Das könnte Ihnen auch gefallen
- Practical Process Control for Engineers and TechniciansVon EverandPractical Process Control for Engineers and TechniciansBewertung: 5 von 5 Sternen5/5 (3)
- DENSO - Robotics - VS-G Model Installation and Maintenance GuideDokument104 SeitenDENSO - Robotics - VS-G Model Installation and Maintenance Guideto0984903132Noch keine Bewertungen
- CNC Machining Handbook: Building, Programming, and ImplementationVon EverandCNC Machining Handbook: Building, Programming, and ImplementationNoch keine Bewertungen
- DENSO - Robotics - VS-050.060.068.187 (VS Model) Introduction GuideLoDokument129 SeitenDENSO - Robotics - VS-050.060.068.187 (VS Model) Introduction GuideLoQuyen LuongNoch keine Bewertungen
- Robot: Installation & Maintenance GuideDokument54 SeitenRobot: Installation & Maintenance GuidedimaNoch keine Bewertungen
- 3HAC070393 PS IRB 1300-EnDokument82 Seiten3HAC070393 PS IRB 1300-EnANANoch keine Bewertungen
- Product Specification IRB 4600Dokument70 SeitenProduct Specification IRB 4600Raul Elric AlbaranNoch keine Bewertungen
- 3HAC035960 PS IRB 120-EnDokument50 Seiten3HAC035960 PS IRB 120-EnLeandro MayrataNoch keine Bewertungen
- Manual ABB2400 161.55Dokument50 SeitenManual ABB2400 161.55palino9999Noch keine Bewertungen
- 3HAC023932 PS IRB 660-EnDokument64 Seiten3HAC023932 PS IRB 660-EnOtero Gabriel (Carlinhos)Noch keine Bewertungen
- 3HAC064993 PS IRB 1100-EnDokument94 Seiten3HAC064993 PS IRB 1100-Enqq1175988837Noch keine Bewertungen
- Autonics Daqmaster ManualDokument210 SeitenAutonics Daqmaster ManualkariemNoch keine Bewertungen
- 3HAC039611 PS IRB 460 on IRC5-enDokument56 Seiten3HAC039611 PS IRB 460 on IRC5-enBruno Alberto de SouzaNoch keine Bewertungen
- ER120 Mechanical Maintenance ManualDokument53 SeitenER120 Mechanical Maintenance Manualforce ramdomNoch keine Bewertungen
- 6600 AbbDokument80 Seiten6600 AbbANDRENoch keine Bewertungen
- Product Specification: Articulated RobotDokument48 SeitenProduct Specification: Articulated RobotFrancisco CalderónNoch keine Bewertungen
- Tcfen-154-001 CFD Startup PDFDokument88 SeitenTcfen-154-001 CFD Startup PDFPhasin Chitutsaha100% (1)
- E ForceGuide70 r14Dokument834 SeitenE ForceGuide70 r14Omar BarrazaNoch keine Bewertungen
- Safety HandbookDokument36 SeitenSafety HandbookCharles JacobNoch keine Bewertungen
- E EPSONRC+UsersGuide75 r1Dokument606 SeitenE EPSONRC+UsersGuide75 r1IOZEF1Noch keine Bewertungen
- 3hac046982 Ps Irb 1200 On Irc5-EnDokument72 Seiten3hac046982 Ps Irb 1200 On Irc5-EnnvknhatNoch keine Bewertungen
- 3hac068057 001Dokument58 Seiten3hac068057 001Arturo NavarroNoch keine Bewertungen
- DocumentatieRoboti IRB360Dokument54 SeitenDocumentatieRoboti IRB360Buta IonutNoch keine Bewertungen
- Irb 660 180 3.15Dokument54 SeitenIrb 660 180 3.15laurentiuflorentin2019Noch keine Bewertungen
- Robot Manual R7 R7.2-2Dokument262 SeitenRobot Manual R7 R7.2-2Bryan alexisNoch keine Bewertungen
- 3hac035959 Ps Irb 2600 On Irc5-EnDokument96 Seiten3hac035959 Ps Irb 2600 On Irc5-EnNguyễn HậuNoch keine Bewertungen
- 3HAC046983 PM IRB 1200-EnDokument916 Seiten3HAC046983 PM IRB 1200-EnRafael Flores HNoch keine Bewertungen
- Product Manual: RoboticsDokument906 SeitenProduct Manual: RoboticsAnhhNoch keine Bewertungen
- Omron Sysmac C200he-Cpu42Dokument259 SeitenOmron Sysmac C200he-Cpu42cuervocrowNoch keine Bewertungen
