Das könnte Ihnen auch gefallen
- Grit: The Power of Passion and PerseveranceVon EverandGrit: The Power of Passion and PerseveranceBewertung: 4 von 5 Sternen4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Von EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Bewertung: 4 von 5 Sternen4/5 (98)
- A320i A420i A520i Product Manual Touchscreen Variant English EPT006508 2Dokument249 SeitenA320i A420i A520i Product Manual Touchscreen Variant English EPT006508 2Nikola Perencevic100% (3)
- MyDomino - EN - ManualsPortal - ScribingLaser - D Series Itech - English - D120i D320i D620i Software Menu Map EnglishDokument4 SeitenMyDomino - EN - ManualsPortal - ScribingLaser - D Series Itech - English - D120i D320i D620i Software Menu Map EnglishNikola PerencevicNoch keine Bewertungen
- Data Sheet 6ES7214-1HG40-0XB0: General InformationDokument10 SeitenData Sheet 6ES7214-1HG40-0XB0: General InformationNikola PerencevicNoch keine Bewertungen
- MyDomino - EN - ManualsPortal - ScribingLaser - D Series Itech - English - D120i D320i D620i Pharma User Guide English L027971 4Dokument14 SeitenMyDomino - EN - ManualsPortal - ScribingLaser - D Series Itech - English - D120i D320i D620i Pharma User Guide English L027971 4Nikola PerencevicNoch keine Bewertungen
- Data Sheet 6ES7331-1KF02-0AB0: Input CurrentDokument5 SeitenData Sheet 6ES7331-1KF02-0AB0: Input CurrentNikola PerencevicNoch keine Bewertungen
- Pic 32 CanDokument100 SeitenPic 32 CanNikola PerencevicNoch keine Bewertungen
- The Hafner Pneumatic Training CourseDokument110 SeitenThe Hafner Pneumatic Training CourseNikola PerencevicNoch keine Bewertungen
- Fluke125 PDFDokument7 SeitenFluke125 PDFNikola PerencevicNoch keine Bewertungen
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeVon EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeBewertung: 4 von 5 Sternen4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItVon EverandNever Split the Difference: Negotiating As If Your Life Depended On ItBewertung: 4.5 von 5 Sternen4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceVon EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceBewertung: 4 von 5 Sternen4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersVon EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersBewertung: 4.5 von 5 Sternen4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeVon EverandShoe Dog: A Memoir by the Creator of NikeBewertung: 4.5 von 5 Sternen4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingVon EverandThe Little Book of Hygge: Danish Secrets to Happy LivingBewertung: 3.5 von 5 Sternen3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureVon EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureBewertung: 4.5 von 5 Sternen4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryVon EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryBewertung: 3.5 von 5 Sternen3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealVon EverandOn Fire: The (Burning) Case for a Green New DealBewertung: 4 von 5 Sternen4/5 (74)
- The Emperor of All Maladies: A Biography of CancerVon EverandThe Emperor of All Maladies: A Biography of CancerBewertung: 4.5 von 5 Sternen4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaVon EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaBewertung: 4.5 von 5 Sternen4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaVon EverandThe Unwinding: An Inner History of the New AmericaBewertung: 4 von 5 Sternen4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnVon EverandTeam of Rivals: The Political Genius of Abraham LincolnBewertung: 4.5 von 5 Sternen4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyVon EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyBewertung: 3.5 von 5 Sternen3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreVon EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreBewertung: 4 von 5 Sternen4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Von EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Bewertung: 4.5 von 5 Sternen4.5/5 (121)
