21111_GMAT Coursework 2023_24 (Blank)(1)Aryan PandeyNoch keine Bewertungen
- Algorithms For The Computation of The Sun Position From 2010 To 2110Dokument6 SeitenAlgorithms For The Computation of The Sun Position From 2010 To 2110Mauricio Parada ZuñigaNoch keine Bewertungen
- SpecialsDokument14 SeitenSpecialsshashi891965Noch keine Bewertungen
- Simulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathDokument6 SeitenSimulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathIon TomitaNoch keine Bewertungen
- Roll Pitch Drift CompensationDokument2 SeitenRoll Pitch Drift Compensation何志坚Noch keine Bewertungen
- Ekf 3stateDokument18 SeitenEkf 3stateAlp GürkaynakNoch keine Bewertungen
- Total Station Surveying: May 2011 CE 271Dokument16 SeitenTotal Station Surveying: May 2011 CE 271masterat0rNoch keine Bewertungen
- P4 Rwhite Paper V2Dokument20 SeitenP4 Rwhite Paper V2Andrei SavinNoch keine Bewertungen
- Ray Trace Notes Explained with Atmospheric Refraction ExamplesDokument7 SeitenRay Trace Notes Explained with Atmospheric Refraction Examplesiresa_nuratNoch keine Bewertungen
- Projectile Motion With Air ResistanceDokument5 SeitenProjectile Motion With Air ResistanceGra Vity100% (1)
- Homework # 3Dokument2 SeitenHomework # 3eniNoch keine Bewertungen
- As A Partial Requirement For The Course: Applied Numerical Methods in EngineeringDokument8 SeitenAs A Partial Requirement For The Course: Applied Numerical Methods in EngineeringAshley HansonNoch keine Bewertungen
- EPC - Matlab Software To Estimate Euler Pole ParametersDokument10 SeitenEPC - Matlab Software To Estimate Euler Pole Parametersjuan luisNoch keine Bewertungen
- Sheet 2: Topic: Motion Models and Robot OdometryDokument6 SeitenSheet 2: Topic: Motion Models and Robot OdometryAmit ShuklaNoch keine Bewertungen
- Idra User ManualDokument48 SeitenIdra User Manualmanushanker20Noch keine Bewertungen
- Calculating Vegetation Indices from Landsat DataDokument18 SeitenCalculating Vegetation Indices from Landsat DataMolly ChaseNoch keine Bewertungen
- Users Manual For tomoDD11 Double-Difference TomogDokument8 SeitenUsers Manual For tomoDD11 Double-Difference TomogJosé Luis SánchezNoch keine Bewertungen
- 3D Model Control ExcavatorDokument7 Seiten3D Model Control Excavatorminaya2008Noch keine Bewertungen
- RoboticsDokument9 SeitenRoboticsKrishna Prakash NanduriNoch keine Bewertungen
- Self-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverDokument5 SeitenSelf-Tuning Controller For Servo Motor With An Adaptive Disturbance ObserverrezadigitNoch keine Bewertungen
- Computer Methods For Lunar Mission AnalysisDokument422 SeitenComputer Methods For Lunar Mission AnalysisAnonymous REw1YIq4q7Noch keine Bewertungen
- Low-Thrust Interplanetary Trajectory OptimizationDokument52 SeitenLow-Thrust Interplanetary Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Computer Methods For Aerospace Trajectory OptimizationDokument468 SeitenComputer Methods For Aerospace Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Computer Methods For Orbit TransferDokument344 SeitenComputer Methods For Orbit TransferAnonymous REw1YIq4q7Noch keine Bewertungen
- Creating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Dokument23 SeitenCreating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- Finite-Burn, Earth Orbit Rendezvous Trajectory OptimizationDokument30 SeitenFinite-Burn, Earth Orbit Rendezvous Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Computer Methods For TransEarth TCM Delta-V Design and OptimizationDokument12 SeitenComputer Methods For TransEarth TCM Delta-V Design and OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Orbit Theory and ApplicationDokument246 SeitenOrbit Theory and ApplicationPeacefulLionNoch keine Bewertungen