- REGIUS 110HQ Service Manual - 0404IA01EN02 PDFDokument288 SeitenREGIUS 110HQ Service Manual - 0404IA01EN02 PDFMathieu RazafimamonjyNoch keine Bewertungen
- Manual de Programacion at Logic-InglesDokument417 SeitenManual de Programacion at Logic-InglesLuis AngelNoch keine Bewertungen
- Advc N-Series InstallationDokument77 SeitenAdvc N-Series InstallationFadly Fachrul RozyNoch keine Bewertungen
- Safety Manual (B-80687EN 07)Dokument32 SeitenSafety Manual (B-80687EN 07)retox9000Noch keine Bewertungen
- CQM1 Operation ManualDokument155 SeitenCQM1 Operation ManualMauricio LunaNoch keine Bewertungen
- DocumentatieRoboti IRB120Dokument48 SeitenDocumentatieRoboti IRB120Buta IonutNoch keine Bewertungen
- GSK Servo Driver GS2000 Manual de UsuarioDokument134 SeitenGSK Servo Driver GS2000 Manual de UsuarioGustavo Gonzalez ToledoNoch keine Bewertungen
- Programmable Controllers: SysmacDokument158 SeitenProgrammable Controllers: Sysmacdudas76Noch keine Bewertungen
- 3HAC043437 PS IRB 1520-En PDFDokument54 Seiten3HAC043437 PS IRB 1520-En PDFSreema AruviNoch keine Bewertungen
- 3HAC081954 PS IRB 460 on OmniCore-enDokument50 Seiten3HAC081954 PS IRB 460 on OmniCore-enBruno Alberto de SouzaNoch keine Bewertungen
- 3hac050974 Am Safemove1 RW 6-EnDokument230 Seiten3hac050974 Am Safemove1 RW 6-EncheloooxxxNoch keine Bewertungen
- Operating Instructions: XV-102 Micro PanelDokument78 SeitenOperating Instructions: XV-102 Micro PanelEdison MalacaraNoch keine Bewertungen
- 3HAC056431 PS IRB 910SC-en PDFDokument56 Seiten3HAC056431 PS IRB 910SC-en PDFjuam david ramirezNoch keine Bewertungen
- 3HAC050974 AM SafeMove1 RW 6-En PDFDokument230 Seiten3HAC050974 AM SafeMove1 RW 6-En PDFSandu RaduNoch keine Bewertungen
- 3hac068055 001Dokument844 Seiten3hac068055 001Arturo NavarroNoch keine Bewertungen
- Operating Manual Parts List: 660/850VMC (FANUC 0iMD)Dokument276 SeitenOperating Manual Parts List: 660/850VMC (FANUC 0iMD)apodshNoch keine Bewertungen
- 3HAC023113 AM ABB IRC5 OPC Server HelpDokument62 Seiten3HAC023113 AM ABB IRC5 OPC Server HelpGerardoNoch keine Bewertungen
- Advant MotValvDokument156 SeitenAdvant MotValvPetre100% (1)
- 3HAC028284 PS IRB 6640-EnDokument148 Seiten3HAC028284 PS IRB 6640-EnEmrecan ÇerliNoch keine Bewertungen
- 3HAC025755 PM IRB 660-EnDokument364 Seiten3HAC025755 PM IRB 660-EnArnaldo OliveiraNoch keine Bewertungen
- Electronic Position Switches: Application ManualDokument84 SeitenElectronic Position Switches: Application Manualfjpires_7012Noch keine Bewertungen
- 3HAC022031 PM IRB 2400-En PDFDokument242 Seiten3HAC022031 PM IRB 2400-En PDFSorin VinagaNoch keine Bewertungen
- 3BDS021515-510 - A - en - AC 800M - 5.1 - PROFINET - I - O - ConfigurationDokument142 Seiten3BDS021515-510 - A - en - AC 800M - 5.1 - PROFINET - I - O - ConfigurationrichardNoch keine Bewertungen
- IRB 4600-EnDokument398 SeitenIRB 4600-EnLardyNoch keine Bewertungen
- E EPSONRC+UsersGuide54 r7Dokument318 SeitenE EPSONRC+UsersGuide54 r7MARTIN LOPEZNoch keine Bewertungen
- Omnicore c90xtDokument450 SeitenOmnicore c90xtBryan CamargoNoch keine Bewertungen
- Application Manual: Production MonitorDokument56 SeitenApplication Manual: Production MonitorGrahamNoch keine Bewertungen
- 3HAC044266 PM IRB 6700-EnDokument864 Seiten3HAC044266 PM IRB 6700-Enfacebook securityNoch keine Bewertungen
- 3bse021377r5011 Cio RNDokument196 Seiten3bse021377r5011 Cio RNMohamed AbdelkaderNoch keine Bewertungen
