Das könnte Ihnen auch gefallen
- Microprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureVon EverandMicroprocessors & their Operating Systems: A Comprehensive Guide to 8, 16 & 32 Bit Hardware, Assembly Language & Computer ArchitectureBewertung: 1 von 5 Sternen1/5 (1)
- BANK SECURITY SYSTEM WITH AUTO DIALER NewDokument21 SeitenBANK SECURITY SYSTEM WITH AUTO DIALER NewCrispNoch keine Bewertungen
- Prepaid Card Petrol BankDokument67 SeitenPrepaid Card Petrol Bankimran kadriNoch keine Bewertungen
- 8051 Microcontroller: An Applications Based IntroductionVon Everand8051 Microcontroller: An Applications Based IntroductionBewertung: 5 von 5 Sternen5/5 (6)
- Cte7 131 Electricity TheftDokument62 SeitenCte7 131 Electricity TheftInitz TechnologiesNoch keine Bewertungen
- Bomb Detecting RobotDokument80 SeitenBomb Detecting RobotInitz TechnologiesNoch keine Bewertungen
- CEP7 - 161 - Solar Tracking SystemDokument62 SeitenCEP7 - 161 - Solar Tracking SystemInitz TechnologiesNoch keine Bewertungen
- Eight-Bit Microcontrollers: Manufacturer:mode L Pins I/O Counter RAM (Bytes) ROM (Bytes) Orther FeaturesDokument6 SeitenEight-Bit Microcontrollers: Manufacturer:mode L Pins I/O Counter RAM (Bytes) ROM (Bytes) Orther FeaturesAfiv SetyajiNoch keine Bewertungen
- Industrial Motor MonitorDokument67 SeitenIndustrial Motor MonitorInitz TechnologiesNoch keine Bewertungen
- 8051 Notes NewDokument70 Seiten8051 Notes NewWajahatNoch keine Bewertungen
- Introduction To The Microprocefghgfhgfhdgf AND Development of MicrocontrollersDokument13 SeitenIntroduction To The Microprocefghgfhgfhdgf AND Development of Microcontrollersrjawy alasadyNoch keine Bewertungen
- Introduction To Microcontrollers and Applications: Protected 8051 Class 01 Version 1.0 1Dokument27 SeitenIntroduction To Microcontrollers and Applications: Protected 8051 Class 01 Version 1.0 1bharathamNoch keine Bewertungen
- Transmission Line Multiple Fault Detection and Indication To Electricity BoardDokument74 SeitenTransmission Line Multiple Fault Detection and Indication To Electricity BoardCrisp100% (1)
- 1 Pengenalan Bahasa Assembly 20150226Dokument48 Seiten1 Pengenalan Bahasa Assembly 20150226Muhd Muhd Hasif100% (1)
- Microcontroller SlideDokument48 SeitenMicrocontroller Slidesyahmimisahfani100% (2)
- UNIT-5: 8051 MicrocontrollerDokument25 SeitenUNIT-5: 8051 MicrocontrollerSachin KhandelwalNoch keine Bewertungen
- Overview of Microcontrollers, Embedded Control and The Motorola HC12 FamilyDokument15 SeitenOverview of Microcontrollers, Embedded Control and The Motorola HC12 FamilyJuanNoch keine Bewertungen
- Contactless Tachometer With Motor Speed ControlDokument30 SeitenContactless Tachometer With Motor Speed Control27051977Noch keine Bewertungen
- 8051 Microcontroller: Unit - 5Dokument42 Seiten8051 Microcontroller: Unit - 5Varun Hm ReddyNoch keine Bewertungen
- MPMC 8051 MC Ay 2021-22Dokument202 SeitenMPMC 8051 MC Ay 2021-22kambam swarna kanth reddyNoch keine Bewertungen
- MP-MC R16 - Unit-5Dokument52 SeitenMP-MC R16 - Unit-5satyanarayana12Noch keine Bewertungen
- Human Detection RobotDokument16 SeitenHuman Detection Robotdabangajay50% (2)
- Microprocessor and Programming 4TH SEM CM-IfDokument174 SeitenMicroprocessor and Programming 4TH SEM CM-IfAbha SinghNoch keine Bewertungen
- Micro Controller Archtecture ProgrammingDokument94 SeitenMicro Controller Archtecture ProgrammingyayavaramNoch keine Bewertungen
- Project VIII Final ReportDokument32 SeitenProject VIII Final Reportdvndr_shrwt2097Noch keine Bewertungen
