Das könnte Ihnen auch gefallen
- Exploring Arduino: Tools and Techniques for Engineering WizardryVon EverandExploring Arduino: Tools and Techniques for Engineering WizardryBewertung: 4.5 von 5 Sternen4.5/5 (5)
- GEH-6126 Vol I PDFDokument134 SeitenGEH-6126 Vol I PDFAbuk SabukNoch keine Bewertungen
- Obstacle Avoiding RobotDokument17 SeitenObstacle Avoiding RobotNishant Kamal93% (15)
- Arduino Programming For ESD: by MD - Dedarul HasanDokument38 SeitenArduino Programming For ESD: by MD - Dedarul HasandedarulNoch keine Bewertungen
- ArduinoDokument14 SeitenArduinowmarasigan2610Noch keine Bewertungen
- Asl Ga75 PDFDokument76 SeitenAsl Ga75 PDFMarco Soto100% (1)
- Arduino LectureDokument52 SeitenArduino LectureSỹ RonNoch keine Bewertungen
- Crossconnect Multiplexer CMXC User ManualDokument156 SeitenCrossconnect Multiplexer CMXC User ManualrzhevskiyNoch keine Bewertungen
- Railway Track Crack DetectionDokument31 SeitenRailway Track Crack DetectionJyothi Manne0% (1)
- Arduino TutorialDokument26 SeitenArduino TutorialsrujanNoch keine Bewertungen
- TachoDokument55 SeitenTachoRaja BabuNoch keine Bewertungen
- Line Follower RobotDokument16 SeitenLine Follower RobotRohit sharmaNoch keine Bewertungen
- Project ManagementDokument34 SeitenProject ManagementFarhan TariqNoch keine Bewertungen
- Line Follower RobotDokument16 SeitenLine Follower RobotVenkat Munnangi100% (1)
- Automatic Railway Gate Control SystemDokument5 SeitenAutomatic Railway Gate Control SystemTasnim RahmanNoch keine Bewertungen
- Line Follower Robot Using ArduinoDokument13 SeitenLine Follower Robot Using Arduinolizhi2012Noch keine Bewertungen
- The Servant LeadershipDokument7 SeitenThe Servant Leadershipnavkar_centreforskills100% (1)
- Hand Gesture Controlled RobotDokument59 SeitenHand Gesture Controlled RobotNiharikaNoch keine Bewertungen
- Interfacing Arduino With Keypad, DC Motor-1Dokument11 SeitenInterfacing Arduino With Keypad, DC Motor-1Ankush KumarNoch keine Bewertungen
- By Connecting An L298 Bridge IC To An Arduino, You Can Control A DC MotorDokument9 SeitenBy Connecting An L298 Bridge IC To An Arduino, You Can Control A DC MotorParul RathvaNoch keine Bewertungen
- Arduino Based Fire Fighting Robot ProjectDokument13 SeitenArduino Based Fire Fighting Robot ProjectAnant TiwariNoch keine Bewertungen
- Industrial Electronics & Robotics: Lab WorkDokument8 SeitenIndustrial Electronics & Robotics: Lab WorkIam QaXimNoch keine Bewertungen
- Ks0159 Keyestudio Desktop Bluetooth Mini Smart CarDokument26 SeitenKs0159 Keyestudio Desktop Bluetooth Mini Smart CarpotroloinNoch keine Bewertungen
- Muhammad Ubaidillah - Tugas 5 - RobotikaDokument15 SeitenMuhammad Ubaidillah - Tugas 5 - Robotikamhmmd ubdllhNoch keine Bewertungen
- How To Control A DC Motor With An ArduinoDokument7 SeitenHow To Control A DC Motor With An Arduinothatchaphan norkhamNoch keine Bewertungen
- Line Follower Robot Using Arduino and L298N ModuleDokument9 SeitenLine Follower Robot Using Arduino and L298N ModuleBizuneh getuNoch keine Bewertungen
- Edge Detector and Avoider RobotDokument7 SeitenEdge Detector and Avoider RobotharrysinghNoch keine Bewertungen
- Function and SyntexDokument8 SeitenFunction and SyntexSifatNoch keine Bewertungen
- Iot Module 2 MaterialDokument36 SeitenIot Module 2 Materialteswart2002Noch keine Bewertungen
- Automated Line FollowingDokument8 SeitenAutomated Line FollowingManoj KumarNoch keine Bewertungen
- Obstacle Avoiding RobotDokument18 SeitenObstacle Avoiding RobotAJIN KNoch keine Bewertungen
- Line Follower RobotDokument22 SeitenLine Follower Robotkawish4uNoch keine Bewertungen
- Obstacle Avoiding RobotDokument17 SeitenObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- Using Arduino and Coding: Automatic Bidirectional Visitor CounterDokument5 SeitenUsing Arduino and Coding: Automatic Bidirectional Visitor CounterInayat UllahNoch keine Bewertungen