- W167 E1 04A+CxxP+Installation GuideDokument95 SeitenW167 E1 04A+CxxP+Installation GuideAdrian GarciaNoch keine Bewertungen
- Academic Calender Pascasiswazah - 202103Dokument1 SeiteAcademic Calender Pascasiswazah - 202103phyrdowsNoch keine Bewertungen
- Nestle - PKK 1 PDFDokument2 SeitenNestle - PKK 1 PDFphyrdowsNoch keine Bewertungen
- Basic PLCDokument77 SeitenBasic PLCFirdaus Ali50% (2)
- DJJ 2022Dokument8 SeitenDJJ 2022phyrdowsNoch keine Bewertungen
- Read MeDokument1 SeiteRead MeLuccas CastoriniNoch keine Bewertungen
- Policy Bike enDokument16 SeitenPolicy Bike enphyrdowsNoch keine Bewertungen
- TextDokument1 SeiteTextphyrdowsNoch keine Bewertungen
- Sifir AqraAliffDokument1 SeiteSifir AqraAliffphyrdowsNoch keine Bewertungen
- Downloaded FromDokument2 SeitenDownloaded FromDuzzysNoch keine Bewertungen
- 4.0 Shaft, Axle & BearingDokument75 Seiten4.0 Shaft, Axle & BearingphyrdowsNoch keine Bewertungen
- Jy997d16601q PDFDokument966 SeitenJy997d16601q PDFThiênBảoNoch keine Bewertungen
- BT-T&C - Eng-22112017Dokument3 SeitenBT-T&C - Eng-22112017phyrdowsNoch keine Bewertungen
- Order by Mail: Enquiries:: Redemption FormDokument1 SeiteOrder by Mail: Enquiries:: Redemption FormThomas TuckerNoch keine Bewertungen
- Format Penulisan Kertas KerjaDokument4 SeitenFormat Penulisan Kertas KerjaphyrdowsNoch keine Bewertungen
- Week 4Dokument18 SeitenWeek 4phyrdowsNoch keine Bewertungen
- Week 1Dokument17 SeitenWeek 1phyrdowsNoch keine Bewertungen
- DJM2032 - Electronic SystemDokument19 SeitenDJM2032 - Electronic SystemphyrdowsNoch keine Bewertungen
- Week 2Dokument18 SeitenWeek 2phyrdowsNoch keine Bewertungen
- Application Form JICADokument8 SeitenApplication Form JICAphyrdowsNoch keine Bewertungen
- Chapter 1Dokument20 SeitenChapter 1phyrdowsNoch keine Bewertungen
- Jadual MPI - Sem II 20132014 - 2Dokument2 SeitenJadual MPI - Sem II 20132014 - 2phyrdowsNoch keine Bewertungen
- PIPPO - ElectronicsDokument2 SeitenPIPPO - ElectronicsphyrdowsNoch keine Bewertungen
- Jadual MPI - Sem II 20132014 - 2Dokument2 SeitenJadual MPI - Sem II 20132014 - 2phyrdowsNoch keine Bewertungen
- Add Chapter 3Dokument3 SeitenAdd Chapter 3phyrdowsNoch keine Bewertungen
- Double Pipe Analysis Using AnsysDokument15 SeitenDouble Pipe Analysis Using Ansysramkumar121Noch keine Bewertungen
- Tutorial For Ansys Fluent Porous MediaDokument30 SeitenTutorial For Ansys Fluent Porous MediaLykaios Schultz DohrnNoch keine Bewertungen
- Jadual MPI - Sem II 20132014Dokument3 SeitenJadual MPI - Sem II 20132014phyrdowsNoch keine Bewertungen
- Assignment o Tom at I OnDokument22 SeitenAssignment o Tom at I OnphyrdowsNoch keine Bewertungen
- Assignment DR TeeDokument46 SeitenAssignment DR TeephyrdowsNoch keine Bewertungen
- Lateral LoadDokument1 SeiteLateral LoaderodedNoch keine Bewertungen
- Chocolate RheologyDokument7 SeitenChocolate RheologyAdil AnwarNoch keine Bewertungen
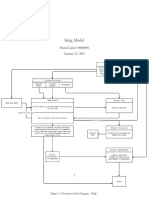
- Ising ModelDokument5 SeitenIsing Modeldecerto252Noch keine Bewertungen
- Normal Distribution Giuded SolutionsDokument5 SeitenNormal Distribution Giuded SolutionsleeshanghaoNoch keine Bewertungen
- Osborne Reynolds Experiment Flow RegimesDokument6 SeitenOsborne Reynolds Experiment Flow RegimesJayasanka33% (3)
- A Kinetic Study of The Reduction of Colloidal Manganese Dioxide by Oxalic AcidDokument10 SeitenA Kinetic Study of The Reduction of Colloidal Manganese Dioxide by Oxalic AcidDarine Mahfouf Ep BoucharebNoch keine Bewertungen