- Difference Between Microprocessor and MicrocontrollerDokument17 SeitenDifference Between Microprocessor and MicrocontrollervedhajuvalNoch keine Bewertungen
- PC Interfacing Fourth Level Lecture Eight RS232 To PIC Microcontroller InterfaceDokument15 SeitenPC Interfacing Fourth Level Lecture Eight RS232 To PIC Microcontroller Interfaceأسامة المياحيNoch keine Bewertungen
- PC Controlled Wireless Multipurpose Robot For Surveillance SystemDokument41 SeitenPC Controlled Wireless Multipurpose Robot For Surveillance SystemFiroz Ahmed KhanNoch keine Bewertungen
- Permanent Switch Board ContentDokument56 SeitenPermanent Switch Board ContentCrispNoch keine Bewertungen
- Micro ControllerDokument63 SeitenMicro ControllersriscribdNoch keine Bewertungen
- Prepaid Energy MeterDokument69 SeitenPrepaid Energy Metervinayarav0% (1)
- Human Detection Robot Electrical Project IdeaDokument41 SeitenHuman Detection Robot Electrical Project IdeaHarish IyerNoch keine Bewertungen
- 8051 Final NoteDokument42 Seiten8051 Final NotedurgaprasadNoch keine Bewertungen
- Microprocessor Systems: MicrocontrollersDokument26 SeitenMicroprocessor Systems: MicrocontrollersApple WrightNoch keine Bewertungen
- IMXRT1050CECDokument93 SeitenIMXRT1050CECjxjinNoch keine Bewertungen
- Chapter 2 - Embedded System ProcessorsDokument7 SeitenChapter 2 - Embedded System ProcessorsStephanie CalabungNoch keine Bewertungen
- 8258I Service ManualDokument148 Seiten8258I Service ManualFabio CurtyNoch keine Bewertungen
- DocumentDokument64 SeitenDocumentpallesreeja0% (1)
- 8051 Unit 1 NotesDokument19 Seiten8051 Unit 1 NotesSOMESH B S100% (13)
- CDC 3231G-C Automotive Controller: MicronasDokument36 SeitenCDC 3231G-C Automotive Controller: Micronas高立璋Noch keine Bewertungen
- 8051 MicrocontrollerDokument40 Seiten8051 MicrocontrollerHiru Purushothaman Hirudayanathan100% (1)
- Unit-4 8051 MicrocontrollerDokument34 SeitenUnit-4 8051 MicrocontrollerMohammed AbdulAzizNoch keine Bewertungen
- Laptop Mitac 8355 Taiwan Service ManualDokument208 SeitenLaptop Mitac 8355 Taiwan Service ManualRendy Adam FarhanNoch keine Bewertungen
- 8051 LAB Manual NewDokument189 Seiten8051 LAB Manual New9491104570100% (2)
- Netduino PlusDokument5 SeitenNetduino PlusMohammed Fadhl AlbadwiNoch keine Bewertungen
- IOT Based Automatic Car Parking SystemDokument29 SeitenIOT Based Automatic Car Parking SystemMOHAMMAD ASLAMNoch keine Bewertungen
- 8051 MicrcontrollerDokument7 Seiten8051 MicrcontrollerRAMESH MIRDHANoch keine Bewertungen
- Mircroprocessor Systems and InterfacingDokument72 SeitenMircroprocessor Systems and InterfacingMuaz ShahidNoch keine Bewertungen
- Ingenic Semiconductor Co. LTD Jz7420 Multimedia Application Processor. Data Sheet. Revision 0.3 November 2007Dokument38 SeitenIngenic Semiconductor Co. LTD Jz7420 Multimedia Application Processor. Data Sheet. Revision 0.3 November 2007Lenina Viktoriya TeknyetovaNoch keine Bewertungen
- MicroprocessorDokument3 SeitenMicroprocessorGairik ChandaNoch keine Bewertungen
- 4.1 Introduction and Features of 8051Dokument4 Seiten4.1 Introduction and Features of 8051Smarajit MishraNoch keine Bewertungen
- Micro Controller Trainer ManualDokument30 SeitenMicro Controller Trainer ManualMadiha Sher100% (1)
- Sample 1828Dokument16 SeitenSample 1828Abhishek GurchalNoch keine Bewertungen
- Architecture and Hardware LecDokument82 SeitenArchitecture and Hardware LecMuhammad BilalNoch keine Bewertungen