- Line Following Robot Using Arduino: Pavan Kumar 14311A04E4Dokument11 SeitenLine Following Robot Using Arduino: Pavan Kumar 14311A04E4surverajeNoch keine Bewertungen
- Working Principle: 1) System CheckDokument8 SeitenWorking Principle: 1) System CheckHans IngoleNoch keine Bewertungen
- Control A DC Motor With An ArduinoDokument5 SeitenControl A DC Motor With An Arduinolizhi0007Noch keine Bewertungen
- Final Report On Line Follower RobotDokument44 SeitenFinal Report On Line Follower RobotAjay Verma50% (4)
- Remote Controlled Robot Using ArduinoDokument5 SeitenRemote Controlled Robot Using ArduinodanielNoch keine Bewertungen
- Four Way Tracking Car TutorialDokument26 SeitenFour Way Tracking Car Tutorialvadym_kovalenko4166Noch keine Bewertungen
- Arduino Project Report IR CarDokument9 SeitenArduino Project Report IR Carmohammad shoaibNoch keine Bewertungen
- Round Two GuideDokument13 SeitenRound Two GuideSarmad AhmadNoch keine Bewertungen
- Line Follower Robot Using 8051 Micro ControllerDokument34 SeitenLine Follower Robot Using 8051 Micro Controllerm.abdullah100% (2)
- Arduino Tutorial "Communication"Dokument4 SeitenArduino Tutorial "Communication"alinupNoch keine Bewertungen
- Obstacle Detection Ultrasonic Sensor ProgramDokument7 SeitenObstacle Detection Ultrasonic Sensor Programtheanandsingh76Noch keine Bewertungen
- Intro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationDokument33 SeitenIntro To The Arduino: Topics: The Arduino Digital IO Analog IO Serial CommunicationPrince GoenkaNoch keine Bewertungen
- 1253 Iot PRG 1 2 3Dokument7 Seiten1253 Iot PRG 1 2 3xyz abcNoch keine Bewertungen
- Obstacle Detecting Line Follower RobotDokument19 SeitenObstacle Detecting Line Follower RobotBibek Sau80% (5)
- Obstacle Avoiding RobotDokument17 SeitenObstacle Avoiding Robotukavnganesh2002Noch keine Bewertungen
- Final Report - EHDcodeDokument13 SeitenFinal Report - EHDcodeShreya AgrawalNoch keine Bewertungen
- EXP2Dokument5 SeitenEXP2Sri ChandanaNoch keine Bewertungen
- Design and Implementation of Line Follower Robot Using Arduino MicrocontrollerDokument26 SeitenDesign and Implementation of Line Follower Robot Using Arduino MicrocontrollernagarajanNoch keine Bewertungen
- Heartbeat CounterDokument7 SeitenHeartbeat CounterJalal JolanNoch keine Bewertungen
- Arduino PresentationDokument43 SeitenArduino PresentationraamNoch keine Bewertungen
- Smart Bus: Seat CounterDokument6 SeitenSmart Bus: Seat Counterarunv692Noch keine Bewertungen
- #1 Blink An LEDDokument23 Seiten#1 Blink An LEDclaire cabatoNoch keine Bewertungen
- Bluetooth Controlled RobotDokument7 SeitenBluetooth Controlled RobotjnaguNoch keine Bewertungen
- Elec 562Dokument6 SeitenElec 562MOHAMMEDNoch keine Bewertungen
- Esp32 For Iot ApplicationsDokument35 SeitenEsp32 For Iot ApplicationsDivyesh DehuryNoch keine Bewertungen
- 4 AMM - Unit 4 Arduino Interfacing - 18 April 2022 - WatermarkDokument32 Seiten4 AMM - Unit 4 Arduino Interfacing - 18 April 2022 - Watermarkpatilamrutak2003Noch keine Bewertungen
- DC Motor Angle ControlDokument5 SeitenDC Motor Angle ControlaprilNoch keine Bewertungen
- Line Follower Without Using Micro ControllerDokument3 SeitenLine Follower Without Using Micro Controllerp_surya1994Noch keine Bewertungen
- Aurdino Based Waste Segregator - VIIDokument2 SeitenAurdino Based Waste Segregator - VIIVimalNoch keine Bewertungen
- G-1-1-A1 - Tugas Ke-1Dokument1 SeiteG-1-1-A1 - Tugas Ke-1Agung SetyonoNoch keine Bewertungen
- PressedDokument32 SeitenPressedAgung SetyonoNoch keine Bewertungen
- Pemrograman Mikroprosesor Zilog-80 Dengan Menggunakan Z-80 SimulatorDokument10 SeitenPemrograman Mikroprosesor Zilog-80 Dengan Menggunakan Z-80 SimulatorAgung SetyonoNoch keine Bewertungen
- RoboticaDokument57 SeitenRoboticaHéctor LchNoch keine Bewertungen
- Home ControlDokument25 SeitenHome ControlAgung SetyonoNoch keine Bewertungen
- Robot or Not?: Emily Stone, Katie Dardis, Rachael Rzepka, Courtney AriolaDokument13 SeitenRobot or Not?: Emily Stone, Katie Dardis, Rachael Rzepka, Courtney AriolaAgung SetyonoNoch keine Bewertungen