- Two Maneuver, Finite-Burn Trajectory OptimizationDokument35 SeitenTwo Maneuver, Finite-Burn Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Selenocentric Coordinates and TransformationsDokument9 SeitenSelenocentric Coordinates and TransformationsAnonymous REw1YIq4q7Noch keine Bewertungen
- Pre-Flight Interplanetary Mission AnalysisDokument56 SeitenPre-Flight Interplanetary Mission AnalysisAnonymous REw1YIq4q7Noch keine Bewertungen
- Atmospheric Reentry Trajectory OptimizationDokument30 SeitenAtmospheric Reentry Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- A MATLAB Script For Propagating Interplanetary Trajectories From Earth To MarsDokument36 SeitenA MATLAB Script For Propagating Interplanetary Trajectories From Earth To MarsAnonymous REw1YIq4q7Noch keine Bewertungen
- A MATLAB Script For Propagating Trajectories From The Earth To The MoonDokument33 SeitenA MATLAB Script For Propagating Trajectories From The Earth To The MoonAnonymous REw1YIq4q7Noch keine Bewertungen
- The Gravity Perturbed Hohmann TransferDokument24 SeitenThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7Noch keine Bewertungen
- The Gravity Perturbed Hohmann TransferDokument27 SeitenThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7Noch keine Bewertungen
- Targeting With Modified Equinoctial Orbital ElementsDokument4 SeitenTargeting With Modified Equinoctial Orbital ElementsAnonymous REw1YIq4q7Noch keine Bewertungen
- Two-Body Partial DerivativesDokument6 SeitenTwo-Body Partial DerivativesAnonymous REw1YIq4q7Noch keine Bewertungen
- A Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesDokument17 SeitenA Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesAnonymous REw1YIq4q7Noch keine Bewertungen
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Dokument10 SeitenA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7Noch keine Bewertungen
- Lunar Ascent Trajectory OptimizationDokument30 SeitenLunar Ascent Trajectory OptimizationAnonymous REw1YIq4q7Noch keine Bewertungen
- Generalized Linear Targeting and GuidanceDokument11 SeitenGeneralized Linear Targeting and GuidanceAnonymous REw1YIq4q7Noch keine Bewertungen
- A MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesDokument15 SeitenA MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesAnonymous REw1YIq4q7Noch keine Bewertungen
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Dokument10 SeitenA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7Noch keine Bewertungen
- Creating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Dokument23 SeitenCreating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Anonymous REw1YIq4q7Noch keine Bewertungen
- Optimal Finite-Burn Earth Orbit-to-Interplanetary InjectionDokument46 SeitenOptimal Finite-Burn Earth Orbit-to-Interplanetary InjectionAnonymous REw1YIq4q7Noch keine Bewertungen
- ZET 8 Astrology Software: Welcome Astrological Feature ListDokument254 SeitenZET 8 Astrology Software: Welcome Astrological Feature ListLeombruno BlueNoch keine Bewertungen
- Retrograde Cycles StationsDokument21 SeitenRetrograde Cycles StationsjhgNoch keine Bewertungen
- SAGE MANU, SAGE BHRIGU, DASAVATHARAM PARASHURAMA, AND CYCLES OF YUGAS OR WORLD AGES - Version 5.0.2Dokument43 SeitenSAGE MANU, SAGE BHRIGU, DASAVATHARAM PARASHURAMA, AND CYCLES OF YUGAS OR WORLD AGES - Version 5.0.2Stjepan SpanicekNoch keine Bewertungen
- GPS and Galileo Satellite Coordinates Computation - NavipediaDokument3 SeitenGPS and Galileo Satellite Coordinates Computation - NavipediaandenetNoch keine Bewertungen