- ASIC Technology For The Implementation of System-on-a-Chip: Takayuki Suzuki Kaoru SaitoDokument7 SeitenASIC Technology For The Implementation of System-on-a-Chip: Takayuki Suzuki Kaoru Saitoark arkNoch keine Bewertungen
- Asynchronous I-III (Austria, Jiever Neil N.)Dokument11 SeitenAsynchronous I-III (Austria, Jiever Neil N.)Jiever AustriaNoch keine Bewertungen
- Gsm-Gps Vehicle Theft Control SystemDokument78 SeitenGsm-Gps Vehicle Theft Control SystemMrunalini Spandana100% (1)
- Poriyaan 1saxvBL6xpqZak6jOwx mFCPlMixrGDZmDokument37 SeitenPoriyaan 1saxvBL6xpqZak6jOwx mFCPlMixrGDZmS. GobikaNoch keine Bewertungen
- MicrocontrollerDokument23 SeitenMicrocontrollerANKIT PATHAKNoch keine Bewertungen
- CHC0002 Diverse IoT Based Gadgets To Update A Moderate Condition of Farmers in IndiaDokument5 SeitenCHC0002 Diverse IoT Based Gadgets To Update A Moderate Condition of Farmers in IndiaCrispNoch keine Bewertungen
- HC 05 BluetoothDokument5 SeitenHC 05 BluetoothCrispNoch keine Bewertungen
- Automatic Unauthorized Parking Detector With SMS Notification To OwnerDokument2 SeitenAutomatic Unauthorized Parking Detector With SMS Notification To OwnerCrisp50% (2)
- Fire SensorDokument2 SeitenFire SensorCrispNoch keine Bewertungen
- Automatic Toll e Ticketing System For Transportation SystemsDokument4 SeitenAutomatic Toll e Ticketing System For Transportation SystemsCrispNoch keine Bewertungen
- Digital Ic TesterDokument2 SeitenDigital Ic TesterCrispNoch keine Bewertungen
- Data Acquisition System Development For A Hydraulic Plant Using Hybrid Communication Network Based On LoRaDokument6 SeitenData Acquisition System Development For A Hydraulic Plant Using Hybrid Communication Network Based On LoRaCrispNoch keine Bewertungen
- Internet of ThingsDokument5 SeitenInternet of ThingsCrispNoch keine Bewertungen
- Moisture Sensor: SpecificationsDokument2 SeitenMoisture Sensor: SpecificationsCrispNoch keine Bewertungen
- IoT Based Smart Waste Management System Using ArduinoDokument3 SeitenIoT Based Smart Waste Management System Using ArduinoCrispNoch keine Bewertungen
- Air Pollution and Insurance Based VehicleDokument5 SeitenAir Pollution and Insurance Based VehicleCrispNoch keine Bewertungen
- Automatic Car Parking SystemDokument2 SeitenAutomatic Car Parking SystemCrispNoch keine Bewertungen
- 2.voice Operated Induction Motor Speed Control Through RF CommunicationDokument2 Seiten2.voice Operated Induction Motor Speed Control Through RF CommunicationCrisp100% (1)
- Automatic Ambulance Rescue SystemDokument4 SeitenAutomatic Ambulance Rescue SystemCrispNoch keine Bewertungen
- 1.atm Security SystemDokument2 Seiten1.atm Security SystemCrispNoch keine Bewertungen
- Power Failures Auto Alert Announcement System in HomeDokument3 SeitenPower Failures Auto Alert Announcement System in HomeCrispNoch keine Bewertungen
- Street Light That Glow On Detecting Vehicle Movement Cte0058Dokument2 SeitenStreet Light That Glow On Detecting Vehicle Movement Cte0058CrispNoch keine Bewertungen
- Air Pollution Measurement Using Embedded SystemDokument3 SeitenAir Pollution Measurement Using Embedded SystemCrispNoch keine Bewertungen
- SCE27. .IoT Based Real-Time Residential Energy MeterDokument3 SeitenSCE27. .IoT Based Real-Time Residential Energy MeterCrispNoch keine Bewertungen
- Design Verification: Yland BaDokument15 SeitenDesign Verification: Yland BasivajiNoch keine Bewertungen
- DTC Manual EngDokument12 SeitenDTC Manual EngDiego RodriguezNoch keine Bewertungen
- Ug Ml200 Dido Module 200Dokument74 SeitenUg Ml200 Dido Module 200pandhuNoch keine Bewertungen
