Das könnte Ihnen auch gefallen
- Analisis de Las Rutinas de Definicion PDFDokument4 SeitenAnalisis de Las Rutinas de Definicion PDFstevencardenasNoch keine Bewertungen
- Ejercicios de Ecuaciones Diferenciales OrdinariasVon EverandEjercicios de Ecuaciones Diferenciales OrdinariasBewertung: 4 von 5 Sternen4/5 (1)
- Razonamiento cuantitativo, 2ª edición: Notas de claseVon EverandRazonamiento cuantitativo, 2ª edición: Notas de claseBewertung: 5 von 5 Sternen5/5 (1)
- Ejercicios Resueltos ZillDokument265 SeitenEjercicios Resueltos ZillJ Deep AguirreNoch keine Bewertungen
- La ecuación general de segundo grado en dos y tres variablesVon EverandLa ecuación general de segundo grado en dos y tres variablesNoch keine Bewertungen
- Escala Estimativa de Mapa ConceptualDokument2 SeitenEscala Estimativa de Mapa ConceptualMariellRoblesNoch keine Bewertungen
- Auditoria Semana 8Dokument6 SeitenAuditoria Semana 8abi nuñezNoch keine Bewertungen
- Sistema de Ecuaciones Diferenciales de Coeficientes ConstantesDokument4 SeitenSistema de Ecuaciones Diferenciales de Coeficientes ConstantesgustavoNoch keine Bewertungen
- TALLER SOBRE AUTOESTIMA - UnlockedDokument128 SeitenTALLER SOBRE AUTOESTIMA - UnlockedZuley Natalia NarvaezNoch keine Bewertungen
- Conf 6 Sistemas de Ecuaciones DiferencialesDokument9 SeitenConf 6 Sistemas de Ecuaciones Diferencialespedro pabloNoch keine Bewertungen
- ED Relacion 5 MATEMATICAS II UJAENDokument6 SeitenED Relacion 5 MATEMATICAS II UJAENAndrés C BriceñoNoch keine Bewertungen
- La Metodología de Vectores Autorregresivos (Var)Dokument26 SeitenLa Metodología de Vectores Autorregresivos (Var)J Luis ChNoch keine Bewertungen
- Biomatemáticas - 5. Modelos Multidimensionales en BiologíaDokument40 SeitenBiomatemáticas - 5. Modelos Multidimensionales en BiologíaCarlosNoch keine Bewertungen
- Hoja de PresentacionDokument35 SeitenHoja de PresentacionAlberto JimenezNoch keine Bewertungen
- Sistema Edo Piero Sanchez.Dokument4 SeitenSistema Edo Piero Sanchez.Franshesco Sánchez :vNoch keine Bewertungen
- 11 Sistemas de Ecuaciones DiferencialesDokument34 Seiten11 Sistemas de Ecuaciones DiferencialesJose LopezNoch keine Bewertungen
- Sistema de Ecuaciones Mediante Matriz FundamentalDokument4 SeitenSistema de Ecuaciones Mediante Matriz FundamentalEcuaciones DiferencialesNoch keine Bewertungen
- Texto - Cap 2 (Libro Prof. Maulio Rodríguez) PDFDokument62 SeitenTexto - Cap 2 (Libro Prof. Maulio Rodríguez) PDFMoises David CNoch keine Bewertungen
- SistemasDokument38 SeitenSistemasJosé Apaza balceraNoch keine Bewertungen
- Ecuaciones de EstadoDokument8 SeitenEcuaciones de Estado...Noch keine Bewertungen
- Análisis Cualitativo de Sistemas Autónomos LinealesDokument2 SeitenAnálisis Cualitativo de Sistemas Autónomos Linealesbartle290171Noch keine Bewertungen
- Unidad 5 - Ecuaciones DiferencialesDokument55 SeitenUnidad 5 - Ecuaciones DiferencialesJulio c Resendiz100% (1)
- Clase1 13 8 18Dokument9 SeitenClase1 13 8 18Juan ViscaNoch keine Bewertungen
- Descripcion Matematica de SistemasDokument52 SeitenDescripcion Matematica de SistemasValerio QuinteroNoch keine Bewertungen
- Corrección Segundo Parcial II 20006, Cálculo IIIDokument11 SeitenCorrección Segundo Parcial II 20006, Cálculo IIIHans Müller Santa Cruz0% (1)