- ASTRO Ephemerides - Ephemeris For Year 2014 Astrology & Horoscopes OnlineDokument11 SeitenASTRO Ephemerides - Ephemeris For Year 2014 Astrology & Horoscopes OnlineKrishnaMohanNoch keine Bewertungen
- Estimating The GNSS Broadcast Ephemeris Error - PresentationDokument21 SeitenEstimating The GNSS Broadcast Ephemeris Error - PresentationSebastian CiubanNoch keine Bewertungen
- What's My Moon SignDokument1 SeiteWhat's My Moon Sign노라Noch keine Bewertungen
- LilithDokument3 SeitenLilithOtilia Mazilu0% (1)
- The Easiest Guide To Astrology Trading by Astro Edge TradingDokument28 SeitenThe Easiest Guide To Astrology Trading by Astro Edge TradingVitalii Oliinyk67% (3)
- Cosmic Patterns CatalogDokument56 SeitenCosmic Patterns CatalogjaithilagarajNoch keine Bewertungen
- Planetary Transits Through Nakshatra 1900 - 2050Dokument643 SeitenPlanetary Transits Through Nakshatra 1900 - 2050Varaha Mihira100% (4)
- GPS Baseline Processing SoftwareDokument39 SeitenGPS Baseline Processing SoftwareMinyo IosifNoch keine Bewertungen
- Benjamin Banneker Pioneering Astronomer SurveyorDokument1 SeiteBenjamin Banneker Pioneering Astronomer SurveyorkhunumNoch keine Bewertungen
- Sky Event Almanac 2023 (Indian Standard Time)Dokument6 SeitenSky Event Almanac 2023 (Indian Standard Time)Amol KulkarniNoch keine Bewertungen
- Orbit Determination SoftwareDokument37 SeitenOrbit Determination SoftwareLeonardo ColomboNoch keine Bewertungen
- Heliocentric Astrology GuideDokument13 SeitenHeliocentric Astrology GuideMichael Erlewine75% (4)
- Maxor User ManualDokument142 SeitenMaxor User ManualEstebanLaffitte100% (1)
- Carnes, Todd - 2009 - How To Use An EphemerisDokument5 SeitenCarnes, Todd - 2009 - How To Use An EphemerisKoayeNoch keine Bewertungen
- Ariny Amos (Astronomer) Experiment, Novel, Lunar Theory. International Trade.Dokument618 SeitenAriny Amos (Astronomer) Experiment, Novel, Lunar Theory. International Trade.Amos ArinyNoch keine Bewertungen
- Ephemerides For 65 YearsDokument1.204 SeitenEphemerides For 65 Yearsamitjha2487Noch keine Bewertungen
- Beginners Horoscope Maker and ReaderDokument182 SeitenBeginners Horoscope Maker and Readerfriendz7774634100% (3)
- Discover the predictive power of astrology for trading marketsDokument5 SeitenDiscover the predictive power of astrology for trading marketsGauriGanNoch keine Bewertungen
- Essential Guide to Astrological LiteratureDokument20 SeitenEssential Guide to Astrological LiteratureViviana Puebla100% (4)
- Free Jyotish Books SoftwaresDokument18 SeitenFree Jyotish Books SoftwaresDabhekar Shreepad100% (1)
- Astronomical AlgorithmsDokument12 SeitenAstronomical AlgorithmsOnceoffplease100% (2)
- LilithDokument16 SeitenLilithFangedNimph100% (6)
- Swiss EphemerisDokument55 SeitenSwiss EphemerisAlanGO100% (1)
- Able of Contents: Hiper GD and Hiper GGD Operator'S ManualDokument11 SeitenAble of Contents: Hiper GD and Hiper GGD Operator'S ManualPatricia ReyesNoch keine Bewertungen
- Department of The Army Technical Manual TM 5 237 Surveying Computer S Manual October 1964Dokument236 SeitenDepartment of The Army Technical Manual TM 5 237 Surveying Computer S Manual October 1964Bart Lucena Jr.Noch keine Bewertungen
- The Universal One: An exact science of the One visible and invisible universe of Mind and the registration of all idea of thinking Mind in light, which is matter and also energyVon EverandThe Universal One: An exact science of the One visible and invisible universe of Mind and the registration of all idea of thinking Mind in light, which is matter and also energyBewertung: 4.5 von 5 Sternen4.5/5 (4)
- A Brief History of Time: From the Big Bang to Black HolesVon EverandA Brief History of Time: From the Big Bang to Black HolesBewertung: 4 von 5 Sternen4/5 (2193)