- 3d IcDokument1 Seite3d IcAbhijithNoch keine Bewertungen
- CS 2252 - Microprocessors and Microcontrollers PDFDokument2 SeitenCS 2252 - Microprocessors and Microcontrollers PDFvelkarthi92Noch keine Bewertungen
- Lecture05 - 8086 AssemblyDokument43 SeitenLecture05 - 8086 Assemblytesfu zewduNoch keine Bewertungen
- CPE400 Lab8 ARCONADO DEVELLES 2 PDFDokument10 SeitenCPE400 Lab8 ARCONADO DEVELLES 2 PDFKimNoch keine Bewertungen
- Lecture 9 - Transistor Biasing CircuitsDokument27 SeitenLecture 9 - Transistor Biasing CircuitsWillian CarlosNoch keine Bewertungen
- Instructions For Upgrading: REV Description Date ApprovedDokument6 SeitenInstructions For Upgrading: REV Description Date ApprovedOscar Mauricio GomezNoch keine Bewertungen
- Vicon Camera Power Supply ChartDokument17 SeitenVicon Camera Power Supply ChartJuan Jose SaavedraNoch keine Bewertungen
- Micromon Ma400: Welcome To BEHRINGERDokument2 SeitenMicromon Ma400: Welcome To BEHRINGERpmacs10Noch keine Bewertungen
- Fault CodesDokument6 SeitenFault CodesLuis Miguel Mojica AgudeloNoch keine Bewertungen
- GFK 0467lseries90 30 20 MicroPLCCPUInstructionSetReferenceManualDokument313 SeitenGFK 0467lseries90 30 20 MicroPLCCPUInstructionSetReferenceManualDawit Giday100% (1)
- The Federal University of Technology Akure, Ondo StateDokument5 SeitenThe Federal University of Technology Akure, Ondo StatetarvsNoch keine Bewertungen
- EL640400-CB1-CB3 and CD4 - MN PDFDokument24 SeitenEL640400-CB1-CB3 and CD4 - MN PDFtrutleptNoch keine Bewertungen
- Ds 1038Dokument2 SeitenDs 1038api-345043542Noch keine Bewertungen
- Reference Manual: PC1616 / PC1832 / PC1864Dokument68 SeitenReference Manual: PC1616 / PC1832 / PC1864bfahmed1100% (2)
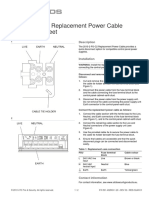
- 501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDokument2 Seiten501-402803-1-20 (EN) R02 2010-2-PS-C2 Replacement Power Cable Installation SheetDanNoch keine Bewertungen
- Single Phase Three Leg Ac/ac ConverterDokument8 SeitenSingle Phase Three Leg Ac/ac ConvertermycatalystsNoch keine Bewertungen
- Lab Report 11Dokument6 SeitenLab Report 11James Lemuel MallapreNoch keine Bewertungen
- Variable-Switching-Frequency Single-Stage Bidirectional GaN ACDC Converter For The Grid-Tied Battery Energy Storage SystemDokument11 SeitenVariable-Switching-Frequency Single-Stage Bidirectional GaN ACDC Converter For The Grid-Tied Battery Energy Storage Systemy87387218Noch keine Bewertungen
- 1 Phase Controlled RectifierDokument34 Seiten1 Phase Controlled RectifierAfiq BobbyNoch keine Bewertungen
- Canon Error CodesDokument42 SeitenCanon Error CodesArian1980Noch keine Bewertungen
- BERKLYNInformation SheetDokument6 SeitenBERKLYNInformation SheetvillatoreubenNoch keine Bewertungen
- PAA600F 48 Cosel Datasheet 9676513 PDFDokument3 SeitenPAA600F 48 Cosel Datasheet 9676513 PDFJose HernandezNoch keine Bewertungen
- Extremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description FeaturesDokument20 SeitenExtremely Accurate I C-Integrated RTC/TCXO/Crystal: General Description Features21xim21Noch keine Bewertungen
- Introduction To Piezoelectric Pressure SensorsDokument4 SeitenIntroduction To Piezoelectric Pressure SensorsSameh AhmedNoch keine Bewertungen
- Accuphase E-308 Stereo AmplDokument4 SeitenAccuphase E-308 Stereo AmplschaiNoch keine Bewertungen
- PC481 Course Note1ádDokument31 SeitenPC481 Course Note1ádLê Nguyễn Bảo DuyNoch keine Bewertungen
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (230)