- CE272 Fluid MechanicsDokument56 SeitenCE272 Fluid MechanicsHasan KırmızıoğlanNoch keine Bewertungen
- Molecular Partition Function ExplainedDokument18 SeitenMolecular Partition Function ExplainedAnimasahun Olamide HammedNoch keine Bewertungen
- Static Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALDokument8 SeitenStatic Studies of Magneto-Electro-Elastic 3-D Beam Using ANSYS - FINALjssrikantamurthyNoch keine Bewertungen
- Clarke and Park TransfomationDokument9 SeitenClarke and Park TransfomationGREATJUSTGREATNoch keine Bewertungen
- Numerical Solution of Seepage Problem of Groundwater FlowDokument5 SeitenNumerical Solution of Seepage Problem of Groundwater FlowIOSRjournalNoch keine Bewertungen
- History of Buckling of ColumnDokument10 SeitenHistory of Buckling of ColumnSorin Viorel CrainicNoch keine Bewertungen
- Chapter 3 Linear KinematicsDokument26 SeitenChapter 3 Linear KinematicsKuldeep SinghNoch keine Bewertungen
- Mock C4 Paper Key ConceptsDokument4 SeitenMock C4 Paper Key ConceptsWojtek BażantNoch keine Bewertungen
- Carrfoster 2Dokument5 SeitenCarrfoster 2SauravNoch keine Bewertungen
- Xxii Paper 51Dokument9 SeitenXxii Paper 51kjyeom_258083906Noch keine Bewertungen
- Pseudocode for determining minimum launch angle to clear an obstacleDokument8 SeitenPseudocode for determining minimum launch angle to clear an obstacleChristian BatayenNoch keine Bewertungen
- History of Contingency Theory: Reporter: Emiliana J. LozanoDokument23 SeitenHistory of Contingency Theory: Reporter: Emiliana J. Lozanoaireenclores100% (3)
- Ezy Math Tutoring - Year 9 AnswersDokument144 SeitenEzy Math Tutoring - Year 9 AnswersVincents Genesius EvansNoch keine Bewertungen
- A Study of The Effect of Blasting Vibration On Green ConcreteDokument160 SeitenA Study of The Effect of Blasting Vibration On Green ConcreteNattHemat HulinNoch keine Bewertungen
- Chapter 1 Lecture1Dokument39 SeitenChapter 1 Lecture1Anonymous AFFiZnNoch keine Bewertungen
- POMFriction AssessmentDokument11 SeitenPOMFriction AssessmentJoãoAraújoNoch keine Bewertungen
- Design of 10m Span RCC Slab CulvertDokument105 SeitenDesign of 10m Span RCC Slab CulvertD.V.Srinivasa Rao100% (4)
- Refrigerant R22 Properties TableDokument4 SeitenRefrigerant R22 Properties TableKiki Indra HNoch keine Bewertungen
- Expt 01Dokument10 SeitenExpt 01Kathleen De Vera BarrilNoch keine Bewertungen
- Simulation of Soil Compaction With Vibratory Rollers PDFDokument13 SeitenSimulation of Soil Compaction With Vibratory Rollers PDFSandeep KumarNoch keine Bewertungen
- Archimedes Heat RayDokument5 SeitenArchimedes Heat RayElliah Jen BiluganNoch keine Bewertungen
- SosthenesDokument396 SeitenSosthenesAthiesh KumarNoch keine Bewertungen
- P Ractical Approaches To Fast Gas Chromatography-Mass Spectrometry Muy BuenoDokument28 SeitenP Ractical Approaches To Fast Gas Chromatography-Mass Spectrometry Muy BuenoJavier Joao Lloyd IglesiasNoch keine Bewertungen
- 16.323 Principles of Optimal Control: Mit OpencoursewareDokument26 Seiten16.323 Principles of Optimal Control: Mit Opencoursewaremousa bagherpourjahromiNoch keine Bewertungen
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityVon EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityBewertung: 5 von 5 Sternen5/5 (1)