- E Ejercicios Resueltos Analisis Lineal Ecuaciones Diferenciales Ordinarias de Segundo OrdenDokument9 SeitenE Ejercicios Resueltos Analisis Lineal Ecuaciones Diferenciales Ordinarias de Segundo OrdenJavier MartinezNoch keine Bewertungen
- Ecuaciones en DiferenciasDokument32 SeitenEcuaciones en DiferenciasxarkhamNoch keine Bewertungen
- Sistemas Amortiguados de Dos Grados de LibertadDokument16 SeitenSistemas Amortiguados de Dos Grados de LibertadXavier Freire ZamoraNoch keine Bewertungen
- Unidad 4. Sistemas de Ecuaciones DiferencialesDokument28 SeitenUnidad 4. Sistemas de Ecuaciones DiferencialesElliot MenaNoch keine Bewertungen
- Corrección Segundo Parcial de Cálculo III, 19 de Junio (Tarde) de 2017Dokument6 SeitenCorrección Segundo Parcial de Cálculo III, 19 de Junio (Tarde) de 2017Hans Müller Santa Cruz100% (2)
- EdosDokument9 SeitenEdosMauricio AnselmiNoch keine Bewertungen
- Sistemas Definidos Por Ecuaciones en DiferenciaDokument12 SeitenSistemas Definidos Por Ecuaciones en DiferenciaJuan Carlos PintoNoch keine Bewertungen
- Metodo de OperadoresDokument10 SeitenMetodo de OperadoresDaniel Hernández GaliciaNoch keine Bewertungen
- Solucion de Sistemas Lineales Por EliminacionDokument7 SeitenSolucion de Sistemas Lineales Por Eliminacioncinthia chissela diaz vegaNoch keine Bewertungen
- Analisis Entrada Salida de Sistemas en El TiempoDokument6 SeitenAnalisis Entrada Salida de Sistemas en El TiempoSebastián Muñoz AndradeNoch keine Bewertungen
- Estabilidad en Sistemas de Ecuaciones DiferencialesDokument18 SeitenEstabilidad en Sistemas de Ecuaciones DiferencialesEduGrecoNoch keine Bewertungen
- ED04Dokument104 SeitenED04Irene GarcíaNoch keine Bewertungen
- Capitulo 5 Analisis de Sistemas de Control en El Dominio Del TiempoDokument56 SeitenCapitulo 5 Analisis de Sistemas de Control en El Dominio Del TiempoJuan ApazaNoch keine Bewertungen
- Vibraciones de Sistemas, Tema 5Dokument30 SeitenVibraciones de Sistemas, Tema 5JavulicraftNoch keine Bewertungen
- Sistemas de Ecuaciones DiferencialesDokument19 SeitenSistemas de Ecuaciones DiferencialesAlan Rafael Oberto JimenezNoch keine Bewertungen
- Algoritmos Ecuaciones Diferenciales OrdinariasDokument6 SeitenAlgoritmos Ecuaciones Diferenciales Ordinariasxabihdez0% (1)
- Ejercicios Econometria IDokument10 SeitenEjercicios Econometria ICamila Meléndez MardonesNoch keine Bewertungen
- Corrección Segundo Parcial de Cálculo III, 20 de Junio de 2017Dokument6 SeitenCorrección Segundo Parcial de Cálculo III, 20 de Junio de 2017Hans Müller Santa CruzNoch keine Bewertungen
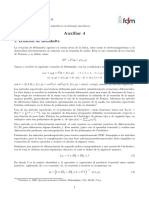
- Auxiliar 4Dokument8 SeitenAuxiliar 4Camilo Eduardo Avilés QuintanillaNoch keine Bewertungen
- 2do Bachillerato Clase 11 Ingles 2Dokument6 Seiten2do Bachillerato Clase 11 Ingles 2Andersson PalloNoch keine Bewertungen
- 2do Bachillerato Clase 11 Ingles 1Dokument7 Seiten2do Bachillerato Clase 11 Ingles 1Andersson PalloNoch keine Bewertungen
- 2do Bachillerato Clase 14 Ingles 1Dokument5 Seiten2do Bachillerato Clase 14 Ingles 1Andersson PalloNoch keine Bewertungen
- 2do Bachillerato Clase 6 InglesDokument6 Seiten2do Bachillerato Clase 6 InglesAndersson PalloNoch keine Bewertungen
- 2do Bachillerato Clase 8 InglesDokument6 Seiten2do Bachillerato Clase 8 InglesAndersson PalloNoch keine Bewertungen
- 2do Bachillerato Clase 7 InglesDokument3 Seiten2do Bachillerato Clase 7 InglesAndersson PalloNoch keine Bewertungen