- Cyber-Physical Systems: Foundations, Principles and ApplicationsVon EverandCyber-Physical Systems: Foundations, Principles and ApplicationsHoubing H. SongNoch keine Bewertungen
- CISSP All-in-One Exam Guide, Ninth EditionVon EverandCISSP All-in-One Exam Guide, Ninth EditionBewertung: 5 von 5 Sternen5/5 (1)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Von EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Bewertung: 5 von 5 Sternen5/5 (2)
- iPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsVon EverandiPhone 14 Guide for Seniors: Unlocking Seamless Simplicity for the Golden Generation with Step-by-Step ScreenshotsBewertung: 5 von 5 Sternen5/5 (5)
- Computer Science: A Concise IntroductionVon EverandComputer Science: A Concise IntroductionBewertung: 4.5 von 5 Sternen4.5/5 (14)
- Arduino and Raspberry Pi Sensor Projects for the Evil GeniusVon EverandArduino and Raspberry Pi Sensor Projects for the Evil GeniusNoch keine Bewertungen
- Chip War: The Fight for the World's Most Critical TechnologyVon EverandChip War: The Fight for the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (82)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Von EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Bewertung: 5 von 5 Sternen5/5 (2)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionVon EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionBewertung: 5 von 5 Sternen5/5 (2)
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XVon EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XBewertung: 3 von 5 Sternen3/5 (2)
- iPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Von EverandiPhone Unlocked for the Non-Tech Savvy: Color Images & Illustrated Instructions to Simplify the Smartphone Use for Beginners & Seniors [COLOR EDITION]Bewertung: 5 von 5 Sternen5/5 (5)
- The comprehensive guide to build Raspberry Pi 5 RoboticsVon EverandThe comprehensive guide to build Raspberry Pi 5 RoboticsNoch keine Bewertungen
- How To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsVon EverandHow To Market Mobile Apps: Your Step By Step Guide To Marketing Mobile AppsNoch keine Bewertungen
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Von EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Bewertung: 5 von 5 Sternen5/5 (1)
- Unlock Any Roku Device: Watch Shows, TV, & Download AppsVon EverandUnlock Any Roku Device: Watch Shows, TV, & Download AppsNoch keine Bewertungen
- CompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Von EverandCompTIA A+ Complete Practice Tests: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Noch keine Bewertungen
- Raspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideVon EverandRaspberry PI: Learn Rasberry Pi Programming the Easy Way, A Beginner Friendly User GuideNoch keine Bewertungen
- Jensen Huang's Nvidia: Processing the Mind of Artificial IntelligenceVon EverandJensen Huang's Nvidia: Processing the Mind of Artificial IntelligenceNoch keine Bewertungen
- Creative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsVon EverandCreative Selection: Inside Apple's Design Process During the Golden Age of Steve JobsBewertung: 4.5 von 5 Sternen4.5/5 (49)
- Samsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneVon EverandSamsung Galaxy S22 Ultra User Guide For Beginners: The Complete User Manual For Getting Started And Mastering The Galaxy S22 Ultra Android PhoneNoch keine Bewertungen
- iPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneVon EverandiPhone Photography: A Ridiculously Simple Guide To Taking Photos With Your iPhoneNoch keine Bewertungen