- Dealers of Lightning: Xerox PARC and the Dawn of the Computer AgeVon EverandDealers of Lightning: Xerox PARC and the Dawn of the Computer AgeBewertung: 4 von 5 Sternen4/5 (88)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldVon EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (54)
- Algorithms to Live By: The Computer Science of Human DecisionsVon EverandAlgorithms to Live By: The Computer Science of Human DecisionsBewertung: 4.5 von 5 Sternen4.5/5 (722)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveVon EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNoch keine Bewertungen
- Digital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyVon EverandDigital Gold: Bitcoin and the Inside Story of the Misfits and Millionaires Trying to Reinvent MoneyBewertung: 4 von 5 Sternen4/5 (51)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessVon EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNoch keine Bewertungen
- Generative AI: The Insights You Need from Harvard Business ReviewVon EverandGenerative AI: The Insights You Need from Harvard Business ReviewBewertung: 4.5 von 5 Sternen4.5/5 (2)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumVon EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumBewertung: 3 von 5 Sternen3/5 (12)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandVon Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandBewertung: 3.5 von 5 Sternen3.5/5 (10)
- AI Superpowers: China, Silicon Valley, and the New World OrderVon EverandAI Superpowers: China, Silicon Valley, and the New World OrderBewertung: 4.5 von 5 Sternen4.5/5 (398)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideVon EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideBewertung: 5 von 5 Sternen5/5 (2)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyVon EverandChip War: The Quest to Dominate the World's Most Critical TechnologyBewertung: 4.5 von 5 Sternen4.5/5 (227)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldVon EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (107)
- Blood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeVon EverandBlood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeBewertung: 4.5 von 5 Sternen4.5/5 (335)
- The Future of Geography: How the Competition in Space Will Change Our WorldVon EverandThe Future of Geography: How the Competition in Space Will Change Our WorldBewertung: 4.5 von 5 Sternen4.5/5 (4)
- So You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenVon EverandSo You Want to Start a Podcast: Finding Your Voice, Telling Your Story, and Building a Community that Will ListenBewertung: 4.5 von 5 Sternen4.5/5 (35)
- The Corporate Startup: How established companies can develop successful innovation ecosystemsVon EverandThe Corporate Startup: How established companies can develop successful innovation ecosystemsBewertung: 4 von 5 Sternen4/5 (6)
- Artificial Intelligence: A Guide for Thinking HumansVon EverandArtificial Intelligence: A Guide for Thinking HumansBewertung: 4.5 von 5 Sternen4.5/5 (30)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseVon EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseBewertung: 3.5 von 5 Sternen3.5/5 (12)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesVon EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesBewertung: 4.5 von 5 Sternen4.5/5 (12)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindVon EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNoch keine Bewertungen