- Across the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsVon EverandAcross the Airless Wilds: The Lunar Rover and the Triumph of the Final Moon LandingsNoch keine Bewertungen
- Beginning and the End of Everything: From the Big Bang to the End of the UniverseVon EverandBeginning and the End of Everything: From the Big Bang to the End of the UniverseBewertung: 5 von 5 Sternen5/5 (61)
- Believing Is Seeing: A Physicist Explains How Science Shattered His Atheism and Revealed the Necessity of FaithVon EverandBelieving Is Seeing: A Physicist Explains How Science Shattered His Atheism and Revealed the Necessity of FaithBewertung: 5 von 5 Sternen5/5 (32)
- When the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyVon EverandWhen the Earth Had Two Moons: Cannibal Planets, Icy Giants, Dirty Comets, Dreadful Orbits, and the Origins of the Night SkyBewertung: 3 von 5 Sternen3/5 (7)
- You Are Here: A Portable History of the UniverseVon EverandYou Are Here: A Portable History of the UniverseBewertung: 4 von 5 Sternen4/5 (30)
- Mercury in Retrograde: And Other Ways the Stars Can Teach You to Live Your Truth, Find Your Power, and Hear the Call of the UniverseVon EverandMercury in Retrograde: And Other Ways the Stars Can Teach You to Live Your Truth, Find Your Power, and Hear the Call of the UniverseBewertung: 5 von 5 Sternen5/5 (5)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (1104)
- The Creator and the Cosmos: How the Latest Scientific Discoveries Reveal GodVon EverandThe Creator and the Cosmos: How the Latest Scientific Discoveries Reveal GodBewertung: 5 von 5 Sternen5/5 (4)
- The Book of the Moon: A Guide to Our Closest NeighborVon EverandThe Book of the Moon: A Guide to Our Closest NeighborBewertung: 4.5 von 5 Sternen4.5/5 (11)
- The Varieties of Scientific Experience: A Personal View of the Search for GodVon EverandThe Varieties of Scientific Experience: A Personal View of the Search for GodBewertung: 4.5 von 5 Sternen4.5/5 (272)
- The Accelerating Universe: Infinite Expansion, the Cosmological Constant, and the Beauty of the CosmosVon EverandThe Accelerating Universe: Infinite Expansion, the Cosmological Constant, and the Beauty of the CosmosBewertung: 4 von 5 Sternen4/5 (25)
- The Extraterrestrial Species Almanac: The Ultimate Guide to Greys, Reptilians, Hybrids, and NordicsVon EverandThe Extraterrestrial Species Almanac: The Ultimate Guide to Greys, Reptilians, Hybrids, and NordicsBewertung: 4.5 von 5 Sternen4.5/5 (37)
- The Holographic Universe: The Revolutionary Theory of RealityVon EverandThe Holographic Universe: The Revolutionary Theory of RealityBewertung: 4.5 von 5 Sternen4.5/5 (75)
- Under Alien Skies: A Sightseer's Guide to the UniverseVon EverandUnder Alien Skies: A Sightseer's Guide to the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (16)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormVon EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormBewertung: 5 von 5 Sternen5/5 (5)
- Black Holes: The Key to Understanding the UniverseVon EverandBlack Holes: The Key to Understanding the UniverseBewertung: 4.5 von 5 Sternen4.5/5 (13)
- The End of Everything: (Astrophysically Speaking)Von EverandThe End of Everything: (Astrophysically Speaking)Bewertung: 4.5 von 5 Sternen4.5/5 (155)
- The Zodiac by Degrees: Second Edition, Extensively RevisedVon EverandThe Zodiac by Degrees: Second Edition, Extensively RevisedBewertung: 4.5 von 5 Sternen4.5/5 (22)
- The Theory of Everything: The Origin and Fate of the UniverseVon EverandThe Theory of Everything: The Origin and Fate of the UniverseBewertung: 3.5 von 5 Sternen3.5/5 (2)