- Flujo PermanenteDokument6 SeitenFlujo PermanenteAndersson PalloNoch keine Bewertungen
- CIE9Dokument11 SeitenCIE9neurologia higaNoch keine Bewertungen
- Habilidades Linguisticas PreDokument7 SeitenHabilidades Linguisticas PreJesica Arias VeraNoch keine Bewertungen
- La Normativa LingüísticaDokument12 SeitenLa Normativa LingüísticaYaira CerdasNoch keine Bewertungen
- Guía de Trabajo Cálculo - Límites de Funciones I PDFDokument13 SeitenGuía de Trabajo Cálculo - Límites de Funciones I PDFValeryjisset BautistaamayaNoch keine Bewertungen
- GEOMARKETINGDokument13 SeitenGEOMARKETINGLizbethReyesONoch keine Bewertungen
- Programacion Anual y Bimestral 4to Grado SecunDokument21 SeitenProgramacion Anual y Bimestral 4to Grado SecunLucero Criollo abadNoch keine Bewertungen
- Conjuntos #1.1Dokument2 SeitenConjuntos #1.1Naya RoaNoch keine Bewertungen
- Proyecto 5: Construimos Un Pais Libre de Discriminacion Con Una Ciudadania Critica Y ActivaDokument5 SeitenProyecto 5: Construimos Un Pais Libre de Discriminacion Con Una Ciudadania Critica Y ActivaAriadne GarciaNoch keine Bewertungen
- Elvira Ávila, Reporte de Lectura, MartínDokument2 SeitenElvira Ávila, Reporte de Lectura, MartínElvira Avila ElviraNoch keine Bewertungen
- Trastorno Mixto 2Dokument11 SeitenTrastorno Mixto 2Marina Estrada RodriguezNoch keine Bewertungen
- Tarea en Grupo. Estadistica para Administracion y Economia PDFDokument3 SeitenTarea en Grupo. Estadistica para Administracion y Economia PDFcebollita rosa0% (1)
- Los Zombies FilosóficosDokument11 SeitenLos Zombies FilosóficosJonnny B. GoodeNoch keine Bewertungen
- Resumen Inventario Modelo de Gestion de OperacionesDokument4 SeitenResumen Inventario Modelo de Gestion de OperacionesRafael Sepulveda RojasNoch keine Bewertungen
- Presente Perfecto (Present Perfect Tense)Dokument2 SeitenPresente Perfecto (Present Perfect Tense)Nelly LGNoch keine Bewertungen
- Examen Final Calculo 2Dokument5 SeitenExamen Final Calculo 2sub2 pewdiepieNoch keine Bewertungen
- Libro35 - V3Manual Interacciones MedicamentosasDokument285 SeitenLibro35 - V3Manual Interacciones MedicamentosasRicardo100% (1)
- Presupuesto Bajo CeroDokument6 SeitenPresupuesto Bajo Cerodbarbosa9709Noch keine Bewertungen
- Normas APADokument34 SeitenNormas APAricardogeNoch keine Bewertungen
- La Nube Errante PDFDokument5 SeitenLa Nube Errante PDFVíctor MarabolíNoch keine Bewertungen
- Resumen de Ética para Amador, Sofia Cardona.Dokument4 SeitenResumen de Ética para Amador, Sofia Cardona.ANA SOFIA CARDONA ARANGONoch keine Bewertungen
- Libro 2 Guia Semanal 8Dokument40 SeitenLibro 2 Guia Semanal 8claudialinareNoch keine Bewertungen
- M4 - Auditorías en Sistemas de Información PDFDokument20 SeitenM4 - Auditorías en Sistemas de Información PDFMarcelo AndradeNoch keine Bewertungen
- InfografiaDokument3 SeitenInfografiaMaria GAbriela Garcia AguileraNoch keine Bewertungen
- Muy Gagsioso, MagiaDokument32 SeitenMuy Gagsioso, MagiatatomenducoNoch keine Bewertungen
- Guía Didactica para Enseñanza-Aprendizaje. - 9noDokument5 SeitenGuía Didactica para Enseñanza-Aprendizaje. - 9noMayerli Janeth Caballero DiazNoch keine Bewertungen
- Informe Corto Análisis Farmacéutico Carolina Zapata-Katherine Barrera Sánchez Ficha 2359682Dokument6 SeitenInforme Corto Análisis Farmacéutico Carolina Zapata-Katherine Barrera Sánchez Ficha 2359682Katherine BarreraNoch keine Bewertungen