- Is Now Part ofDokument9 SeitenIs Now Part ofAgung SetyonoNoch keine Bewertungen
- Pemilihan Desain Prosthetic Jari Tangan Berdasarkan Mekanisme Sistem Penggerak Cross Bar Dan Cross Cable Terhadap Besar Gaya Tarik Dinamis Prosthetic Jari TanganDokument8 SeitenPemilihan Desain Prosthetic Jari Tangan Berdasarkan Mekanisme Sistem Penggerak Cross Bar Dan Cross Cable Terhadap Besar Gaya Tarik Dinamis Prosthetic Jari TanganAgung SetyonoNoch keine Bewertungen
- Diagram Alir PidDokument1 SeiteDiagram Alir PidAgung SetyonoNoch keine Bewertungen
- Diagram Alir PidDokument1 SeiteDiagram Alir PidAgung SetyonoNoch keine Bewertungen
- Diagram Alir PidDokument1 SeiteDiagram Alir PidAgung SetyonoNoch keine Bewertungen
- Borg 2002Dokument16 SeitenBorg 2002Victor Daniel WaasNoch keine Bewertungen
- Program Package For First Arrival Seismic TomographyDokument17 SeitenProgram Package For First Arrival Seismic TomographypraveenNoch keine Bewertungen
- Lec Verilog TrafficLight SynthesisDokument32 SeitenLec Verilog TrafficLight SynthesisKartikey ManchandaNoch keine Bewertungen
- Art Funding EssayDokument2 SeitenArt Funding EssayDương NguyễnNoch keine Bewertungen
- Dukungan Suami Terhadap Pemberian Asi Eksklusif PaDokument11 SeitenDukungan Suami Terhadap Pemberian Asi Eksklusif PayolandaNoch keine Bewertungen
- CP R80.20 GA ReleaseNotesDokument30 SeitenCP R80.20 GA ReleaseNotesgarytj21Noch keine Bewertungen
- 3 s2.0 B9780123745187000237 MainDokument2 Seiten3 s2.0 B9780123745187000237 MainOana PanaitNoch keine Bewertungen
- Netfinity Tape Solutions Sg245218Dokument318 SeitenNetfinity Tape Solutions Sg245218bupbechanhNoch keine Bewertungen
- DLP in English 5Dokument8 SeitenDLP in English 5Jervyn GuiananNoch keine Bewertungen
- Advances Chemical Engineering PDFDokument248 SeitenAdvances Chemical Engineering PDFDaiane SantanaNoch keine Bewertungen
- Free W3 Blog TemplateDokument4 SeitenFree W3 Blog TemplateMaseko CharuzuNoch keine Bewertungen
- Raj Yoga ReportDokument17 SeitenRaj Yoga ReportSweaty Sunny50% (2)
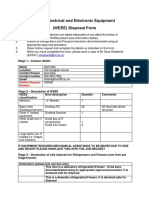
- Waste Electrical and Electronic Equipment (WEEE) Disposal FormDokument2 SeitenWaste Electrical and Electronic Equipment (WEEE) Disposal FormJake HurleyNoch keine Bewertungen
- C++ Functions: Defining A FunctionDokument4 SeitenC++ Functions: Defining A FunctionSourav RoyNoch keine Bewertungen
- Analysis of Portal Frame Structure With ETABS PDFDokument19 SeitenAnalysis of Portal Frame Structure With ETABS PDFAnonymous OynOOfNoch keine Bewertungen
- Orientation, Training and Development, and Career Planning: Chapter ObjectivesDokument17 SeitenOrientation, Training and Development, and Career Planning: Chapter ObjectiveslinhNoch keine Bewertungen
- Optimization Module For Abaqus/CAE Based On Genetic AlgorithmDokument1 SeiteOptimization Module For Abaqus/CAE Based On Genetic AlgorithmSIMULIACorpNoch keine Bewertungen
- Speaking B2Dokument2 SeitenSpeaking B2Strafalogea SerbanNoch keine Bewertungen
- Maclaurin 14Dokument3 SeitenMaclaurin 14ichkhuyNoch keine Bewertungen
- Word Formation ProcessesDokument27 SeitenWord Formation ProcessesMichael GonzagaNoch keine Bewertungen
- Chapter Test A: Teacher Notes and Answers Vibrations and WavesDokument5 SeitenChapter Test A: Teacher Notes and Answers Vibrations and WavesMuhammadNoch keine Bewertungen
- Introducing Sustainable Development IntroductionDokument4 SeitenIntroducing Sustainable Development IntroductionEureka KingNoch keine Bewertungen
- Chapter 3 Physical Resources PDFDokument15 SeitenChapter 3 Physical Resources PDFfloNoch keine Bewertungen
- The Use of Electrical Resistivity Tomography (ERT) To Delineate W PDFDokument76 SeitenThe Use of Electrical Resistivity Tomography (ERT) To Delineate W PDFConstantin UngureanuNoch keine Bewertungen
- Virtuoso TutorialDokument14 SeitenVirtuoso TutorialSrikanth Govindarajan0% (1)