- Her Body and Other Parties: StoriesVon EverandHer Body and Other Parties: StoriesBewertung: 4 von 5 Sternen4/5 (821)
- AD Merkblatt 2000 CodeDokument4 SeitenAD Merkblatt 2000 CodeoscartttNoch keine Bewertungen
- Pinhole Camera InformationDokument4 SeitenPinhole Camera InformationD'ferti AnggraeniNoch keine Bewertungen
- Mohana Krishnan KsDokument2 SeitenMohana Krishnan KsKanna MonishNoch keine Bewertungen
- Quadcopter Design DocumentDokument23 SeitenQuadcopter Design Documentapi-556772195Noch keine Bewertungen
- Gold Kacha Flyer 2012Dokument2 SeitenGold Kacha Flyer 2012gustavus1Noch keine Bewertungen
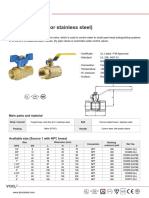
- VC02 Brass Ball Valve Full Port Full BoreDokument2 SeitenVC02 Brass Ball Valve Full Port Full Boremahadeva1Noch keine Bewertungen
- Unity For Mobile Games: Solution GuideDokument9 SeitenUnity For Mobile Games: Solution GuideAlexaNoch keine Bewertungen
- Atos QV06Dokument2 SeitenAtos QV06BillouNoch keine Bewertungen
- Specialty Lubricants Molykote®: 44MA GreaseDokument2 SeitenSpecialty Lubricants Molykote®: 44MA GreasefadhlidzilNoch keine Bewertungen
- Fisher Imprints: Inter-Disciplinary PressDokument8 SeitenFisher Imprints: Inter-Disciplinary PressUndi GunawanNoch keine Bewertungen
- Fire Alarm Sys Nec 760Dokument10 SeitenFire Alarm Sys Nec 760nadeem Uddin100% (1)
- Corning SMF-28 DatasheetDokument2 SeitenCorning SMF-28 DatasheetsusyheunaNoch keine Bewertungen
- IRDADokument26 SeitenIRDANikhil JainNoch keine Bewertungen
- أثر جودة الخدمة المصرفية الإلكترونية في تقوية العلاقة بين المصرف والزبائن - رمزي طلال حسن الردايدة PDFDokument146 Seitenأثر جودة الخدمة المصرفية الإلكترونية في تقوية العلاقة بين المصرف والزبائن - رمزي طلال حسن الردايدة PDFNezo Qawasmeh100% (1)
- Justeq07 Product BulletinDokument1 SeiteJusteq07 Product BulletinjusteqNoch keine Bewertungen
- ChE 132 - Oct 17Dokument49 SeitenChE 132 - Oct 17datUPstudentdoe0% (2)
- Be It Enacted by The Senate and House of Representative of The Philippines in Congress AssembledDokument36 SeitenBe It Enacted by The Senate and House of Representative of The Philippines in Congress AssembledGina Portuguese GawonNoch keine Bewertungen
- 01 IK IESYS e Communications OverviewDokument12 Seiten01 IK IESYS e Communications OverviewHernando AlborNoch keine Bewertungen
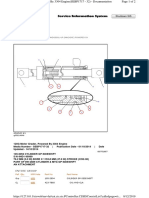
- Shutdown SIS: Motor Grader 120G Motor Grader 4Hd 120G Motor Grader 4HD00001-UP (MACHINE) POWERED BY 3304 EngineDokument2 SeitenShutdown SIS: Motor Grader 120G Motor Grader 4Hd 120G Motor Grader 4HD00001-UP (MACHINE) POWERED BY 3304 EngineStevenNoch keine Bewertungen
- Airtag Wallet Keyword Search-2Dokument15 SeitenAirtag Wallet Keyword Search-2Azhar ShakeelNoch keine Bewertungen
- Helios Uk ElsDokument22 SeitenHelios Uk ElssanitermNoch keine Bewertungen
- Why JSON in PostgreSQL Is AwesomeDokument7 SeitenWhy JSON in PostgreSQL Is AwesomeTeo TokisNoch keine Bewertungen
- Jill K. Hatanaka: San Joaquin County Office of Education 2707 Transworld Drive Stockton, CA 95206 209-401-2406Dokument3 SeitenJill K. Hatanaka: San Joaquin County Office of Education 2707 Transworld Drive Stockton, CA 95206 209-401-2406api-114772135Noch keine Bewertungen
- Mercruiser GearcasecomponentsDokument42 SeitenMercruiser GearcasecomponentswguenonNoch keine Bewertungen
- Curriculum Vitae - MICHAEL PDFDokument1 SeiteCurriculum Vitae - MICHAEL PDFMichael Christian CamasuraNoch keine Bewertungen
- Backup Exec 12.5 AVVIDokument6 SeitenBackup Exec 12.5 AVVIcharanjit_singhNoch keine Bewertungen
- Reverse LogisticsDokument18 SeitenReverse Logisticsiazeem2401630Noch keine Bewertungen
- 5 Easy Tips On How To Get Canadian Experience: Job SearchDokument15 Seiten5 Easy Tips On How To Get Canadian Experience: Job Searchranvirsingh76Noch keine Bewertungen
- Overhall Diferencial Mack PDFDokument150 SeitenOverhall Diferencial Mack PDFmanuel fernandezNoch keine Bewertungen
- Powershell Simple and Effective Strategies To Execute Powershell Programming - Daniel JonesDokument53 SeitenPowershell Simple and Effective Strategies To Execute Powershell Programming - Daniel JonesdemisitoNoch keine Bewertungen